目录
拍照死亡角度一般指的是将自己脸盆子拍得特别大,拍出用鼻孔看人的狰狞面目,比如下面这张照片。在拍照的死亡角度下,镜头畸变会产生失真,让你的体态更圆润、厚实,因此部分美颜软件里人像修正中会有“去畸变”这一项功能。本文就从计算机视觉的角度谈一谈镜头畸变原理。
透视相机模型描述了三维空间中的点与二维图像平面上像素间的映射关系。
根据小孔成像原理,透视相机的成像点与空间点之间方向相反,如图所示。为得到与空间点方向相同的成像点,将成像面沿着光轴移动到归一化成像面,接下来的讨论以归一化成像面为准。
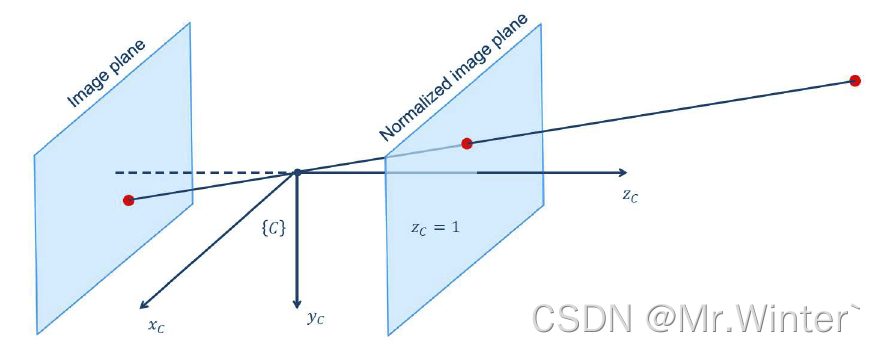
在确定归一化成像面后,从空间点
W
X
~
^W\!\tilde{X}
WX~到像素点
u
~
\tilde{u}
u~的映射可分为两步:

设世界坐标系 { W } \left\{ \boldsymbol{W} \right\} {W}相对于透视相机坐标系 { C } \left\{ \boldsymbol{C} \right\} {C}的位姿为
W C T = [ W C R C p w 0 0 1 ] _{\boldsymbol{W}}^{\boldsymbol{C}}\!\boldsymbol{T}=\left[ \begin{matrix} _{\boldsymbol{W}}^{\boldsymbol{C}}\;\!\!\!\boldsymbol{R}& ^{\boldsymbol{C}}\!\boldsymbol{p}_{w_0}\\ 0& 1\\\end{matrix} \right] WCT=[WCR0Cpw01]
考虑到从三维空间降维到二维平面,设世界坐标值 [ W X W Y W Z 1 ] T \left[ \begin{matrix} ^{\boldsymbol{W}\!}\!X& ^{\boldsymbol{W}\!}\!\!\:\!\:Y& ^{\boldsymbol{W}\!}\!Z& 1\\\end{matrix} \right] ^T [WXWYWZ1]T,则
C x ~ = [ 1 0 0 0 0 1 0 0 0 0 1 0 ] , W C T W X ~ = [ C X C Y C Z ] ^{\boldsymbol{C}}\!\tilde{x}=\left[ \begin{matrix} 1& 0& 0& 0\\ 0& 1& 0& 0\\ 0& 0& 1& 0\\\end{matrix} \right] {\color{white} ,}_{\boldsymbol{W}}^{\boldsymbol{C}}\!\boldsymbol{T}^{\,\,\boldsymbol{W}}\!\!\tilde{X}=\left[ \begin{array}{c} ^{\boldsymbol{C}}\!X\\ ^{\boldsymbol{C}}Y\\ ^{\boldsymbol{C}}\!Z\\\end{array} \right] Cx~=⎣⎡100010001000⎦⎤,WCTWX~=⎣⎡CXCYCZ⎦⎤
在上述推导过程中,称
M E = [ 1 0 0 0 0 1 0 0 0 0 1 0 ] , W C T = [ W C R C p w 0 ] \boldsymbol{M}_{\boldsymbol{E}}=\left[ \begin{matrix} 1& 0& 0& 0\\ 0& 1& 0& 0\\ 0& 0& 1& 0\\\end{matrix} \right] {\color{white} ,}_{\boldsymbol{W}}^{\boldsymbol{C}}\!\boldsymbol{T}=\left[ \begin{matrix} _{\boldsymbol{W}}^{\boldsymbol{C}}\;\!\!\!\boldsymbol{R}& ^{\boldsymbol{C}}\!\boldsymbol{p}_{w_0}\\\end{matrix} \right] ME=⎣⎡100010001000⎦⎤,WCT=[WCRCpw0]
为相机外参矩阵。通常令尺度因子 C Z = 1 ^{\boldsymbol{C}}\!Z=1 CZ=1, C x ~ = [ C X C Z C Y C Z 1 ] T = [ C x ^ C y ^ 1 ] T ^{\boldsymbol{C}}\!\tilde{x}=\left[ \begin{matrix} \frac{^{\boldsymbol{C}}\!X}{^{\boldsymbol{C}}\!Z}& \frac{^{\boldsymbol{C}}Y}{^{\boldsymbol{C}}\!Z}& 1\\\end{matrix} \right] ^T=\left[ \begin{matrix} ^{\boldsymbol{C}}\!\hat{x}& ^{\boldsymbol{C}}\!\hat{y}& 1\\\end{matrix} \right] ^T Cx~=[CZCXCZCY1]T=[Cx^Cy^1]T
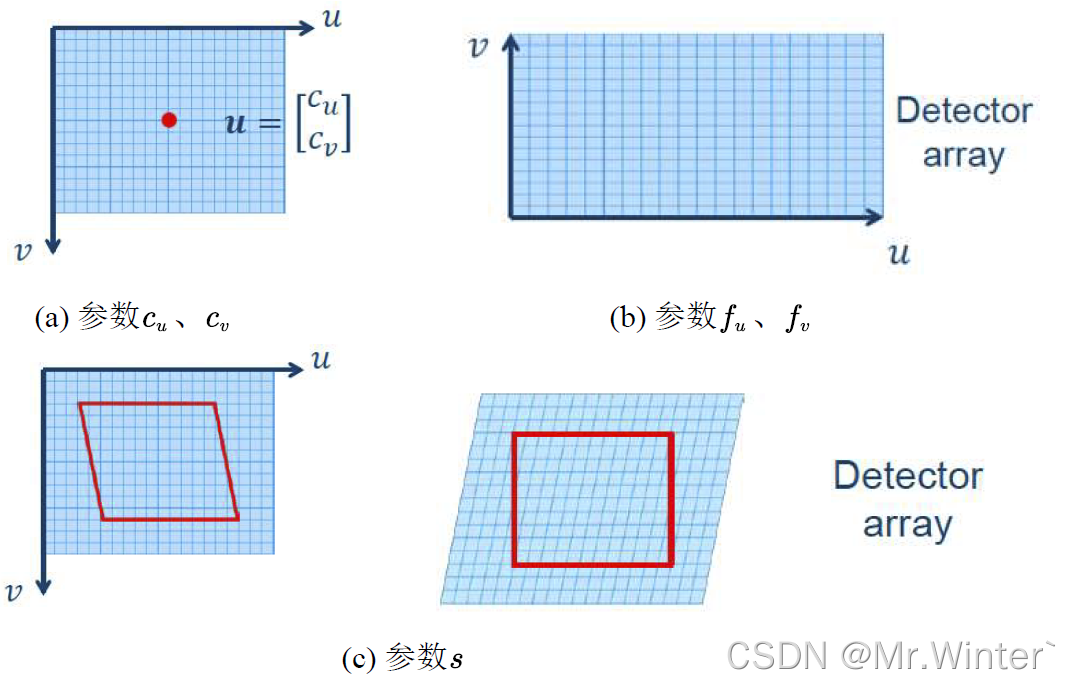
从 C x ~ ^C\!\tilde{x} Cx~到像素 u ~ \tilde{u} u~的映射用三维内参矩阵 K K K来表示,即
u ~ = K C x ~ = [ f u s c u 0 f v c v 0 0 1 ] C x ~ \tilde{u}=\boldsymbol{K}^C\!\tilde{x}=\left[ \begin{matrix} f_u& s& c_u\\ 0& f_v& c_v\\ 0& 0& 1\\\end{matrix} \right] \,\,^C\!\tilde{x} u~=KCx~=⎣⎡fu00sfv0cucv1⎦⎤Cx~
其中
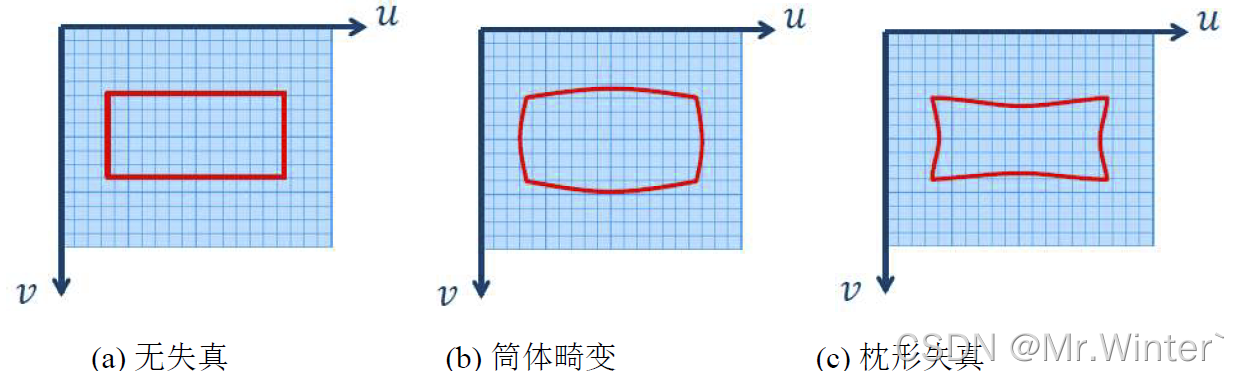
上述透视相机模型基于针孔无限小的假设,但在现实中,光线通过镜头将使相机内部复杂化,产生明显的径向失真——场景中的线条在图像中显示为曲线。径向畸变(Radial Distortion)有两种类型:
此外由于相机组装过程中,透镜不能和成像面严格平行,会引入切向畸变(Tangential Distortion)。
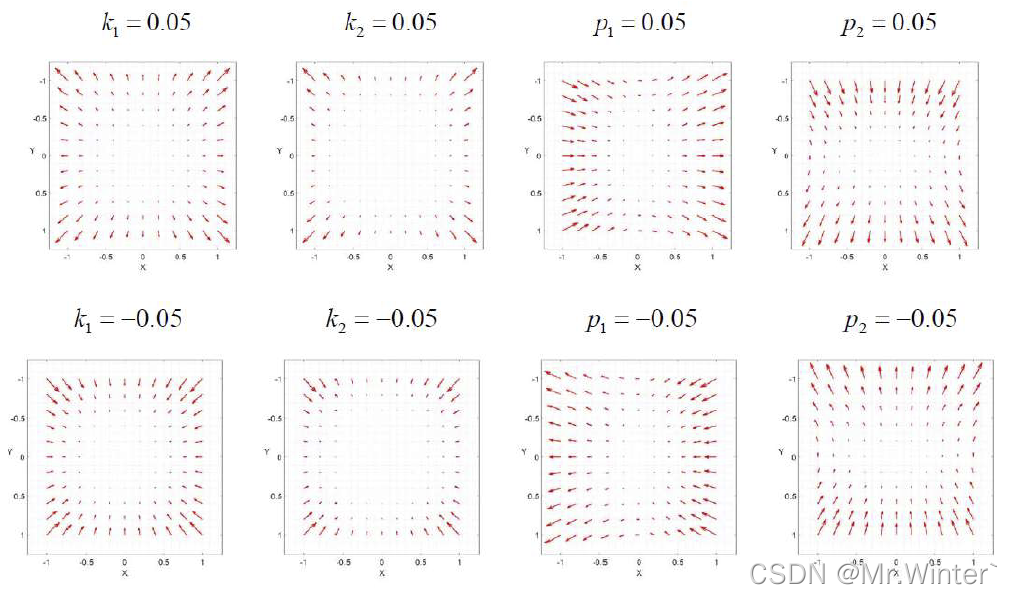
针对具有镜头畸变的相机,不能直接应用透视相机模型,通常需要先通过多项式模型修正这种几何偏差,即:
{ x ^ = x ( 1 + κ 1 r 2 + κ 2 r 4 ) + 2 p 1 x y + p 2 ( r 2 + 2 x 2 ) y ^ = y ( 1 + κ 1 r 2 + κ 2 r 4 ) + p 1 ( r 2 + 2 y 2 ) + 2 p 2 x y \begin{cases} \hat{x}=x\left( 1+\kappa _1r^2+\kappa _2r^4 \right) +2p_1xy+p_2\left( r^2+2x^2 \right)\\ \hat{y}=y\left( 1+\kappa _1r^2+\kappa _2r^4 \right) +p_1\left( r^2+2y^2 \right) +2p_2xy\\\end{cases} {x^=x(1+κ1r2+κ2r4)+2p1xy+p2(r2+2x2)y^=y(1+κ1r2+κ2r4)+p1(r2+2y2)+2p2xy
其中 r 2 = x 2 + y 2 r^2=x^2+y^2 r2=x2+y2, κ 1 \kappa _1 κ1、 κ 2 \kappa _2 κ2称为径向畸变参数, p 1 p_1 p1、 p 2 p_2 p2称为切向畸变参数; ( x , y ) (x,y) (x,y)为畸变坐标, ( x ^ , y ^ ) \left( \hat{x},\hat{y} \right) (x^,y^)为无畸变坐标。
🚀 计算机视觉基础教程说明
章号 内容
0 色彩空间与数字成像
1 计算机几何基础
2 图像增强、滤波、金字塔
3 图像特征提取
4 图像特征描述
5 图像特征匹配
6 立体视觉
7 项目实战
🔥 更多精彩专栏:
这里是Ruby新手。完成一些练习后碰壁了。练习:计算一系列成绩的字母等级创建一个方法get_grade来接受测试分数数组。数组中的每个分数应介于0和100之间,其中100是最大分数。计算平均分并将字母等级作为字符串返回,即“A”、“B”、“C”、“D”、“E”或“F”。我一直返回错误:avg.rb:1:syntaxerror,unexpectedtLBRACK,expecting')'defget_grade([100,90,80])^avg.rb:1:syntaxerror,unexpected')',expecting$end这是我目前所拥有的。我想坚持使用下面的方法或.join,
1.postman介绍Postman一款非常流行的API调试工具。其实,开发人员用的更多。因为测试人员做接口测试会有更多选择,例如Jmeter、soapUI等。不过,对于开发过程中去调试接口,Postman确实足够的简单方便,而且功能强大。2.下载安装官网地址:https://www.postman.com/下载完成后双击安装吧,安装过程极其简单,无需任何操作3.使用教程这里以百度为例,工具使用简单,填写URL地址即可发送请求,在下方查看响应结果和响应状态码常用方法都有支持请求方法:getpostputdeleteGet、Post、Put与Delete的作用get:请求方法一般是用于数据查询,
在VMware16.2.4安装Ubuntu一、安装VMware1.打开VMwareWorkstationPro官网,点击即可进入。2.进入后向下滑动找到Workstation16ProforWindows,点击立即下载。3.下载完成,文件大小615MB,如下图:4.鼠标右击,以管理员身份运行。5.点击下一步6.勾选条款,点击下一步7.先勾选,再点击下一步8.去掉勾选,点击下一步9.点击下一步10.点击安装11.点击许可证12.在百度上搜索VM16许可证,复制填入,然后点击输入即可,亲测有效。13.点击完成14.重启系统,点击是15.双击VMwareWorkstationPro图标,进入虚拟机主
项目介绍随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱小学生兴趣延时班预约小程序的设计与开发被用户普遍使用,为方便用户能够可以随时进行小学生兴趣延时班预约小程序的设计与开发的数据信息管理,特开发了小程序的设计与开发的管理系统。小学生兴趣延时班预约小程序的设计与开发的开发利用现有的成熟技术参考,以源代码为模板,分析功能调整与小学生兴趣延时班预约小程序的设计与开发的实际需求相结合,讨论了小学生兴趣延时班预约小程序的设计与开发的使用。开发环境开发说明:前端使用微信微信小程序开发工具:后端使用ssm:VU
1.1.1 YARN的介绍 为克服Hadoop1.0中HDFS和MapReduce存在的各种问题⽽提出的,针对Hadoop1.0中的MapReduce在扩展性和多框架⽀持⽅⾯的不⾜,提出了全新的资源管理框架YARN. ApacheYARN(YetanotherResourceNegotiator的缩写)是Hadoop集群的资源管理系统,负责为计算程序提供服务器计算资源,相当于⼀个分布式的操作系统平台,⽽MapReduce等计算程序则相当于运⾏于操作系统之上的应⽤程序。 YARN被引⼊Hadoop2,最初是为了改善MapReduce的实现,但是因为具有⾜够的通⽤性,同样可以⽀持其他的分布式计算模
我对如何计算通过{%assignvar=0%}赋值的变量加一完全感到困惑。这应该是最简单的任务。到目前为止,这是我尝试过的:{%assignamount=0%}{%forvariantinproduct.variants%}{%assignamount=amount+1%}{%endfor%}Amount:{{amount}}结果总是0。也许我忽略了一些明显的东西。也许有更好的方法。我想要存档的只是获取运行的迭代次数。 最佳答案 因为{{incrementamount}}将输出您的变量值并且不会影响{%assign%}定义的变量,我
给定一个nxmbool数组:[[true,true,false],[false,true,true],[false,true,true]]有什么简单的方法可以返回“该列中有多少个true?”结果应该是[1,3,2] 最佳答案 使用转置得到一个数组,其中每个子数组代表一列,然后将每一列映射到其中的true数:arr.transpose.map{|subarr|subarr.count(true)}这是一个带有inject的版本,应该在1.8.6上运行,没有任何依赖:arr.transpose.map{|subarr|subarr.in
给定两个大小相等的数组,如何找到不考虑位置的匹配元素的数量?例如:[0,0,5]和[0,5,5]将返回2的匹配项,因为有一个0和一个5共同;[1,0,0,3]和[0,0,1,4]将返回3的匹配项,因为0有两场,1有一场;[1,2,2,3]和[1,2,3,4]将返回3的匹配项。我尝试了很多想法,但它们都变得相当粗糙和令人费解。我猜想有一些不错的Ruby习惯用法,或者可能是一个正则表达式,可以很好地回答这个解决方案。 最佳答案 您可以使用count完成它:a.count{|e|index=b.index(e)andb.delete_at
我是Ruby新手,并被要求在我们的新项目中使用它。我们还被要求使用Padrino(Sinatra)作为后端/框架。我们被要求使用Rspec进行测试。我一直在寻找可以指导在Padrino上使用RspecforRuby的教程。我得到的主要是引用RoR。但是,我需要RubyonPadrino。请在任何入门/指南/引用/讨论等方面指导我。如有不妥之处请指正。可能是我没有针对我的问题搜索正确的词/短语组合。我正在使用Ruby1.9.3和Padrinov.0.10.6。注意:我还提到了SOquestion,但它没有帮助。 最佳答案 我没用过Pa
Ruby中如何“一般地”计算以下格式(有根、无根)的JSON对象的数量?一般来说,我的意思是元素可能不同(例如“标题”被称为其他东西)。没有根:{[{"title":"Post1","body":"Hello!"},{"title":"Post2","body":"Goodbye!"}]}根包裹:{"posts":[{"title":"Post1","body":"Hello!"},{"title":"Post2","body":"Goodbye!"}]} 最佳答案 首先,withoutroot代码不是有效的json格式。它将没有包
