目录
之前有写过单片机的备考资料,点击跳转,看到大家的好评啦~(也非常感谢关注!)
这次是关于嵌入式省赛模板的,同时还包括博主搜索到的各种各样的备考资料!
博主的公众号【耗不尽的先生】感性与理性的分享…
公众号还收集了 💯各大期末不挂科平台 💯的视频和课件:高斯、斐多、猴博士、高数叔 等,快来一起玩呀🙈~
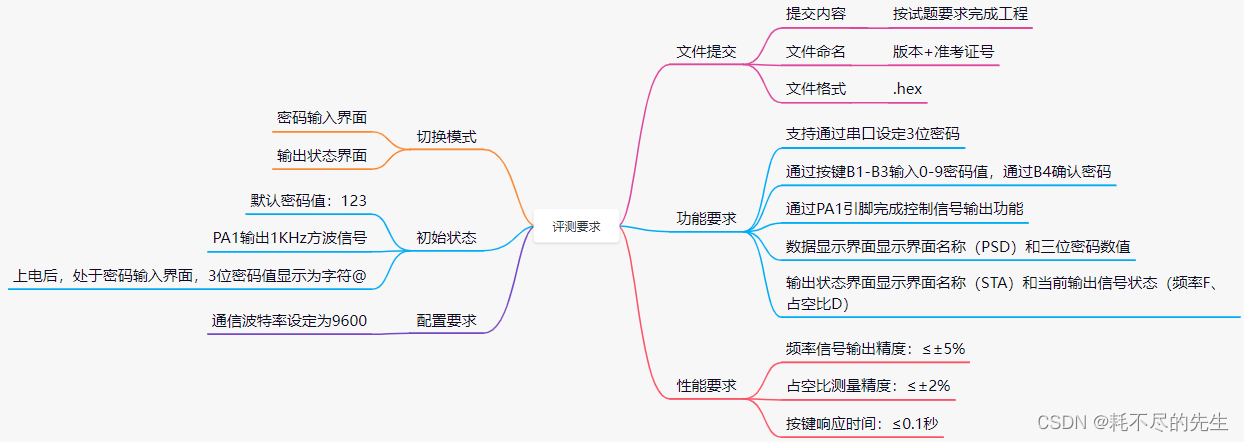
第十三届第一场真题评分细则:
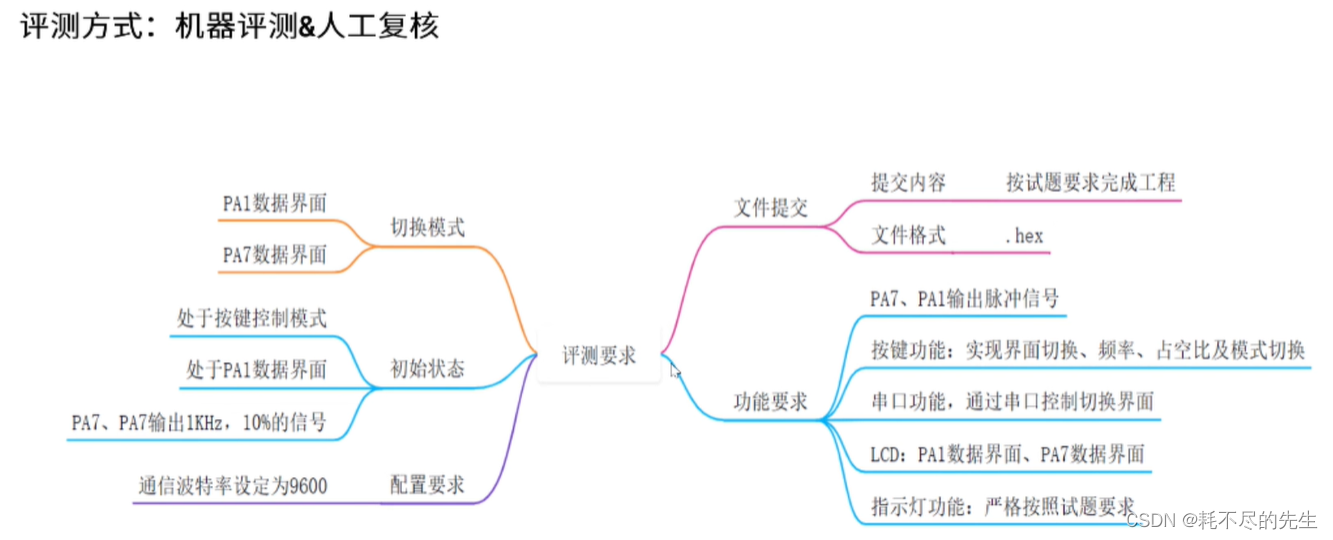
第十四届第二场模拟题评分细则:
欢迎大家进来评论呀,链接实时更新的!
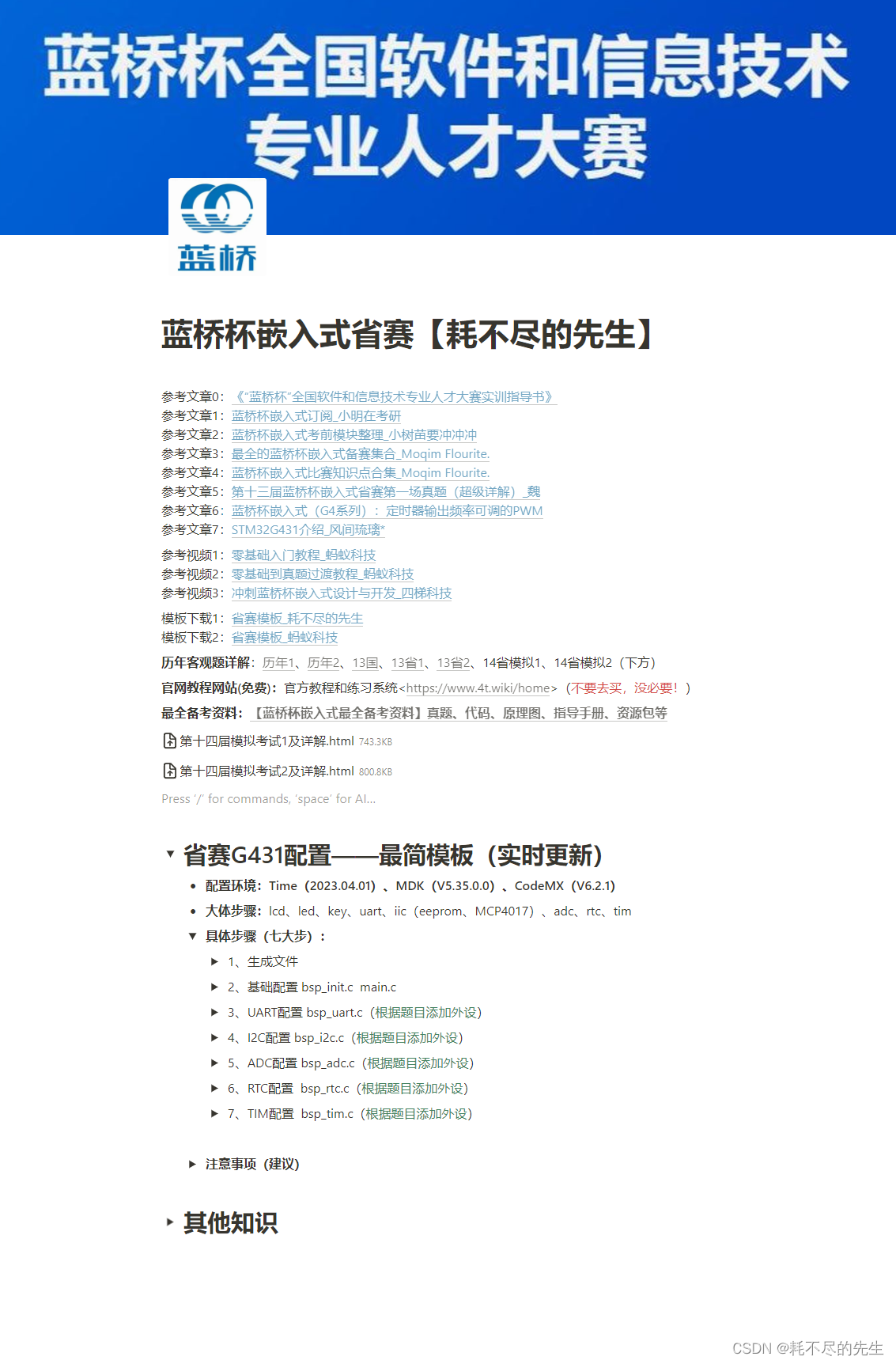
点击进入蓝桥杯嵌入式省赛详细流程【耗不尽的先生】
因为Nation分了很多级别,方便大家一步一步展开学习,其中设计到文件基础配置、CodeMx配置、代码移植等方法流程。
提示:使用省赛模板的前提是大家有一点知识基础了,也可以看里面的参考文章和参考视频学习,这几个是我觉得对大家做的很有帮助滴(虽然我也没有全部看完~)
(官方指导书附近年真题答案,文档自由可编辑,同时也有长天官方嵌入式代码)

(新老版本的资源包都包含)

#include "main.h"
#include "RCC\bsp_rcc.h"
#include "KEY_LED\bsp_key_led.h"
#include "LCD\bsp_lcd.h"
//#include "UART\bsp_uart.h"
//#include "I2C\bsp_i2c.h"
//#include "ADC\bsp_adc.h"
//#include "TIM\bsp_tim.h"
//#include "RTC\bsp_rtc.h"
//***全局变量声明区
//*减速变量
__IO uint32_t uwTick_Key_Set_Point = 0;//控制Key_Proc的执行速度
__IO uint32_t uwTick_Led_Set_Point = 0;//控制Led_Proc的执行速度
__IO uint32_t uwTick_Lcd_Set_Point = 0;//控制Lcd_Proc的执行速度
//__IO uint32_t uwTick_Usart_Set_Point = 0;//控制Usart_Proc的执行速度
//*按键扫描专用变量
uint8_t ucKey_Val, unKey_Down, ucKey_Up, ucKey_Old;
//*LED专用变量
uint8_t ucLed;
//*LCD显示专用变量
uint8_t Lcd_Disp_String[21];//最多显示20个字符
//*串口专用变量
//uint16_t counter = 0;
//uint8_t str[40];
//uint32_t rx_buffer;
//*EEPROM的相关变量
//uint8_t EEPROM_String_1[5] = {0x11,0x22,0x33,0x44,0x55};
//uint8_t EEPROM_String_2[5] = {0};
//*4017相关变量
//uint8_t RES_4017;
//*pwm相关变量
//uint16_t PWM_T_Count;
//uint16_t PWM_D_Count;
//float PWM_Duty;
//*rtc相关变量
//RTC_TimeTypeDef H_M_S_Time;
//RTC_DateTypeDef Y_M_D_Date;
//***子函数声明区
void Key_Proc(void);
void Led_Proc(void);
void Lcd_Proc(void);
//void Usart_Proc(void);
//***系统主函数
int main(void)
{
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/*bsp资源的初始化*/
KEY_LED_Init();
LCD_Init();
LCD_Clear(White);
LCD_SetBackColor(White);
LCD_SetTextColor(Blue);
// UART1_Init();
// I2CInit();
// ADC1_Init();
// ADC2_Init();
//
// BASIC_TIM6_Init();
// PWM_INPUT_TIM2_Init();
// SQU_OUTPUT_TIM15_Init();
// PWM_OUTPUT_TIM3_Init();
// PWM_OUTPUT_TIM17_Init();
// RTC_Init();
/*外设使用基本配置*/
//*EEPROM测试
// iic_24c02_write(EEPROM_String_1, 0, 5);
// HAL_Delay(1);
// iic_24c02_read(EEPROM_String_2, 0, 5);
//*MCP4017测试
// write_resistor(0x77);
// RES_4017 = read_resistor();
//*串口接收中断打开
// HAL_UART_Receive_IT(&huart1, (uint8_t *)(&rx_buffer), 4);
//*打开基本定时器
// HAL_TIM_Base_Start_IT(&htim6);//每100ms触发一次中断
//*输入捕获PWM启动
// HAL_TIM_Base_Start(&htim2); /* 启动定时器 */
// HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1); /* 启动定时器通道输入捕获并开启中断 */
// HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_2);
//*输出方波PA2引脚
// HAL_TIM_OC_Start_IT(&htim15,TIM_CHANNEL_1);
//*启动定时器3和定时器17通道输出
// HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1); //PA6
// HAL_TIM_PWM_Start(&htim17,TIM_CHANNEL_1); //PA7
while (1)
{
Key_Proc();
Led_Proc();
Lcd_Proc();
// Usart_Proc();
}
}
//***按键扫描子函数
void Key_Proc(void)
{
if((uwTick - uwTick_Key_Set_Point)<50) return;//减速函数
uwTick_Key_Set_Point = uwTick;
ucKey_Val = Key_Scan();
unKey_Down = ucKey_Val & (ucKey_Old ^ ucKey_Val);
ucKey_Up = ~ucKey_Val & (ucKey_Old ^ ucKey_Val);
ucKey_Old = ucKey_Val;
if(unKey_Down == 4)
{
ucLed = 0x88;
}
if(unKey_Down == 3)
{
ucLed = 0x00;
}
}
//***LED扫描子函数
void Led_Proc(void)
{
if((uwTick - uwTick_Led_Set_Point)<200) return;//减速函数
uwTick_Led_Set_Point = uwTick;
LED_Disp(ucLed);
}
void Lcd_Proc(void)
{
if((uwTick - uwTick_Lcd_Set_Point)<100) return;//减速函数
uwTick_Lcd_Set_Point = uwTick;
//开机屏幕测试代码
sprintf((char *)Lcd_Disp_String, "TEST CODE:%02X",ucLed);
LCD_DisplayStringLine(Line9, Lcd_Disp_String);
//*EEPROM测试
// sprintf((char *)Lcd_Disp_String, "EE:%x%x%x%x%x R:%x",EEPROM_String_2[0],EEPROM_String_2[1],EEPROM_String_2[2],EEPROM_String_2[3],EEPROM_String_2[4], RES_4017);
// LCD_DisplayStringLine(Line0, Lcd_Disp_String);
//*ADC测试
// sprintf((char *)Lcd_Disp_String, "R38_Vol:%6.3fV",((((float)getADC1())/4096)*3.3));
// LCD_DisplayStringLine(Line1, Lcd_Disp_String);
//
// sprintf((char *)Lcd_Disp_String, "R37_Vol:%6.3fV",((((float)getADC2())/4096)*3.3));
// LCD_DisplayStringLine(Line2, Lcd_Disp_String);
//*PWM输入捕获测试,测量占空比和频率
// sprintf((char *)Lcd_Disp_String, "R40P:%05dHz,%4.1f%%",(unsigned int)(1000000/PWM_T_Count),PWM_Duty*100);
// LCD_DisplayStringLine(Line3, Lcd_Disp_String);
//*RTC内容显示
// HAL_RTC_GetTime(&hrtc, &H_M_S_Time, RTC_FORMAT_BIN);//读取日期和时间必须同时使用
// HAL_RTC_GetDate(&hrtc, &Y_M_D_Date, RTC_FORMAT_BIN);
// sprintf((char *)Lcd_Disp_String, "Time:%02d-%02d-%02d",(unsigned int)H_M_S_Time.Hours,(unsigned int)H_M_S_Time.Minutes,(unsigned int)H_M_S_Time.Seconds);
// LCD_DisplayStringLine(Line4, Lcd_Disp_String);
}
//void Usart_Proc(void)
//{
// if((uwTick - uwTick_Usart_Set_Point)<1000) return;//减速函数
// uwTick_Usart_Set_Point = uwTick;
//
sprintf(str, "%04d:Hello,world.\r\n", counter);
HAL_UART_Transmit(&huart1,(unsigned char *)str, strlen(str), 50);
//
if(++counter == 10000)
counter = 0;
//}
//串口接收
//void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
//{
counter++;
sprintf(str, "%04d:Hello,world.\r\n", counter);
HAL_UART_Transmit(&huart1,(unsigned char *)str, strlen(str), 50);
HAL_UART_Receive_IT(&huart1, (uint8_t *)(&rx_buffer), 4);
//}
//基本定时器6更新回调函数
//void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
//{
// if(htim->Instance==TIM6)
// {
if(++counter == 10)
{
counter = 0;
sprintf(str, "Hello,world.\r\n");
HAL_UART_Transmit(&huart1,(unsigned char *)str, strlen(str), 50);
}
// }
//}
//输入捕获PWM中断回调
//void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
//{
// if(htim->Instance==TIM2)
// {
// if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
// {
// PWM_T_Count = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1)+1;
// PWM_Duty = (float)PWM_D_Count/PWM_T_Count;
// }
// else if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
// {
// PWM_D_Count = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_2)+1;
// }
// }
//}
//方波输出回调函数
//void HAL_TIM_OC_DelayElapsedCallback(TIM_HandleTypeDef *htim)
//{
// if(htim->Instance==TIM15)
// {
// if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
// {
// __HAL_TIM_SET_COMPARE(htim,TIM_CHANNEL_1,(__HAL_TIM_GetCounter(htim)+500));//1Khz
// }
// }
//}
void Error_Handler(void)
{
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
}
如何在buildr项目中使用Ruby?我在很多不同的项目中使用过Ruby、JRuby、Java和Clojure。我目前正在使用我的标准Ruby开发一个模拟应用程序,我想尝试使用Clojure后端(我确实喜欢功能代码)以及JRubygui和测试套件。我还可以看到在未来的不同项目中使用Scala作为后端。我想我要为我的项目尝试一下buildr(http://buildr.apache.org/),但我注意到buildr似乎没有设置为在项目中使用JRuby代码本身!这看起来有点傻,因为该工具旨在统一通用的JVM语言并且是在ruby中构建的。除了将输出的jar包含在一个独特的、仅限ruby
在rails源中:https://github.com/rails/rails/blob/master/activesupport/lib/active_support/lazy_load_hooks.rb可以看到以下内容@load_hooks=Hash.new{|h,k|h[k]=[]}在IRB中,它只是初始化一个空哈希。和做有什么区别@load_hooks=Hash.new 最佳答案 查看rubydocumentationforHashnew→new_hashclicktotogglesourcenew(obj)→new_has
我的主要目标是能够完全理解我正在使用的库/gem。我尝试在Github上从头到尾阅读源代码,但这真的很难。我认为更有趣、更温和的踏脚石就是在使用时阅读每个库/gem方法的源代码。例如,我想知道RubyonRails中的redirect_to方法是如何工作的:如何查找redirect_to方法的源代码?我知道在pry中我可以执行类似show-methodmethod的操作,但我如何才能对Rails框架中的方法执行此操作?您对我如何更好地理解Gem及其API有什么建议吗?仅仅阅读源代码似乎真的很难,尤其是对于框架。谢谢! 最佳答案 Ru
我的假设是moduleAmoduleBendend和moduleA::Bend是一样的。我能够从thisblog找到解决方案,thisSOthread和andthisSOthread.为什么以及什么时候应该更喜欢紧凑语法A::B而不是另一个,因为它显然有一个缺点?我有一种直觉,它可能与性能有关,因为在更多命名空间中查找常量需要更多计算。但是我无法通过对普通类进行基准测试来验证这一点。 最佳答案 这两种写作方法经常被混淆。首先要说的是,据我所知,没有可衡量的性能差异。(在下面的书面示例中不断查找)最明显的区别,可能也是最著名的,是你的
几个月前,我读了一篇关于rubygem的博客文章,它可以通过阅读代码本身来确定编程语言。对于我的生活,我不记得博客或gem的名称。谷歌搜索“ruby编程语言猜测”及其变体也无济于事。有人碰巧知道相关gem的名称吗? 最佳答案 是这个吗:http://github.com/chrislo/sourceclassifier/tree/master 关于ruby-寻找通过阅读代码确定编程语言的rubygem?,我们在StackOverflow上找到一个类似的问题:
我目前正在使用以下方法获取页面的源代码:Net::HTTP.get(URI.parse(page.url))我还想获取HTTP状态,而无需发出第二个请求。有没有办法用另一种方法做到这一点?我一直在查看文档,但似乎找不到我要找的东西。 最佳答案 在我看来,除非您需要一些真正的低级访问或控制,否则最好使用Ruby的内置Open::URI模块:require'open-uri'io=open('http://www.example.org/')#=>#body=io.read[0,50]#=>"["200","OK"]io.base_ur
前言作为一名程序员,自己的本质工作就是做程序开发,那么程序开发的时候最直接的体现就是代码,检验一个程序员技术水平的一个核心环节就是开发时候的代码能力。众所周知,程序开发的水平提升是一个循序渐进的过程,每一位程序员都是从“菜鸟”变成“大神”的,所以程序员在程序开发过程中的代码能力也是根据平时开发中的业务实践来积累和提升的。提高代码能力核心要素程序员要想提高自身代码能力,尤其是新晋程序员的代码能力有很大的提升空间的时候,需要针对性的去提高自己的代码能力。提高代码能力其实有几个比较关键的点,只要把握住这些方面,就能很好的、快速的提高自己的一部分代码能力。1、多去阅读开源项目,如有机会可以亲自参与开源
嗨~大家好,这里是可莉!今天给大家带来的是7个C语言的经典基础代码~那一起往下看下去把【程序一】打印100到200之间的素数#includeintmain(){ inti; for(i=100;i 【程序二】输出乘法口诀表#includeintmain(){inti;for(i=1;i 【程序三】判断1000年---2000年之间的闰年#includeintmain(){intyear;for(year=1000;year 【程序四】给定两个整形变量的值,将两个值的内容进行交换。这里提供两种方法来进行交换,第一种为创建临时变量来进行交换,第二种是不创建临时变量而直接进行交换。1.创建临时变量来
文章目录git常用命令(简介,详细参数往下看)Git提交代码步骤gitpullgitstatusgitaddgitcommitgitpushgit代码冲突合并问题方法一:放弃本地代码方法二:合并代码常用命令以及详细参数gitadd将文件添加到仓库:gitdiff比较文件异同gitlog查看历史记录gitreset代码回滚版本库相关操作远程仓库相关操作分支相关操作创建分支查看分支:gitbranch合并分支:gitmerge删除分支:gitbranch-ddev查看分支合并图:gitlog–graph–pretty=oneline–abbrev-commit撤消某次提交git用户名密码相关配置g
打印1:defsum(i)i=i+[2]end$x=[1]sum($x)print$x打印12:defsum(i)i.push(2)end$x=[1]sum($x)print$x后者是修改全局变量$x。为什么它在第二个例子中被修改而不是在第一个例子中?类Array的任何方法(不仅是push)都会发生这种情况吗? 最佳答案 变量范围在这里无关紧要。在第一段代码中,您仅使用赋值运算符=为变量i赋值,而在第二段代码中,您正在修改$x(也称为i)使用破坏性方法push。赋值从不修改任何对象。它只是提供一个名称来引用一个对象。方法要么是破坏性