需要源码请点赞关注收藏后评论区留言~~~
顾名思义,指南针只要找到朝南的方向就好了。 可是在App中并非使用一个方向传感器这么简单,事实上单独的方向传感器已经弃用,取而代之的是利用加速度传感器和磁场传感器。 获得加速度和磁场强度两个数值之后,再通过SensorManager的getRotationMatrix方法与getOrientation方法计算方向角度。
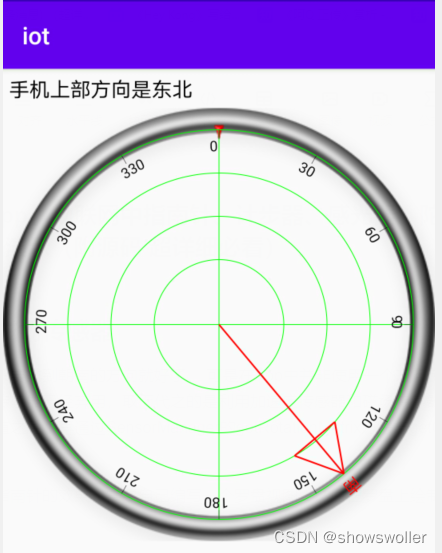
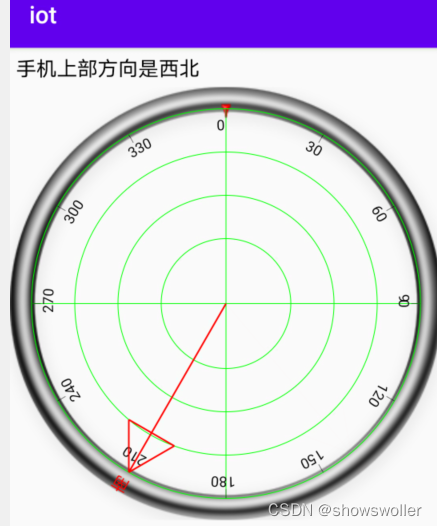
要想在手机上模拟指南针的效果,需要自己编写一个罗盘视图,然后在罗盘上绘制正南方向的指针效果如下 晃动手机头部即会显示不同方向
代码如下
package com.example.iot;
import android.content.Context;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Bundle;
import android.view.View;
import android.widget.TextView;
import androidx.appcompat.app.AppCompatActivity;
import com.example.iot.widget.CompassView;
import java.util.List;
public class DirectionActivity extends AppCompatActivity implements SensorEventListener {
private TextView tv_direction; // 声明一个文本视图对象
private CompassView cv_sourth; // 声明一个罗盘视图对象
private SensorManager mSensorMgr;// 声明一个传感管理器对象
private float[] mAcceValues; // 加速度变更值的数组
private float[] mMagnValues; // 磁场强度变更值的数组
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_direction);
tv_direction = findViewById(R.id.tv_direction);
cv_sourth = findViewById(R.id.cv_sourth);
// 从系统服务中获取传感管理器对象
mSensorMgr = (SensorManager) getSystemService(Context.SENSOR_SERVICE);
}
@Override
protected void onPause() {
super.onPause();
mSensorMgr.unregisterListener(this); // 注销当前活动的传感监听器
}
@Override
protected void onResume() {
super.onResume();
int suitable = 0;
// 获取当前设备支持的传感器列表
List<Sensor> sensorList = mSensorMgr.getSensorList(Sensor.TYPE_ALL);
for (Sensor sensor : sensorList) {
if (sensor.getType() == Sensor.TYPE_ACCELEROMETER) { // 找到加速度传感器
suitable += 1; // 找到加速度传感器
} else if (sensor.getType() == Sensor.TYPE_MAGNETIC_FIELD) { // 找到磁场传感器
suitable += 10; // 找到磁场传感器
}
}
if (suitable / 10 > 0 && suitable % 10 > 0) {
// 给加速度传感器注册传感监听器
mSensorMgr.registerListener(this,
mSensorMgr.getDefaultSensor(Sensor.TYPE_ACCELEROMETER),
SensorManager.SENSOR_DELAY_NORMAL);
// 给磁场传感器注册传感监听器
mSensorMgr.registerListener(this,
mSensorMgr.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD),
SensorManager.SENSOR_DELAY_NORMAL);
} else {
cv_sourth.setVisibility(View.GONE);
tv_direction.setText("当前设备不支持指南针,请检查是否存在加速度和磁场传感器");
}
}
@Override
public void onSensorChanged(SensorEvent event) {
if (event.sensor.getType() == Sensor.TYPE_ACCELEROMETER) { // 加速度变更事件
mAcceValues = event.values; // 加速度变更事件
} else if (event.sensor.getType() == Sensor.TYPE_MAGNETIC_FIELD) { // 磁场强度变更事件
mMagnValues = event.values; // 磁场强度变更事件
}
if (mAcceValues != null && mMagnValues != null) {
calculateOrientation(); // 加速度和磁场强度两个都有了,才能计算磁极的方向
}
}
//当传感器精度改变时回调该方法,一般无需处理
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {}
// 计算指南针的方向
private void calculateOrientation() {
float[] values = new float[3];
float[] R = new float[9];
SensorManager.getRotationMatrix(R, null, mAcceValues, mMagnValues);
SensorManager.getOrientation(R, values);
values[0] = (float) Math.toDegrees(values[0]); // 计算手机上部与正北方向的夹角
cv_sourth.setDirection((int) values[0]); // 设置罗盘视图中的指南针方向
if (values[0] >= -10 && values[0] < 10) {
tv_direction.setText("手机上部方向是正北");
} else if (values[0] >= 10 && values[0] < 80) {
tv_direction.setText("手机上部方向是东北");
} else if (values[0] >= 80 && values[0] <= 100) {
tv_direction.setText("手机上部方向是正东");
} else if (values[0] >= 100 && values[0] < 170) {
tv_direction.setText("手机上部方向是东南");
} else if ((values[0] >= 170 && values[0] <= 180)
|| (values[0]) >= -180 && values[0] < -170) {
tv_direction.setText("手机上部方向是正南");
} else if (values[0] >= -170 && values[0] < -100) {
tv_direction.setText("手机上部方向是西南");
} else if (values[0] >= -100 && values[0] < -80) {
tv_direction.setText("手机上部方向是正西");
} else if (values[0] >= -80 && values[0] < -10) {
tv_direction.setText("手机上部方向是西北");
}
}
}
计步器的原理是通过手机的前后摆动模拟步伐节奏的监测。Android中与计步器有关的传感器有两个。
(1)一个是步行检测(TYPE_STEP_DETECTOR) 步行检测的返回数值为1时,表示当前监测到一个步伐;
(2)另一个是步行计数(TYPE_STEP_ COUNTER) 步行计数的返回数值是累加后的数值,表示本次开机激活后的总步伐数。
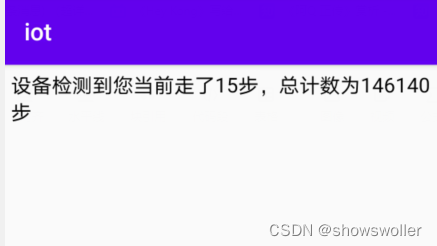
效果如下 随着走路上面的计数会发生对应的变化
代码如下
package com.example.iot;
import android.annotation.SuppressLint;
import android.content.Context;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Bundle;
import android.widget.TextView;
import androidx.appcompat.app.AppCompatActivity;
import java.util.List;
@SuppressLint("DefaultLocale")
public class StepActivity extends AppCompatActivity implements SensorEventListener {
private TextView tv_step; // 声明一个文本视图对象
private SensorManager mSensorMgr; // 声明一个传感管理器对象
private int mStepDetector = 0; // 累加的步行检测次数
private int mStepCounter = 0; // 计步器统计的步伐数目
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_step);
tv_step = findViewById(R.id.tv_step);
initStepSensor(); // 初始化步行传感器
}
// 初始化步行传感器
private void initStepSensor() {
// 从系统服务中获取传感管理器对象
mSensorMgr = (SensorManager) getSystemService(Context.SENSOR_SERVICE);
int suitable = 0;
// 获取当前设备支持的传感器列表
List<Sensor> sensorList = mSensorMgr.getSensorList(Sensor.TYPE_ALL);
for (Sensor sensor : sensorList) {
if (sensor.getType() == Sensor.TYPE_STEP_DETECTOR) { // 找到步行检测传感器
suitable += 1;
// 给步行检测传感器注册传感监听器
mSensorMgr.registerListener(this,
mSensorMgr.getDefaultSensor(Sensor.TYPE_STEP_DETECTOR),
SensorManager.SENSOR_DELAY_NORMAL);
} else if (sensor.getType() == Sensor.TYPE_STEP_COUNTER) { // 找到计步器
suitable += 10;
// 给计步器注册传感监听器
mSensorMgr.registerListener(this,
mSensorMgr.getDefaultSensor(Sensor.TYPE_STEP_COUNTER),
SensorManager.SENSOR_DELAY_NORMAL);
}
}
if (suitable == 0) {
tv_step.setText("当前设备不支持计步器,请检查是否存在步行检测传感器和计步器");
}
}
@Override
protected void onDestroy() {
super.onDestroy();
mSensorMgr.unregisterListener(this); // 注销当前活动的传感监听器
}
@Override
public void onSensorChanged(SensorEvent event) {
if (event.sensor.getType() == Sensor.TYPE_STEP_DETECTOR) { // 步行检测事件
if (event.values[0] == 1.0f) {
mStepDetector++; // 步行检测事件
}
} else if (event.sensor.getType() == Sensor.TYPE_STEP_COUNTER) { // 计步器事件
mStepCounter = (int) event.values[0]; // 计步器事件
}
String desc = String.format("设备检测到您当前走了%d步,总计数为%d步",
mStepDetector, mStepCounter);
tv_step.setText(desc);
}
//当传感器精度改变时回调该方法,一般无需处理
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {}
}
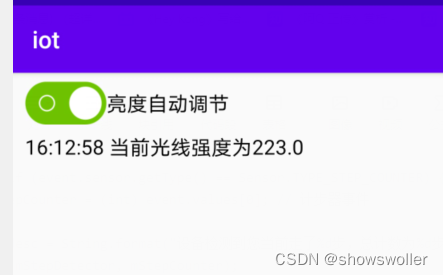
感光器也叫光线传感器,借助于前置摄像头的曝光,一旦遮住前置摄像头,传感器监测到的光线强度立马就会降低。 在实际开发中,光线传感器往往用于感应手机正面的光线强弱,从而自动调节屏幕亮度
摄像头没有被遮挡前数值如下
被遮挡后数值如下
代码如下
package com.example.iot;
import android.annotation.SuppressLint;
import android.content.Context;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Build;
import android.os.Bundle;
import android.widget.CheckBox;
import android.widget.CompoundButton;
import android.widget.CompoundButton.OnCheckedChangeListener;
import android.widget.TextView;
import androidx.appcompat.app.AppCompatActivity;
import com.example.iot.util.DateUtil;
import com.example.iot.util.SwitchUtil;
@SuppressLint(value={"DefaultLocale","SetTextI18n"})
public class LightActivity extends AppCompatActivity implements SensorEventListener {
private TextView tv_light; // 声明一个文本视图对象
private SensorManager mSensorMgr; // 声明一个传感管理器对象
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_light);
CheckBox ck_bright = findViewById(R.id.ck_bright);
// 检查屏幕亮度是否为自动调节
if (SwitchUtil.getAutoBrightStatus(this)) {
ck_bright.setChecked(true);
}
// Android8.0之后普通应用不允许修改系统设置
if (Build.VERSION.SDK_INT < Build.VERSION_CODES.O) {
ck_bright.setOnCheckedChangeListener((buttonView, isChecked) -> {
// 设置是否开启屏幕亮度的自动调节
SwitchUtil.setAutoBrightStatus(this, isChecked);
});
} else {
ck_bright.setEnabled(false);
}
tv_light = findViewById(R.id.tv_light);
// 从系统服务中获取传感管理器对象
mSensorMgr = (SensorManager) getSystemService(Context.SENSOR_SERVICE);
}
@Override
protected void onPause() {
super.onPause();
mSensorMgr.unregisterListener(this); // 注销当前活动的传感监听器
}
@Override
protected void onResume() {
super.onResume();
// 给光线传感器注册传感监听器
mSensorMgr.registerListener(this, mSensorMgr.getDefaultSensor(Sensor.TYPE_LIGHT),
SensorManager.SENSOR_DELAY_NORMAL);
}
@Override
public void onSensorChanged(SensorEvent event) {
if (event.sensor.getType() == Sensor.TYPE_LIGHT) { // 光线强度变更事件
float light_strength = event.values[0];
tv_light.setText(DateUtil.getNowTime() + " 当前光线强度为" + light_strength);
}
}
//当传感器精度改变时回调该方法,一般无需处理
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {}
}
陀螺仪是测量平衡的仪器,它的测量结果为当前与上次位置之间的倾斜角度,这个角度描述的是三维空间上的夹角,因而其数值由x、y、z三个坐标轴上的角度偏移组成。 由于陀螺仪具备三维角度的测量功能,因此它又被称作角速度传感器。 加速度传感器只能检测线性距离的大小,而陀螺仪能够检测旋转角度的大小,所以利用陀螺仪可以还原三维物体的转动行为。
运行测试效果如下 随着手机的转动示数会跟着变化
代码如下
package com.example.iot;
import android.annotation.SuppressLint;
import android.content.Context;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Bundle;
import android.widget.TextView;
import androidx.appcompat.app.AppCompatActivity;
import com.example.iot.util.DateUtil;
import java.util.List;
@SuppressLint("DefaultLocale")
public class GyroscopeActivity extends AppCompatActivity implements SensorEventListener {
private static final float NS2S = 1.0f / 1000000000.0f; // 将纳秒转化为秒
private TextView tv_gyroscope; // 声明一个文本视图对象
private SensorManager mSensorMgr; // 声明一个传感管理器对象
private float mTimestamp; // 记录上次的时间戳
private float mAngle[] = new float[3]; // 记录xyz三个方向上的旋转角度
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_gyroscope);
tv_gyroscope = findViewById(R.id.tv_gyroscope);
// 从系统服务中获取传感管理器对象
mSensorMgr = (SensorManager) getSystemService(Context.SENSOR_SERVICE);
}
@Override
protected void onPause() {
super.onPause();
mSensorMgr.unregisterListener(this); // 注销当前活动的传感监听器
}
@Override
protected void onResume() {
super.onResume();
// 获取当前设备支持的传感器列表
List<Sensor> sensorList = mSensorMgr.getSensorList(Sensor.TYPE_ALL);
boolean isSuitable = false;
for (Sensor sensor : sensorList) {
if (sensor.getType() == Sensor.TYPE_GYROSCOPE) { // 找到陀螺仪
isSuitable = true;
break;
}
}
if (isSuitable) { // 找到了陀螺仪
// 给陀螺仪传感器注册传感监听器
mSensorMgr.registerListener(this,
mSensorMgr.getDefaultSensor(Sensor.TYPE_GYROSCOPE),
SensorManager.SENSOR_DELAY_FASTEST);
} else { // 未找到陀螺仪
tv_gyroscope.setText("当前设备不支持陀螺仪,请检查是否存在陀螺仪传感器");
}
}
@Override
public void onSensorChanged(SensorEvent event) {
if (event.sensor.getType() == Sensor.TYPE_GYROSCOPE) { // 陀螺仪角度变更事件
if (mTimestamp != 0) {
final float dT = (event.timestamp - mTimestamp) * NS2S;
mAngle[0] += event.values[0] * dT;
mAngle[1] += event.values[1] * dT;
mAngle[2] += event.values[2] * dT;
// x轴的旋转角度,手机平放桌上,然后绕侧边转动
float angleX = (float) Math.toDegrees(mAngle[0]);
// y轴的旋转角度,手机平放桌上,然后绕底边转动
float angleY = (float) Math.toDegrees(mAngle[1]);
// z轴的旋转角度,手机平放桌上,然后水平旋转
float angleZ = (float) Math.toDegrees(mAngle[2]);
String desc = String.format("%s 陀螺仪检测到当前位置为:\n" +
"x轴方向的转动角度为%.6f,\n" +
"y轴方向的转动角度为%.6f,\n" +
"z轴方向的转动角度为%.6f。",
DateUtil.getNowTime(), angleX, angleY, angleZ);
tv_gyroscope.setText(desc);
}
mTimestamp = event.timestamp;
}
}
//当传感器精度改变时回调该方法,一般无需处理
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {}
}
创作不易 觉得有帮助请点赞关注收藏~~~
我安装了ruby、yeoman,当我运行我的项目时,出现了这个错误:Warning:Running"compass:dist"(compass)taskWarning:YouneedtohaveRubyandCompassinstalledthistasktowork.Moreinfo:https://github.com/gruUse--forcetocontinue.Use--forcetocontinue.我有进入可变session目标的路径,但它不起作用。谁能帮帮我? 最佳答案 我必须运行这个:geminstallcom
一、什么是MQTT协议MessageQueuingTelemetryTransport:消息队列遥测传输协议。是一种基于客户端-服务端的发布/订阅模式。与HTTP一样,基于TCP/IP协议之上的通讯协议,提供有序、无损、双向连接,由IBM(蓝色巨人)发布。原理:(1)MQTT协议身份和消息格式有三种身份:发布者(Publish)、代理(Broker)(服务器)、订阅者(Subscribe)。其中,消息的发布者和订阅者都是客户端,消息代理是服务器,消息发布者可以同时是订阅者。MQTT传输的消息分为:主题(Topic)和负载(payload)两部分Topic,可以理解为消息的类型,订阅者订阅(Su
我不是Ruby专家,但想弄清楚发生了什么,因为我试图让指南针在节点应用程序中工作,但我的Ruby似乎坏了。打字:ruby--version让我:ruby2.1.1p76(2014-02-24revision45161)[x86_64-darwin13.0]我安装了Homebrew,之前遇到过Ruby版本的问题,但它似乎已安装并且可以正常工作。但是,当我使用gem输入请求时,出现此错误:$gem-hErrorloadingRubyGemsplugin"/Users/user_dir/.rvm/gems/ruby-2.1.1@global/gems/executable-hooks-1.3
我有一个类方法,我想在其中修改当前由ActiveRecord::Relation对象抓取的记录。但是我不知道如何在类方法中引用当前范围。self不会这样做。例子:classUser我会这样使用它:User.some_scope.modify_those_records所以User.some_scope会返回给我一个ActiveRecord::Relation,其中包含一堆User记录。然后我想在该类方法中修改这些记录,然后返回它们。问题是:我不知道如何在类方法中明确引用“那组记录”。 最佳答案 您可以使用current_scope:
我有一个名为yearly_csv的操作。在此操作中,我执行两个操作,如需求和供应。defyearly_csvifdemand=='true'demand_csvelsesupply_csvendend我的View中有两个单选按钮来选择其中一个操作。现在我想在RSpec中单独测试每个操作。例如,一个供应规范和另一个需求规范。我的问题是如何将单选按钮值传递给yearly_csv操作(get)? 最佳答案 在RSpec的较新版本中,您必须使用params键声明查询字符串参数:get:yearly_csv,params:{demand:'t
示例代码:#typed:trueclassKeyGettersig{params(env_var_name:String).returns(KeyGetter)}defself.from_env_var(env_var_name)returnNull.newifenv_var_name.nil?returnnew(env_var_name)enddefinitialize(env_var_name)@env_var_name=env_var_nameenddefto_key"keyfrom#{@env_var_name}"enddefto_s"strfrom#{@env_var_nam
文章目录1简介2绪论2.1课题背景与目的3系统设计详细设计描述3.2硬件部分温度测量电路其他电路部分3.3软件部分主程序子系统程序温湿度程序流程键盘显示子程序3.4实现效果3.5部分相关代码4最后1简介Hi,大家好,这里是丹成学长,今天向大家介绍一个单片机项目基于单片机的智能温控农业大棚系统大家可用于课程设计或毕业设计单片机-嵌入式毕设选题大全及项目分享:https://blog.csdn.net/m0_71572576/article/details/1254090522绪论2.1课题背景与目的近年来我国的温室控制取得了长足的进步,首先在温室群控制方面,进行了初步的探索和理论研究,其次在温室
我有3个表PostText、PostImage和PostVideo。现在,我将上述所有三个表中的数据合并到一个名为userposts的数组中。现在从userposts我只想访问从偏移量15开始的10条记录。我该怎么做?我尝试了userposts.first(10)。它给了我前10条记录,但我想要从offset-15开始的10条记录。提前致谢。 最佳答案 userposts.drop(15).first(10)会帮助你 关于ruby-on-rails-如何在rails中的数组中指定限制和偏
我正在尝试通过mongoid.yml进行身份验证,但我想要进行身份验证的用户在admin数据库中。如果我尝试在数据库字段中指定管理数据库,它也会将所有集合放在那里,我不希望这样。有没有办法将我的数据库字段设置为我想要的数据库,但指定一个单独的身份验证数据库?这是我的mongoid.yml文件development:sessions:default:database:XC_DEVhosts:-IP:PORTusername:userpassword:password 最佳答案 这个问题已经存在一年多了,但值得回答。是的,auth_so
我想解析public文件夹中的.csv文件,我试过/../的,#{RAILS_ROOT}/public但没有成功(没有这样的文件或目录错误)。我不知道如何使用Rails.public_path(Rails.public_path/filename.csv不起作用)请帮助 最佳答案 您可以访问Rails.root路径,使用它来获取路径Rails.root.join("public","filename.csv")您可能需要调用to_s,具体取决于您希望如何使用结果(作为Path对象或作为字符串)。