Ceres 有一个自动求导功能,只要你按照Ceres要求的格式写好目标函数,Ceres会自动帮你计算精确的导数(或者雅克比矩阵),这极大节约了算法开发者的时间,但是笔者在使用的时候一直觉得这是个黑盒子,特别是之前在做深度学习的时候,神经网络本事是一个很盒模型了,再加上 pytorch 的自动求导,简直是黑上加黑。现在转入视觉SLAM方向,又碰到了 Ceres 的自动求导,是时候揭开其真实的面纱了。知其然并知其所以然才是一名算法工程师应有的基本素养。
Ceres 一共有三种求导的方式提供给开发者,分别是:
解析求导,也就是手动计算出导数的解析形式。
例如有如下函数;
构建误差函数:
对待优化变量的导数为:
数值求导,当对变量增加一个微小的增量,然后观察此时的残差和原先残差的下降比例即可,其实就是导数的定义。
当然其实也有两种形式对导数进行数值上的近似,第一种是Forward Differences:
第二种是 Central Differences:
Ceres 的官方文档上是认为第二种比第一种好的,但是其实官方还介绍了第三种,这里就不详说了,感兴趣的可以去看官方文档:Ridders’ Method。
这里有三种数值微分方法的效果对比,从右向左看:
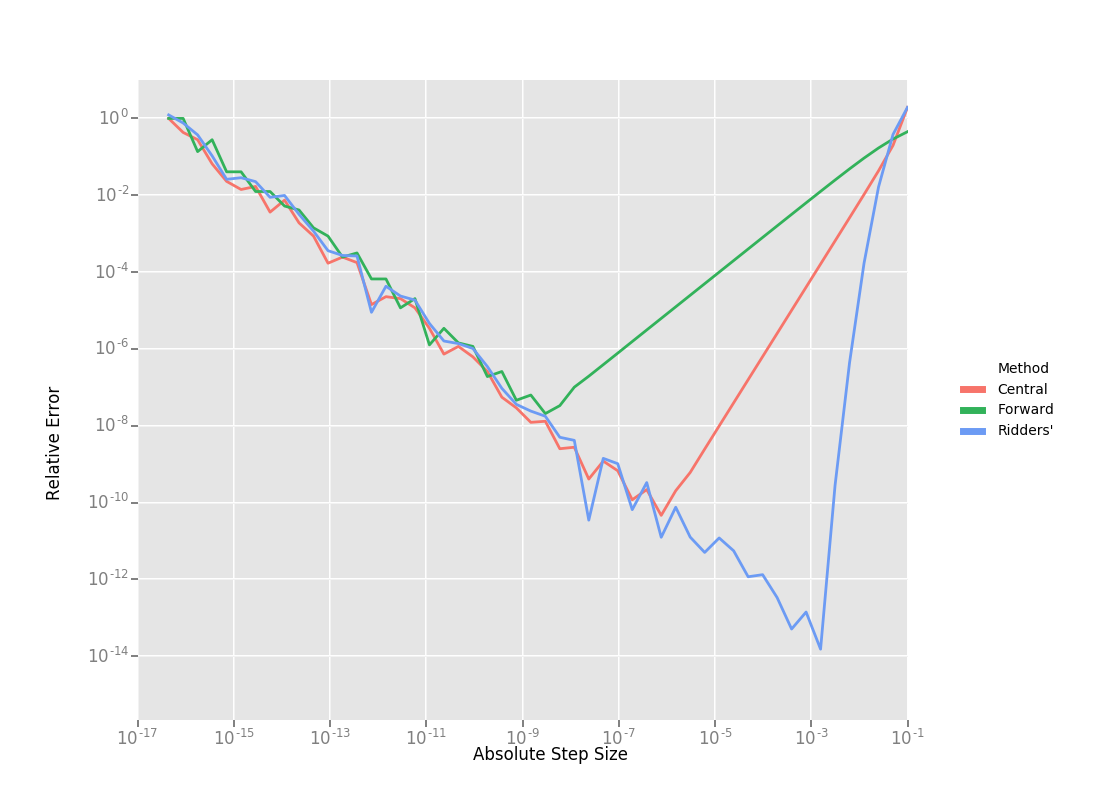
效果依次是 \(Ridders > Central > Forwad\)
其实官方对自动求导做出了解释,但是笔者觉得写的不够直观,比较抽象,不过既然是官方出品,还是非常有必要去看一看的。http://ceres-solver.org/automatic_derivatives.html。
\(\quad\)这里笔者根据网上和官方的资料整理了一下自己的理解。Ceres 自动求导的核心是运算符的重载与Ceres自有的 Jet 变量。
举一个例子:
函数 \(\mathrm{f}(\mathrm{x})=\mathrm{h}(\mathrm{x}) * \mathrm{~g}(\mathrm{x})\) , 他的目标函数值为 \(\mathrm{h}(\mathrm{x}) * \mathrm{~g}(\mathrm{x})\) , 导数为
其中 \(h(x)\), \(g(x)\) 都是标量函数.
如果我们定义一种数据类型,
并且对于数据类型 Data,重载乘法运算符
令 \(h(x) =[h(x),{h(x)}' ] , g(x)=[g(x),{g(x)' }]\)。\(f(x)=h(x) * g(x)\), 那么f_x.derived 就是\(f(x)\)的导数,f_x.value 即为\(f(x)\)的数值。value 储存变量的函数值, derived 储存变量对 \(\mathrm{x}\) 的导数。类似,如果我们对数据类型 Data 重载所有可能用到的运算符. “\(+- * / \log , \exp , \cdots\)” 。那么在变量 \(h(x),g(x)\)经过任意次运算后,\(result=h(x)+g(x)*h(x)+exp(h(x))…\), 任然能获得函数值 result.value 和他的导数值 result.derived,这就是Ceres 自动求导的原理。
上面讲的都是单一自变量的自动求导,对于多元函数\(f(x_i)\)。对于n 元函数,Data 里面的 double derived 就替换为 double* derived,derived[i] 为对于第i个自变量的导数值。
并且对于数据类型 Data,乘法运算符重载为
其余的运算符重载方法也做相应改变。这样对多元函数的自动求导问题也就解决了。Ceres 里面的Jet 数据类型类似于 这里Data 类型,并且Ceres 对Jet 数据类型进行了几乎所有数学运算符的重载,以达到自动求导的目的。
这里我们模仿 Ceres 实现了 Jet ,并准备了两个具体的示例程序,Jet 具体代码在 ceres_jet.hpp 中,包装成了一个头文件,在使用的时候进行调用即可。这里也包含了一个 ceres_rotation.hpp 的头文件,是为了我们的第二个例子实现。具体代码如下:
ceres_jet.hpp#ifndef _CERES_JET_HPP__
#define _CERES_JET_HPP__
#include <math.h>
#include <stdio.h>
#include <eigen3/Eigen/Core>
#include <eigen3/Eigen/Dense>
#include <eigen3/Eigen/Sparse>
#include "eigen3/Eigen/Eigen"
#include "eigen3/Eigen/SparseQR"
#include <fstream>
#include <iostream>
#include <map>
#include <queue>
#include <set>
#include <vector>
#include "ceres_rotation.hpp"
#include "algorithm"
#include "stdlib.h"
template <int N>
struct jet
{
Eigen::Matrix<double, N, 1> v;
double a;
jet() : a(0.0) {}
jet(const double& value) : a(value) { v.setZero(); }
EIGEN_STRONG_INLINE jet(const double& value,
const Eigen::Matrix<double, N, 1>& v_)
: a(value), v(v_)
{
}
jet(const double value, const int index)
{
v.setZero();
a = value;
v(index, 0) = 1.0;
}
void init(const double value, const int index)
{
v.setZero();
a = value;
v(index, 0) = 1.0;
}
};
/****************jet overload******************/
// for the camera BA,the autodiff only need overload the operator :jet+jet
// number+jet -jet jet-number jet*jet number/jet jet/jet sqrt(jet) cos(jet)
// sin(jet) +=(jet) overload jet + jet
template <int N>
inline jet<N> operator+(const jet<N>& A, const jet<N>& B)
{
return jet<N>(A.a + B.a, A.v + B.v);
} // end jet+jet
// overload number + jet
template <int N>
inline jet<N> operator+(double A, const jet<N>& B)
{
return jet<N>(A + B.a, B.v);
} // end number+jet
template <int N>
inline jet<N> operator+(const jet<N>& B, double A)
{
return jet<N>(A + B.a, B.v);
} // end number+jet
// overload jet-number
template <int N>
inline jet<N> operator-(const jet<N>& A, double B)
{
return jet<N>(A.a - B, A.v);
}
// overload number * jet because jet *jet need A.a *B.v+B.a*A.v.So the number
// *jet is required
template <int N>
inline jet<N> operator*(double A, const jet<N>& B)
{
return jet<N>(A * B.a, A * B.v);
}
template <int N>
inline jet<N> operator*(const jet<N>& A, double B)
{
return jet<N>(B * A.a, B * A.v);
}
// overload -jet
template <int N>
inline jet<N> operator-(const jet<N>& A)
{
return jet<N>(-A.a, -A.v);
}
template <int N>
inline jet<N> operator-(double A, const jet<N>& B)
{
return jet<N>(A - B.a, -B.v);
}
template <int N>
inline jet<N> operator-(const jet<N>& A, const jet<N>& B)
{
return jet<N>(A.a - B.a, A.v - B.v);
}
// overload jet*jet
template <int N>
inline jet<N> operator*(const jet<N>& A, const jet<N>& B)
{
return jet<N>(A.a * B.a, B.a * A.v + A.a * B.v);
}
// overload number/jet
template <int N>
inline jet<N> operator/(double A, const jet<N>& B)
{
return jet<N>(A / B.a, -A * B.v / (B.a * B.a));
}
// overload jet/jet
template <int N>
inline jet<N> operator/(const jet<N>& A, const jet<N>& B)
{
// This uses:
//
// a + u (a + u)(b - v) (a + u)(b - v)
// ----- = -------------- = --------------
// b + v (b + v)(b - v) b^2
//
// which holds because v*v = 0.
const double a_inverse = 1.0 / B.a;
const double abyb = A.a * a_inverse;
return jet<N>(abyb, (A.v - abyb * B.v) * a_inverse);
}
// sqrt(jet)
template <int N>
inline jet<N> sqrt(const jet<N>& A)
{
double t = std::sqrt(A.a);
return jet<N>(t, 1.0 / (2.0 * t) * A.v);
}
// cos(jet)
template <int N>
inline jet<N> cos(const jet<N>& A)
{
return jet<N>(std::cos(A.a), -std::sin(A.a) * A.v);
}
template <int N>
inline jet<N> sin(const jet<N>& A)
{
return jet<N>(std::sin(A.a), std::cos(A.a) * A.v);
}
template <int N>
inline bool operator>(const jet<N>& f, const jet<N>& g)
{
return f.a > g.a;
}
#endif //_CERES_JET_HPP__
ceres_rotation.hpp#ifndef CERES_ROTATION_HPP_
#define CERES_ROTATION_HPP_
#include <iostream>
template <typename T>
inline T DotProduct(const T x[3], const T y[3])
{
return (x[0] * y[0] + x[1] * y[1] + x[2] * y[2]);
}
template <typename T>
inline void AngleAxisRotatePoint(const T angle_axis[3], const T pt[3],
T result[3])
{
const T theta2 = DotProduct(angle_axis, angle_axis);
if (theta2 > T(std::numeric_limits<double>::epsilon()))
{
// Away from zero, use the rodriguez formula
//
// result = pt costheta +
// (w x pt) * sintheta +
// w (w . pt) (1 - costheta)
//
// We want to be careful to only evaluate the square root if the
// norm of the angle_axis vector is greater than zero. Otherwise
// we get a division by zero.
//
const T theta = sqrt(theta2);
const T costheta = cos(theta);
const T sintheta = sin(theta);
const T theta_inverse = T(1.0) / theta;
const T w[3] = {angle_axis[0] * theta_inverse,
angle_axis[1] * theta_inverse,
angle_axis[2] * theta_inverse};
// Explicitly inlined evaluation of the cross product for
// performance reasons.
const T w_cross_pt[3] = {w[1] * pt[2] - w[2] * pt[1],
w[2] * pt[0] - w[0] * pt[2],
w[0] * pt[1] - w[1] * pt[0]};
const T tmp =
(w[0] * pt[0] + w[1] * pt[1] + w[2] * pt[2]) * (T(1.0) - costheta);
result[0] = pt[0] * costheta + w_cross_pt[0] * sintheta + w[0] * tmp;
result[1] = pt[1] * costheta + w_cross_pt[1] * sintheta + w[1] * tmp;
result[2] = pt[2] * costheta + w_cross_pt[2] * sintheta + w[2] * tmp;
}
else
{
// Near zero, the first order Taylor approximation of the rotation
// matrix R corresponding to a vector w and angle w is
//
// R = I + hat(w) * sin(theta)
//
// But sintheta ~ theta and theta * w = angle_axis, which gives us
//
// R = I + hat(w)
//
// and actually performing multiplication with the point pt, gives us
// R * pt = pt + w x pt.
//
// Switching to the Taylor expansion near zero provides meaningful
// derivatives when evaluated using Jets.
//
// Explicitly inlined evaluation of the cross product for
// performance reasons.
const T w_cross_pt[3] = {angle_axis[1] * pt[2] - angle_axis[2] * pt[1],
angle_axis[2] * pt[0] - angle_axis[0] * pt[2],
angle_axis[0] * pt[1] - angle_axis[1] * pt[0]};
result[0] = pt[0] + w_cross_pt[0];
result[1] = pt[1] + w_cross_pt[1];
result[2] = pt[2] + w_cross_pt[2];
}
}
#endif // CERES_ROTATION_HPP_
这里我们准备了两个实践案例,一个是对下面的函数进行自动求导,求在 \(f(1,2)\) 处的导数。
代码如下:
#include <eigen3/Eigen/Core>
#include <eigen3/Eigen/Dense>
#include "ceres_jet.hpp"
int main(int argc, char const *argv[])
{
/// f(x,y) = 2*x^2 + 3*y^3 + 3
/// 残差的维度,变量1的维度,变量2的维度
const int N = 1, N1 = 1, N2 = 1;
Eigen::Matrix<double, N, N1> jacobian_parameter1;
Eigen::Matrix<double, N, N2> jacobian_parameter2;
Eigen::Matrix<double, N, 1> jacobi_residual;
/// 模板参数为向量的维度,一定要是 N1+N2
/// 也就是总的变量的维度,因为要存储结果(残差)
/// 对于每个变量的导数值
/// 至于为什么有 N1 个 jet 表示 var_x
/// 假设变量 1 的维度为 N1,则残差对该变量的导数的维度是一个 N*N1 的矩阵
/// 一个 jet<N1 + N2> 只能表示变量中的某一个在当前点的导数和值
jet<N1 + N2> var_x[N1];
jet<N1 + N2> var_y[N2];
jet<N1 + N2> residual[N];
/// 假设我们求上面的方程在 (x,y)->(1.0,2.0) 处的导数值
double var_x_init_value[N1] = {1.0};
double var_y_init_value[N1] = {2.0};
for (int i = 0; i < N1; i++)
{
var_x[i].init(var_x_init_value[i], i);
}
for (int i = 0; i < N2; i++)
{
var_y[i].init(var_y_init_value[i], i + N1);
}
/// f(x,y) = 2*x^2 + 3*y^3 + 3
/// f_x` = 4x
/// f_y` = 9 * y^2
residual[0] = 2.0 * var_x[0] * var_x[0] + 3.0 * var_y[0] * var_y[0] * var_y[0] + 3.0;
std::cout << "residual: " << residual[0].a << std::endl;
std::cout << "jacobian: " << residual[0].v.transpose() << std::endl;
/// residual: 29
/// jacobian: 4 36
return 0;
}
输出结果,读者可以自己求导算一下,是正确的。
residual: 29
jacobian: 4 36
这里是用的 Bal 数据集中的某个观测构建的误差项求导
#include "ceres_jet.hpp"
class costfunction
{
public:
double x_;
double y_;
costfunction(double x, double y) : x_(x), y_(y) {}
template <class T>
void Evaluate(const T* camera, const T* point, T* residual)
{
T result[3];
AngleAxisRotatePoint(camera, point, result);
result[0] = result[0] + camera[3];
result[1] = result[1] + camera[4];
result[2] = result[2] + camera[5];
T xp = -result[0] / result[2];
T yp = -result[1] / result[2];
T r2 = xp * xp + yp * yp;
T distortion = 1.0 + r2 * (camera[7] + camera[8] * r2);
T predicted_x = camera[6] * distortion * xp;
T predicted_y = camera[6] * distortion * yp;
residual[0] = predicted_x - x_;
residual[1] = predicted_y - y_;
}
};
int main(int argc, char const* argv[])
{
const int N = 2, N1 = 9, N2 = 3;
Eigen::Matrix<double, N, N1> jacobi_parameter_1;
Eigen::Matrix<double, N, N2> jacobi_parameter_2;
Eigen::Matrix<double, N, 1> jacobi_residual;
costfunction* costfunction_ = new costfunction(-3.326500e+02, 2.620900e+02);
jet<N1 + N2> cameraJet[N1];
jet<N1 + N2> pointJet[N2];
double params_1[N1] = {
1.5741515942940262e-02, -1.2790936163850642e-02, -4.4008498081980789e-03,
-3.4093839577186584e-02, -1.0751387104921525e-01, 1.1202240291236032e+00,
3.9975152639358436e+02, -3.1770643852803579e-07, 5.8820490534594022e-13};
double params_2[N2] = {-0.612000157172, 0.571759047760, -1.847081276455};
for (int i = 0; i < N1; i++)
{
cameraJet[i].init(params_1[i], i);
}
for (int i = 0; i < N2; i++)
{
pointJet[i].init(params_2[i], i + N1);
}
jet<N1 + N2>* residual = new jet<N1 + N2>[N];
costfunction_->Evaluate(cameraJet, pointJet, residual);
for (int i = 0; i < N; i++)
{
jacobi_residual(i, 0) = residual[i].a;
}
for (int i = 0; i < N; i++)
{
jacobi_parameter_1.row(i) = residual[i].v.head(N1);
jacobi_parameter_2.row(i) = residual[i].v.tail(N2);
}
/*
real result:
jacobi_parameter_1:
-283.512 -1296.34 -320.603 551.177 0.000204691 -471.095 -0.854706 -409.362 -490.465
1242.05 220.93 -332.566 0.000204691 551.177 376.9 0.68381 327.511 392.397
jacobi_parameter_2:
545.118 -5.05828 -478.067
2.32675 557.047 368.163
jacobi_residual:
-9.02023
11.264
*/
std::cout << "jacobi_parameter_1: \n" << jacobi_parameter_1 << std::endl;
std::cout << "jacobi_parameter_2: \n" << jacobi_parameter_2 << std::endl;
std::cout << "jacobi_residual: \n" << jacobi_residual << std::endl;
delete (residual);
return 0;
}
输出结果
jacobi_parameter_1:
-283.512 -1296.34 -320.603 551.177 0.000204691 -471.095 -0.854706 -409.362 -490.465
1242.05 220.93 -332.566 0.000204691 551.177 376.9 0.68381 327.511 392.397
jacobi_parameter_2:
545.118 -5.05828 -478.067
2.32675 557.047 368.163
jacobi_residual:
-9.02023
11.264
我有一个字符串input="maybe(thisis|thatwas)some((nice|ugly)(day|night)|(strange(weather|time)))"Ruby中解析该字符串的最佳方法是什么?我的意思是脚本应该能够像这样构建句子:maybethisissomeuglynightmaybethatwassomenicenightmaybethiswassomestrangetime等等,你明白了......我应该一个字符一个字符地读取字符串并构建一个带有堆栈的状态机来存储括号值以供以后计算,还是有更好的方法?也许为此目的准备了一个开箱即用的库?
很好奇,就使用rubyonrails自动化单元测试而言,你们正在做什么?您是否创建了一个脚本来在cron中运行rake作业并将结果邮寄给您?git中的预提交Hook?只是手动调用?我完全理解测试,但想知道在错误发生之前捕获错误的最佳实践是什么。让我们理所当然地认为测试本身是完美无缺的,并且可以正常工作。下一步是什么以确保他们在正确的时间将可能有害的结果传达给您? 最佳答案 不确定您到底想听什么,但是有几个级别的自动代码库控制:在处理某项功能时,您可以使用类似autotest的内容获得关于哪些有效,哪些无效的即时反馈。要确保您的提
我主要使用Ruby来执行此操作,但到目前为止我的攻击计划如下:使用gemsrdf、rdf-rdfa和rdf-microdata或mida来解析给定任何URI的数据。我认为最好映射到像schema.org这样的统一模式,例如使用这个yaml文件,它试图描述数据词汇表和opengraph到schema.org之间的转换:#SchemaXtoschema.orgconversion#data-vocabularyDV:name:namestreet-address:streetAddressregion:addressRegionlocality:addressLocalityphoto:i
我正在使用ruby1.9解析以下带有MacRoman字符的csv文件#encoding:ISO-8859-1#csv_parse.csvName,main-dialogue"Marceu","Giveittohimóhe,hiswife."我做了以下解析。require'csv'input_string=File.read("../csv_parse.rb").force_encoding("ISO-8859-1").encode("UTF-8")#=>"Name,main-dialogue\r\n\"Marceu\",\"Giveittohim\x97he,hiswife.\"\
我收到这个错误:RuntimeError(自动加载常量Apps时检测到循环依赖当我使用多线程时。下面是我的代码。为什么会这样?我尝试多线程的原因是因为我正在编写一个HTML抓取应用程序。对Nokogiri::HTML(open())的调用是一个同步阻塞调用,需要1秒才能返回,我有100,000多个页面要访问,所以我试图运行多个线程来解决这个问题。有更好的方法吗?classToolsController0)app.website=array.join(',')putsapp.websiteelseapp.website="NONE"endapp.saveapps=Apps.order("
简而言之错误:NOTE:Gem::SourceIndex#add_specisdeprecated,useSpecification.add_spec.Itwillberemovedonorafter2011-11-01.Gem::SourceIndex#add_speccalledfrom/opt/local/lib/ruby/site_ruby/1.8/rubygems/source_index.rb:91./opt/local/lib/ruby/gems/1.8/gems/rails-2.3.8/lib/rails/gem_dependency.rb:275:in`==':und
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
我们目前正在为ROR3.2开发自定义cms引擎。在这个过程中,我们希望成为我们的rails应用程序中的一等公民的几个类类型起源,这意味着它们应该驻留在应用程序的app文件夹下,它是插件。目前我们有以下类型:数据源数据类型查看我在app文件夹下创建了多个目录来保存这些:应用/数据源应用/数据类型应用/View更多类型将随之而来,我有点担心应用程序文件夹被这么多目录污染。因此,我想将它们移动到一个子目录/模块中,该子目录/模块包含cms定义的所有类型。所有类都应位于MyCms命名空间内,目录布局应如下所示:应用程序/my_cms/data_source应用程序/my_cms/data_ty
我正在使用ruby2.1.0我有一个json文件。例如:test.json{"item":[{"apple":1},{"banana":2}]}用YAML.load加载这个文件安全吗?YAML.load(File.read('test.json'))我正在尝试加载一个json或yaml格式的文件。 最佳答案 YAML可以加载JSONYAML.load('{"something":"test","other":4}')=>{"something"=>"test","other"=>4}JSON将无法加载YAML。JSON.load("
我认为我的问题最好用一个例子来描述。假设我有一个名为“Thing”的简单模型,它有一些简单数据类型的属性。像...Thing-foo:string-goo:string-bar:int这并不难。数据库表将包含具有这三个属性的三列,我可以使用@thing.foo或@thing.bar之类的东西访问它们。但我要解决的问题是当“foo”或“goo”不再包含在简单数据类型中时会发生什么?假设foo和goo代表相同类型的对象。也就是说,它们都是“Whazit”的实例,只是数据不同。所以现在事情可能看起来像这样......Thing-bar:int但是现在有一个新的模型叫做“Whazit”,看起来