大家好,我是虎哥,从今天开始,我将花一段时间,开始将自己从ROS1切换到ROS2,做为有别于ROS1的版本,做了很多更新和改变,我还是很期待自己逐步去探索ROS2中的惊喜。在安装过程中我也遇到的一些坑,我自己也尝试填了一部分,未必是全部,但是相信集合大家发布的各种安装教程,你也可以顺利安装。接下来开始我们的ROS初步探索吧。
目录
1、查看环境变量printenv | grep -i ROS
开始安装

 需要等待系统安装完毕。
需要等待系统安装完毕。

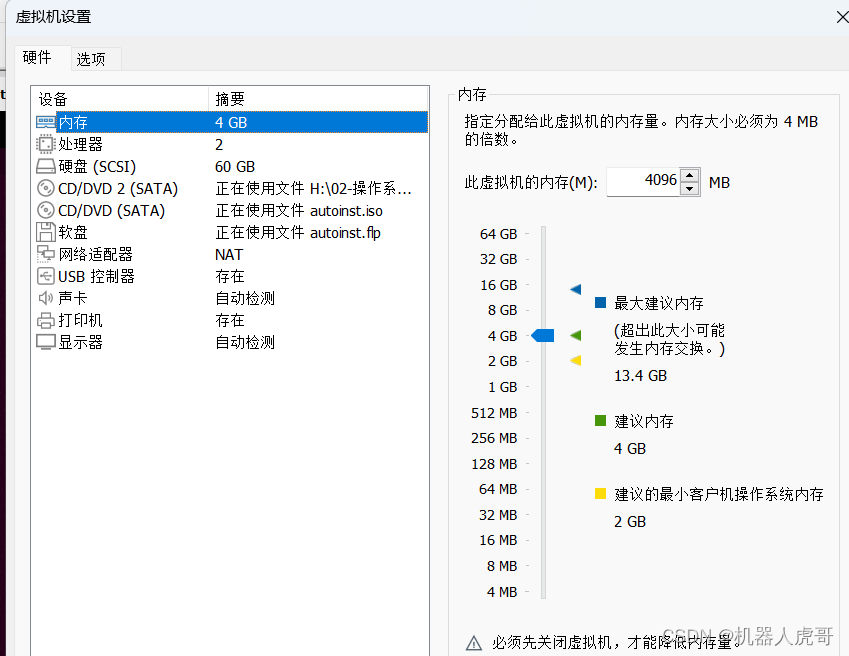
我虚拟机硬件配置为:
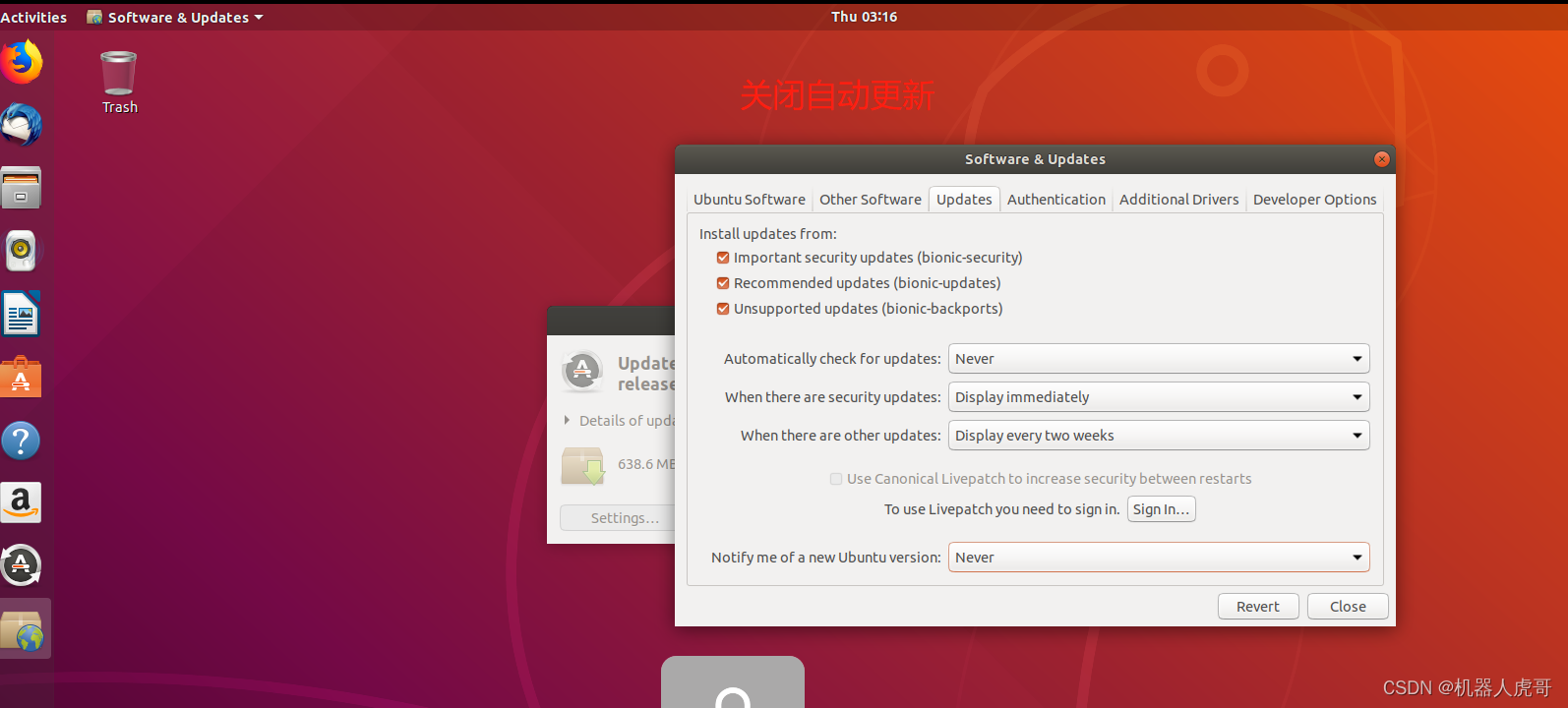
关闭自动更新
确认系统版本

#更新
sudo apt-get update#更换源
sudo apt-get install -y wget
sudo apt-get install apt-transport-https -y
#18.04
sudo cp -a /etc/apt/sources.list /etc/apt/sources.list.bak
#华为源 18.04
sudo sed -i "s@http://.*archive.ubuntu.com@http://repo.huaweicloud.com@g" /etc/apt/sources.list
sudo sed -i "s@http://.*security.ubuntu.com@http://repo.huaweicloud.com@g" /etc/apt/sources.list
sudo apt-get update
还有报错,这个是华为源的BUG,可以先不用理。
#安装常用工具组件
sudo apt-get install -y \
vim \
lrzsz \
curl 官网教程入口:ROS 2 Eloquent Elusor Installation — ROS 2 Documentation: Eloquent documentation
我们综合一下,国内的教程和官方教程,亲自测试了如下教程
sudo apt update && sudo apt install curl gnupg2 lsb-release
#这句不好用,网上找了另外一条
#curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
curl http://repo.ros2.org/repos.key | sudo apt-key add -
sudo sh -c 'echo "deb [arch=amd64] http://packages.ros.org/ros2/ubuntu bionic main" > /etc/apt/sources.list.d/ros2-latest.list'

sudo apt update
sudo apt install ros-eloquent-desktop
开始漫长等待

注意,你的网还是好一点,就少出点问题,我之前切换到了我手机热点上。

下载完后就开始安装了。
安装完毕。
sudo apt install -y libpython3-dev python3-pip
pip3 install -U argcomplete安装RMW implementation(跳过 体积太大,费时间)
sudo apt update
sudo apt install ros-eloquent-rmw-connext-cpp
echo "source /opt/ros/eloquent/setup.bash" >> ~/.bashrc
source ~/.bashrcecho "ros melodic(1) or ros2 dashing(2)?"
read edition
if [ "$edition" -eq "1" ];then
source /opt/ros/melodic/setup.bash
#在这里继续添加source ROS1的工作空间
else
source /opt/ros/eloquent/setup.bash
#source ~/ros2_ws/install/local_setup.bash
fi
推荐内容sudo pip3 install rosdepc
sudo rosdepc init
rosdepc update
 如果出现如下错误:
如果出现如下错误:
sudo rosdep fix-permissionssudo apt-get install python3-colcon-rosprintenv | grep -i ROS
LD_LIBRARY_PATH=/opt/ros/eloquent/opt/yaml_cpp_vendor/lib:/opt/ros/eloquent/opt/rviz_ogre_vendor/lib:/opt/ros/eloquent/lib/x86_64-linux-gnu:/opt/ros/eloquent/lib
AMENT_PREFIX_PATH=/opt/ros/eloquent
ROS_VERSION=2
ROS_LOCALHOST_ONLY=0
ROS_PYTHON_VERSION=3
PYTHONPATH=/opt/ros/eloquent/lib/python3.6/site-packages
PATH=/opt/ros/eloquent/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/usr/local/games:/snap/bin
ROS_DISTRO=eloquentInstall the turtlesim package for your ROS 2 distro:
sudo apt update
sudo apt install ros-eloquent-turtlesimCheck that the package installed:
ros2 pkg executables turtlesim
To start turtlesim, enter the following command in your terminal:
ros2 run turtlesim turtlesim_node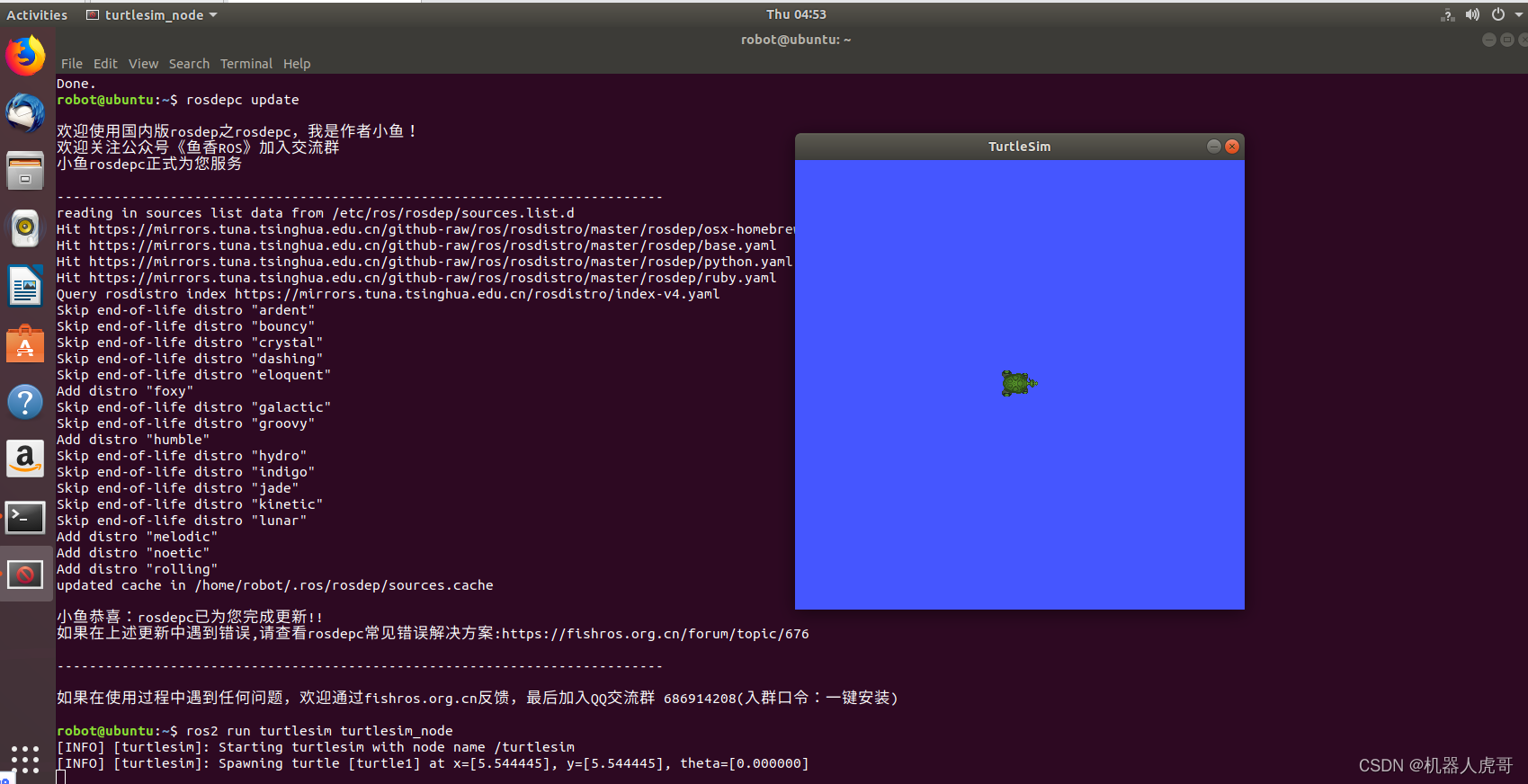
新开一个窗口
ros2 run turtlesim turtle_teleop_key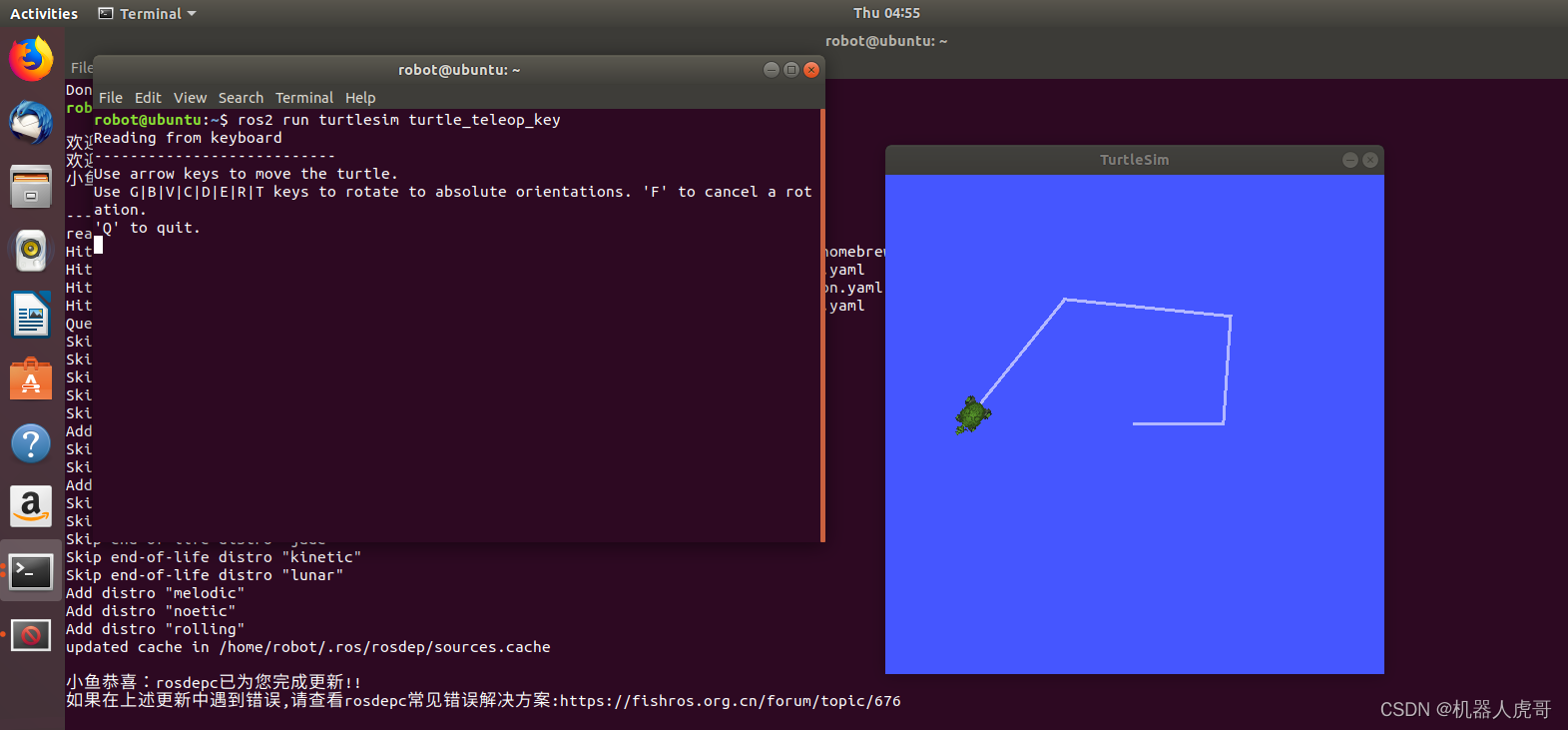
使用键盘前后左右键就可以控制小乌龟运动了。感觉很亲切。
在打开一个窗口,依次使用下面命令,和ROS1下就很多类似。
ros2 node list
ros2 topic list
ros2 service list
ros2 action list打印输出:
ros2 node list
/teleop_turtle
/turtlesim
ros2 topic list
/parameter_events
/rosout
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
ros2 service list
/clear
/kill
/reset
/spawn
/teleop_turtle/describe_parameters
/teleop_turtle/get_parameter_types
/teleop_turtle/get_parameters
/teleop_turtle/list_parameters
/teleop_turtle/set_parameters
/teleop_turtle/set_parameters_atomically
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative
/turtlesim/describe_parameters
/turtlesim/get_parameter_types
/turtlesim/get_parameters
/turtlesim/list_parameters
/turtlesim/set_parameters
/turtlesim/set_parameters_atomically
ros2 action list
/turtle1/rotate_absolute开一个终端执行
ros2 run demo_nodes_cpp talker开另外一个终端执行
ros2 run demo_nodes_py listener
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/srcros2 pkg create --build-type ament_cmake testcpp # c++功能包
ros2 pkg create --build-type ament_python testpython # python功能包这里与ros1有区别,创建功能包需要指定语言
robot@ubuntu:~/ros2_ws/src$ ros2 pkg create --build-type ament_python testpython
going to create a new package
package name: testpython
destination directory: /home/robot/ros2_ws/src
package format: 3
version: 0.0.0
description: TODO: Package description
maintainer: ['robot <robot@todo.todo>']
licenses: ['TODO: License declaration']
build type: ament_python
dependencies: []
creating folder ./testpython
creating ./testpython/package.xml
creating source folder
creating folder ./testpython/testpython
creating ./testpython/setup.py
creating ./testpython/setup.cfg
creating folder ./testpython/resource
creating ./testpython/resource/testpython
creating ./testpython/testpython/__init__.py
creating folder ./testpython/test
creating ./testpython/test/test_copyright.py
creating ./testpython/test/test_flake8.py
creating ./testpython/test/test_pep257.py
robot@ubuntu:~/ros2_ws/src$ ros2 pkg create --build-type ament_cmake testcpp
going to create a new package
package name: testcpp
destination directory: /home/robot/ros2_ws/src
package format: 3
version: 0.0.0
description: TODO: Package description
maintainer: ['robot <robot@todo.todo>']
licenses: ['TODO: License declaration']
build type: ament_cmake
dependencies: []
creating folder ./testcpp
creating ./testcpp/package.xml
creating source and include folder
creating folder ./testcpp/src
creating folder ./testcpp/include/testcpp
creating ./testcpp/CMakeLists.txtcd ~/ros2_ws/
colcon build
纠错,疑问,交流: 911946883@qq.com
我正在使用i18n从头开始构建一个多语言网络应用程序,虽然我自己可以处理一大堆yml文件,但我说的语言(非常)有限,最终我想寻求外部帮助帮助。我想知道这里是否有人在使用UI插件/gem(与django上的django-rosetta不同)来处理多个翻译器,其中一些翻译器不愿意或无法处理存储库中的100多个文件,处理语言数据。谢谢&问候,安德拉斯(如果您已经在rubyonrails-talk上遇到了这个问题,我们深表歉意) 最佳答案 有一个rails3branchofthetolkgem在github上。您可以通过在Gemfi
我看到这个错误:translationmissing:da.datetime.distance_in_words.about_x_hours我的语言环境文件:http://pastie.org/2944890我的看法:我已将其添加到我的application.rb中:config.i18n.load_path+=Dir[Rails.root.join('my','locales','*.{rb,yml}').to_s]config.i18n.default_locale=:da如果我删除I18配置,帮助程序会处理英语。更新:我在config/enviorments/devolpment
如果我使用ruby版本2.5.1和Rails版本2.3.18会怎样?我有基于rails2.3.18和ruby1.9.2p320构建的rails应用程序,我只想升级ruby的版本,而不是rails,这可能吗?我必须面对哪些挑战? 最佳答案 GitHub维护apublicfork它有针对旧Rails版本的分支,有各种变化,它们一直在运行。有一段时间,他们在较新的Ruby版本上运行较旧的Rails版本,而不是最初支持的版本,因此您可能会发现一些关于需要向后移植的有用提示。不过,他们现在已经有几年没有使用2.3了,所以充其量只能让更
我试过重新启动apache,缓存的页面仍然出现,所以一定有一个文件夹在某个地方。我没有“公共(public)/缓存”,那么我还应该查看哪些其他地方?是否有一个URL标志也可以触发此效果? 最佳答案 您需要触摸一个文件才能清除phusion,例如:touch/webapps/mycook/tmp/restart.txt参见docs 关于ruby-如何在Ubuntu中清除RubyPhusionPassenger的缓存?,我们在StackOverflow上找到一个类似的问题:
大家好!我对我的:username字段进行了一个小的验证,它应该是4到30个字符。我写了一个验证::length=>{:within=>4..30,:message=>I18n.t('activerecord.errors.range')-我想显示一个错误各种错误的消息(不像,太长或太短),但这里有一个问题-我可以将最小值和最大值都传递给翻译,以便有类似的东西:用户名应该在4到30个字符之间。目前我有:range:"shouldbebetween%{count}and%{count}characters",这显然不起作用(只是为了检查)。是否可以从范围中获取这些值?谢谢大家的指教!
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
在VMware16.2.4安装Ubuntu一、安装VMware1.打开VMwareWorkstationPro官网,点击即可进入。2.进入后向下滑动找到Workstation16ProforWindows,点击立即下载。3.下载完成,文件大小615MB,如下图:4.鼠标右击,以管理员身份运行。5.点击下一步6.勾选条款,点击下一步7.先勾选,再点击下一步8.去掉勾选,点击下一步9.点击下一步10.点击安装11.点击许可证12.在百度上搜索VM16许可证,复制填入,然后点击输入即可,亲测有效。13.点击完成14.重启系统,点击是15.双击VMwareWorkstationPro图标,进入虚拟机主
@作者:SYFStrive @博客首页:HomePage📜:微信小程序📌:个人社区(欢迎大佬们加入)👉:社区链接🔗📌:觉得文章不错可以点点关注👉:专栏连接🔗💃:感谢支持,学累了可以先看小段由小胖给大家带来的街舞👉微信小程序(🔥)目录自定义组件-behaviors 1、什么是behaviors 2、behaviors的工作方式 3、创建behavior 4、导入并使用behavior 5、behavior中所有可用的节点 6、同名字段的覆盖和组合规则总结最后自定义组件-behaviors 1、什么是behaviorsbehaviors是小程序中,用于实现
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc