制作一个智能循迹或者避障小车往往需要到驱动,而对于小白来说我们常用到的驱动往往为l298n和tb6612,这里就介绍常用l298n驱动的使用方法,仅供新手小白快速学习上手使用l298n驱动。
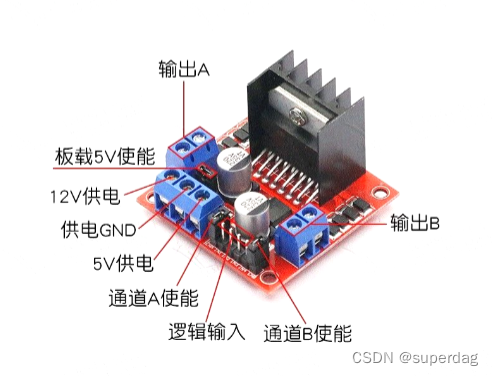
如图所示(该图来自淘宝商家图片)
1、输出A接电机的正负极,输出B同理,如若正负极接反会使电机反转。如果为4轮小车,可以左边两个轮子串联在一起,当作一个轮子。右边同理。
2、板载5v使能的跳线帽要接上,一般在商家买回来的l298n模块都是接上了的
3、12v供电接电源的正极!供电GND(可以暂时简单理解为负极或者接地)接电源的负极!切记勿接错,接错l298n模块很容易烧毁的!
4、5v供电,可输出5v的电压,如果降压模块有限,可以使用它来给单片机供电,可以接到单片的 5v供电中,但切记一定要在单片机的GND上接回到l298n的GND上,也就是说如果你用l298n 的5v给单片机供电,在上图的(供电GND)中就要接两条线,一条是电源负极,一条是单片机 GND。
5、逻辑输入,这里有4个接线排针,从左到右为IN1 IN2 IN3 IN4,左边两个对应左边输出A,有边两个对应右边输出B,接到单片机的IO口上,如果IN1设置为高电平,IN2设置为低电平左边的电机正转,反之若IN1为低电平,IN2为高电平则反转。同理可知,IN3为高电平,IN4为低电平为右边电机正转,反之,IN3低,IN4高为反转。设置IN为高低电平可通过单片机代码设置IO口的高低来实现,如若是测试电机是否坏,可直接短接3.3v电源与GND,电机会转。
6、通道A使能和通道B使能,这里可以把跳线帽拔了(购买时是插着的)接到单片机代码配置的pwm通道上,用来输出pwm波。如果还没学到可以去学一下pwm波的输出,这里就不多讲了。pwm可以用来控制电机的运行速度。跳线帽拔了接一条线就行,比如左边跳线帽拔了接下面代码配置的PA0就行。右边同理。
7、最后是小博主的最后一点提醒,这个模块对新手很容易烧坏!如果是新手小白,在接电前一定要注意接线是否接对,特别是GND那里。(希望看到这篇文章的你不会烧(手动狗头))
电机初始化io口部分,不要一味地复制粘贴喔,首先还是要理解代码意思的。
void Motor_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;//定义一个结构体变量GPIO_InitStructure
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//使能时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;//确定哪一个io口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;//设置为推挽输出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;//io口速度为50hz
GPIO_Init(GPIOB,&GPIO_InitStructure);//GPIOB.12初始化函数
}pwm部分
//PWM输出初始化
//arr:自动重装值 899 //可在函数声明写入口参数
//psc:时钟预分频数 0
void TIM2_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);// APB1,TIM2
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能
//设置该引脚为复用输出功能,输出TIM2 CH1的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1; //TIM_CH1 TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80K
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM2, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_OC2Init(TIM2, &TIM_OCInitStructure);
TIM_CtrlPWMOutputs(TIM2,ENABLE); //MOE 主输出使能
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable); //CH1预装载使能
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable); //CH2预装载使能
TIM_ARRPreloadConfig(TIM2, ENABLE); //使能TIMx在ARR上的预装载寄存器
TIM_Cmd(TIM2, ENABLE); //使能TIM2
}
最后差不多了,关注博主,以简单粗暴的方式分享学习,欢迎批评改正,如有侵权联系删除。
我正在学习如何使用Nokogiri,根据这段代码我遇到了一些问题:require'rubygems'require'mechanize'post_agent=WWW::Mechanize.newpost_page=post_agent.get('http://www.vbulletin.org/forum/showthread.php?t=230708')puts"\nabsolutepathwithtbodygivesnil"putspost_page.parser.xpath('/html/body/div/div/div/div/div/table/tbody/tr/td/div
类classAprivatedeffooputs:fooendpublicdefbarputs:barendprivatedefzimputs:zimendprotecteddefdibputs:dibendendA的实例a=A.new测试a.foorescueputs:faila.barrescueputs:faila.zimrescueputs:faila.dibrescueputs:faila.gazrescueputs:fail测试输出failbarfailfailfail.发送测试[:foo,:bar,:zim,:dib,:gaz].each{|m|a.send(m)resc
设置:狂欢ruby1.9.2高线(1.6.13)描述:我已经相当习惯在其他一些项目中使用highline,但已经有几个月没有使用它了。现在,在Ruby1.9.2上全新安装时,它似乎不允许在同一行回答提示。所以以前我会看到类似的东西:require"highline/import"ask"Whatisyourfavoritecolor?"并得到:Whatisyourfavoritecolor?|现在我看到类似的东西:Whatisyourfavoritecolor?|竖线(|)符号是我的终端光标。知道为什么会发生这种变化吗? 最佳答案
两者都可以defsetup(options={})options.reverse_merge:size=>25,:velocity=>10end和defsetup(options={}){:size=>25,:velocity=>10}.merge(options)end在方法的参数中分配默认值。问题是:哪个更好?您更愿意使用哪一个?在性能、代码可读性或其他方面有什么不同吗?编辑:我无意中添加了bang(!)...并不是要询问nobang方法与bang方法之间的区别 最佳答案 我倾向于使用reverse_merge方法:option
我一直致力于让我们的Rails2.3.8应用程序在JRuby下正确运行。一切正常,直到我启用config.threadsafe!以实现JRuby提供的并发性。这导致lib/中的模块和类不再自动加载。使用config.threadsafe!启用:$rubyscript/runner-eproduction'pSim::Sim200Provisioner'/Users/amchale/.rvm/gems/jruby-1.5.1@web-services/gems/activesupport-2.3.8/lib/active_support/dependencies.rb:105:in`co
我收到格式为的回复#我需要将其转换为哈希值(针对活跃商家)。目前我正在遍历变量并执行此操作:response.instance_variables.eachdo|r|my_hash.merge!(r.to_s.delete("@").intern=>response.instance_eval(r.to_s.delete("@")))end这有效,它将生成{:first="charlie",:last=>"kelly"},但它似乎有点hacky和不稳定。有更好的方法吗?编辑:我刚刚意识到我可以使用instance_variable_get作为该等式的第二部分,但这仍然是主要问题。
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
我的工作要求我为某些测试自动生成电子邮件。我一直在四处寻找,但未能找到可以快速实现的合理解决方案。它需要在outlook而不是其他邮件服务器中,因为我们有一些奇怪的身份验证规则,我们需要保存草稿而不是仅仅发送邮件的选项。显然win32ole可以做到这一点,但我找不到任何相当简单的例子。 最佳答案 假设存储了Outlook凭据并且您设置为自动登录到Outlook,WIN32OLE可以很好地完成此操作:require'win32ole'outlook=WIN32OLE.new('Outlook.Application')message=
如何将send与+=一起使用?a=20;a.send"+=",10undefinedmethod`+='for20:Fixnuma=20;a+=10=>30 最佳答案 恐怕你不能。+=不是方法,而是语法糖。参见http://www.ruby-doc.org/docs/ProgrammingRuby/html/tut_expressions.html它说Incommonwithmanyotherlanguages,Rubyhasasyntacticshortcut:a=a+2maybewrittenasa+=2.你能做的最好的事情是:
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit