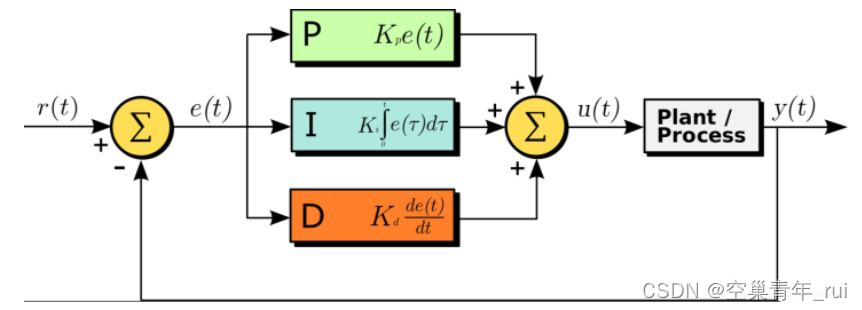
PID控制算法是工业应用中最广泛算法之一,在闭环系统的控制中,可自动对控制系统进行准确且迅速的校正。
P、I、D分别是“比例(proportional)、积分(integral)、微分(derivative)”三个单词的首字母,他们分别对应算法中使用的三个参数。
有关于PID算法的详细内容请自行查阅相关资料,参考文章。
常用的PID控制算法有位置式和增量式两种形式,下面给出他们的python实现:
位置式PID离散公式:
u
(
k
)
=
K
p
e
k
+
K
i
∑
i
=
1
k
e
(
i
)
Δ
t
+
K
d
e
(
k
)
−
e
(
k
−
1
)
Δ
t
u(k)=K_pe_k+K_i\sum_{i=1}^{k}{e(i)\Delta{t}+K_d\frac{e(k)-e(k-1)}{\Delta{t}}}
u(k)=Kpek+Ki∑i=1ke(i)Δt+KdΔte(k)−e(k−1)
位置式可以简单理解为算法每次计算得出值的都是要走到的点。如我们的目标是让一辆车前进10米,算法第一次计算得出的值是7.3,则表示车第一次运动来到了7.3米的位置。
class PositionPID(object):
"""位置式PID算法实现"""
def __init__(self, target, cur_val, dt, max, min, p, i, d) -> None:
self.dt = dt # 循环时间间隔
self._max = max # 最大输出限制,规避过冲
self._min = min # 最小输出限制
self.k_p = p # 比例系数
self.k_i = i # 积分系数
self.k_d = d # 微分系数
self.target = target # 目标值
self.cur_val = cur_val # 算法当前PID位置值,第一次为设定的初始位置
self._pre_error = 0 # t-1 时刻误差值
self._integral = 0 # 误差积分值
def calculate(self):
"""
计算t时刻PID输出值cur_val
"""
error = self.target - self.cur_val # 计算当前误差
# 比例项
p_out = self.k_p * error
# 积分项
self._integral += (error * self.dt)
i_out = self.k_i * self._integral
# 微分项
derivative = (error - self._pre_error) / self.dt
d_out = self.k_d * derivative
# t 时刻pid输出
output = p_out + i_out + d_out
# 限制输出值
if output > self._max:
output = self._max
elif output < self._min:
output = self._min
self._pre_error = error
self.cur_val = output
return self.cur_val
def fit_and_plot(self, count = 200):
"""
使用PID拟合setPoint
"""
counts = np.arange(count)
outputs = []
for i in counts:
outputs.append(self.calculate())
print('Count %3d: output: %f' % (i, outputs[-1]))
print('Done')
# print(outputs)
plt.figure()
plt.axhline(self.target, c='red')
plt.plot(counts, np.array(outputs), 'b.')
plt.ylim(min(outputs) - 0.1 * min(outputs), max(outputs) + 0.1 * max(outputs))
plt.plot(outputs)
plt.show()
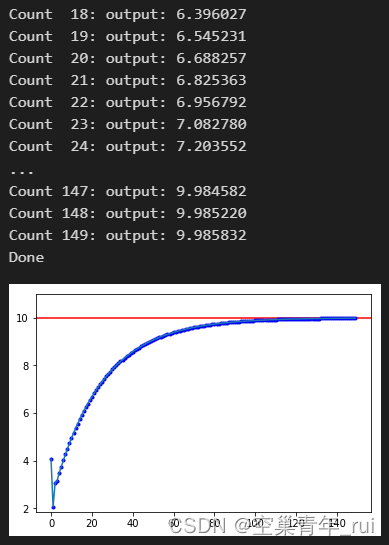
运行测试:
pid = PositionPID(10, -5, 0.5, 100, -100, 0.2, 0.1, 0.01)
pid.fit_and_plot(150)
增量式PID离散公式:
Δ
u
(
k
)
=
K
p
(
e
(
k
)
−
e
(
k
−
1
)
)
+
K
i
e
(
k
)
+
K
d
(
e
(
k
)
−
2
e
(
k
−
1
)
+
e
(
k
−
2
)
)
\Delta{u(k)}=K_p(e(k)-e(k-1))+K_ie(k)+K_d\big(e(k)-2e(k-1)+e(k-2)\big)
Δu(k)=Kp(e(k)−e(k−1))+Kie(k)+Kd(e(k)−2e(k−1)+e(k−2))
增量式可以简单理解为算法每次的计算值都是本次移动的步长。如我们的目标是让一辆车前进10米,车辆的当前位置在3米处,算法本次计算得出的值是2.5,则表示车本次需要前进2.5米,来到了5.5米的位置。
class DeltaPID(object):
"""增量式PID算法实现"""
def __init__(self, target, cur_val, dt, p, i, d) -> None:
self.dt = dt # 循环时间间隔
self.k_p = p # 比例系数
self.k_i = i # 积分系数
self.k_d = d # 微分系数
self.target = target # 目标值
self.cur_val = cur_val # 算法当前PID位置值
self._pre_error = 0 # t-1 时刻误差值
self._pre_pre_error = 0 # t-2 时刻误差值
def calcalate(self):
error = self.target - self.cur_val
p_change = self.k_p * (error - self._pre_error)
i_change = self.k_i * error
d_change = self.k_d * (error - 2 * self._pre_error + self._pre_pre_error)
delta_output = p_change + i_change + d_change # 本次增量
self.cur_val += delta_output # 计算当前位置
self._pre_pre_error = self._pre_error
self._pre_error = error
return self.cur_val
def fit_and_plot(self, count=200):
counts = np.arange(count)
outputs=[]
for i in counts:
outputs.append(self.calcalate())
print('Count %3d: output: %f' % (i, outputs[-1]))
print('Done')
plt.figure()
plt.axhline(self.target, c='red')
plt.plot(counts, np.array(outputs), 'b.')
plt.ylim(min(outputs) - 0.1 * min(outputs),
max(outputs) + 0.1 * max(outputs))
plt.plot(outputs)
plt.show()
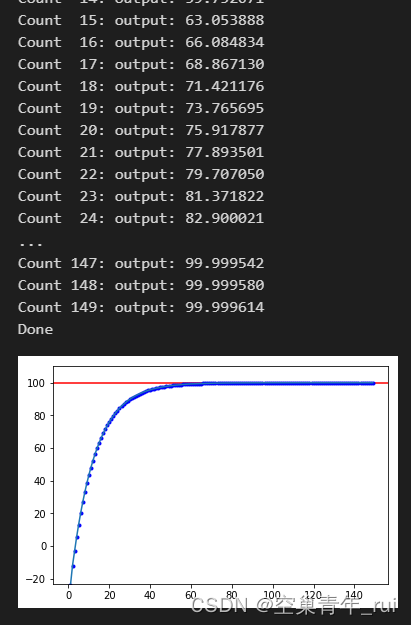
运行测试:
pid = DeltaPID(100, -80, 0.5, 0.2, 0.1, 0.001)
pid.fit_and_plot(150)
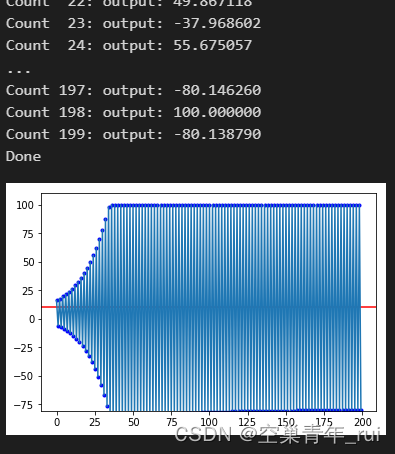
算法中P、I、D三个超参数的初始值对算法的影响很大,不合适的设置可能会导致算法不收敛。调参方法可以搜索相关资料。
如,在位置式算法中,我们使用和上面例子同样的目标值和初始值,改变参数值:
# 不合适的参数值
pid = PositionPID(10, -5, 0.5, 100, -100, 1, 0.1, 0.01)
pid.fit_and_plot()
我正在学习如何使用Nokogiri,根据这段代码我遇到了一些问题:require'rubygems'require'mechanize'post_agent=WWW::Mechanize.newpost_page=post_agent.get('http://www.vbulletin.org/forum/showthread.php?t=230708')puts"\nabsolutepathwithtbodygivesnil"putspost_page.parser.xpath('/html/body/div/div/div/div/div/table/tbody/tr/td/div
我有一个Ruby程序,它使用rubyzip压缩XML文件的目录树。gem。我的问题是文件开始变得很重,我想提高压缩级别,因为压缩时间不是问题。我在rubyzipdocumentation中找不到一种为创建的ZIP文件指定压缩级别的方法。有人知道如何更改此设置吗?是否有另一个允许指定压缩级别的Ruby库? 最佳答案 这是我通过查看rubyzip内部创建的代码。level=Zlib::BEST_COMPRESSIONZip::ZipOutputStream.open(zip_file)do|zip|Dir.glob("**/*")d
类classAprivatedeffooputs:fooendpublicdefbarputs:barendprivatedefzimputs:zimendprotecteddefdibputs:dibendendA的实例a=A.new测试a.foorescueputs:faila.barrescueputs:faila.zimrescueputs:faila.dibrescueputs:faila.gazrescueputs:fail测试输出failbarfailfailfail.发送测试[:foo,:bar,:zim,:dib,:gaz].each{|m|a.send(m)resc
很好奇,就使用rubyonrails自动化单元测试而言,你们正在做什么?您是否创建了一个脚本来在cron中运行rake作业并将结果邮寄给您?git中的预提交Hook?只是手动调用?我完全理解测试,但想知道在错误发生之前捕获错误的最佳实践是什么。让我们理所当然地认为测试本身是完美无缺的,并且可以正常工作。下一步是什么以确保他们在正确的时间将可能有害的结果传达给您? 最佳答案 不确定您到底想听什么,但是有几个级别的自动代码库控制:在处理某项功能时,您可以使用类似autotest的内容获得关于哪些有效,哪些无效的即时反馈。要确保您的提
假设我做了一个模块如下:m=Module.newdoclassCendend三个问题:除了对m的引用之外,还有什么方法可以访问C和m中的其他内容?我可以在创建匿名模块后为其命名吗(就像我输入“module...”一样)?如何在使用完匿名模块后将其删除,使其定义的常量不再存在? 最佳答案 三个答案:是的,使用ObjectSpace.此代码使c引用你的类(class)C不引用m:c=nilObjectSpace.each_object{|obj|c=objif(Class===objandobj.name=~/::C$/)}当然这取决于
我正在尝试使用ruby和Savon来使用网络服务。测试服务为http://www.webservicex.net/WS/WSDetails.aspx?WSID=9&CATID=2require'rubygems'require'savon'client=Savon::Client.new"http://www.webservicex.net/stockquote.asmx?WSDL"client.get_quotedo|soap|soap.body={:symbol=>"AAPL"}end返回SOAP异常。检查soap信封,在我看来soap请求没有正确的命名空间。任何人都可以建议我
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
我在我的项目目录中完成了compasscreate.和compassinitrails。几个问题:我已将我的.sass文件放在public/stylesheets中。这是放置它们的正确位置吗?当我运行compasswatch时,它不会自动编译这些.sass文件。我必须手动指定文件:compasswatchpublic/stylesheets/myfile.sass等。如何让它自动运行?文件ie.css、print.css和screen.css已放在stylesheets/compiled。如何在编译后不让它们重新出现的情况下删除它们?我自己编译的.sass文件编译成compiled/t
我想将html转换为纯文本。不过,我不想只删除标签,我想智能地保留尽可能多的格式。为插入换行符标签,检测段落并格式化它们等。输入非常简单,通常是格式良好的html(不是整个文档,只是一堆内容,通常没有anchor或图像)。我可以将几个正则表达式放在一起,让我达到80%,但我认为可能有一些现有的解决方案更智能。 最佳答案 首先,不要尝试为此使用正则表达式。很有可能你会想出一个脆弱/脆弱的解决方案,它会随着HTML的变化而崩溃,或者很难管理和维护。您可以使用Nokogiri快速解析HTML并提取文本:require'nokogiri'h
我想为Heroku构建一个Rails3应用程序。他们使用Postgres作为他们的数据库,所以我通过MacPorts安装了postgres9.0。现在我需要一个postgresgem并且共识是出于性能原因你想要pggem。但是我对我得到的错误感到非常困惑当我尝试在rvm下通过geminstall安装pg时。我已经非常明确地指定了所有postgres目录的位置可以找到但仍然无法完成安装:$envARCHFLAGS='-archx86_64'geminstallpg--\--with-pg-config=/opt/local/var/db/postgresql90/defaultdb/po