文章目录
A*(A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法,广泛应用于室内机器人路径搜索、游戏动画路径搜索等。它是图搜索算法的一种。
A*算法是一种启发式的搜索算法,它是基于深度优先算法(Depth First Search, DFS)和广度优先算法(Breadth First Search, BFS)的一种融合算法,按照一定原则确定如何选取下一个结点。
启发式搜索算法指的是,从起点出发,先寻找起点相邻的栅格,判断它是否是最好的位置,基于这个最好的栅格再往外向其相邻的栅格扩展,找到一个此时最好的位置,通过这样一步一步逼近目标点,减少盲目的搜索,提高了可行性和搜索效率。
深度优先搜索算法的思想是,搜索算法从起点开始进行搜索(初始状态下待搜索区域内所有结点均未被访问),与周围所有邻点进行比较,选择其中距离终点最近的点进行存储,然后再以该邻点为基础对比其周围未被访问的所有邻点,仍然选择距离终点最近的邻点存储。若访问结点到达终点或访问完所有结点仍未到达终点,则视为搜索失败。成功搜索所存储的结点连接而成的路径即为起点到终点的路径。
广度优先搜索的原理是,从初始点出发依次访问与它相连接的邻点,访问完毕后再从这些邻点出发访问邻点的邻点,但是要保证先被访问的邻点的邻点要比后被访问的邻点的邻点先访问,直至图中所有已被访问的结点的邻点都被访问到。如果此时图中尚有未被访问的结点,则需要选取一个尚未被访问的结点作为个新的初始点,继续搜索访问,直到图中所有的结点都被访问一遍为止。
因此深度优先算法与广度优先搜索算法从过程上存在较大差异。深度优先算法优先选择离目标点最近的结点,而广度优先搜索算法优先选择离初始点最近的点。基于深度优先算法,能以最快的速度找到一条连接初始点到目标点的路径,但不能保证路径的最优性(例如以路径最短为标准);广度优先搜索算法则必然能找到最短的路径,但由于需要遍历所有的结点,其计算复杂程度更大。基于这两种算法的优缺点,A*算法基于启发函数构建了代价函数,既考虑了新结点距离初始点的代价,又考虑了新结点与目标点距离的代价。
A*算法使用一个路径优劣评价公式为:
f
(
n
)
=
g
(
n
)
+
h
(
n
)
f(n)=g(n)+h(n)
f(n)=g(n)+h(n)
A*算法需要维护两个状态表,分别称为openList表和closeList表。openList表由待考察的节点组成, closeList表由已经考察过的节点组成。
如图,假设我们需要从A点到目标点,这两点之间有一堵墙。
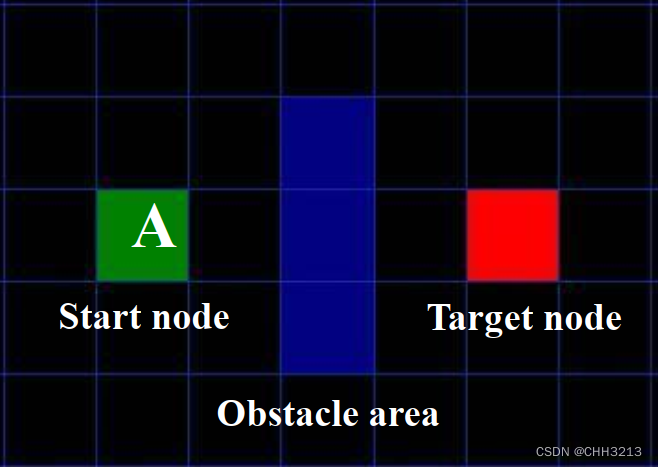
首先,我们把地图栅格化,把每一个方格的中心称为节点;这个特殊的方法把我们的搜索区域简化为了 2 维数组。数组的每一项代表一个格子,它的状态就是可走 (walkalbe) 和不可走 (unwalkable) 。通过计算出从 A 到 目标点需要走过哪些方格,就找到了路径。一旦路径找到了,便从一个方格的中心移动到另一个方格的中心,直至到达目的地。
一旦我们把搜寻区域简化为一组可以量化的节点后,我们下一步要做的便是查找最短路径。在 A* 中,我们从起点开始,检查其相邻的方格,然后向四周扩展,直至找到目标。

A为父节点,并把它加入到 openList中。现在 openList 里只有起点 A ,后面会慢慢加入更多的项。A周围共有8个节点,定义为子节点。将子节点中可达的(reachable)或者可走的(walkable)放入openList中,成为待考察对象。openList = {B,C,D,E,F,G,H,I}, closeList = {A}下面我们需要去选择节点A相邻的子节点中移动代价
f
f
f最小的节点,下面以节点I的计算为例。
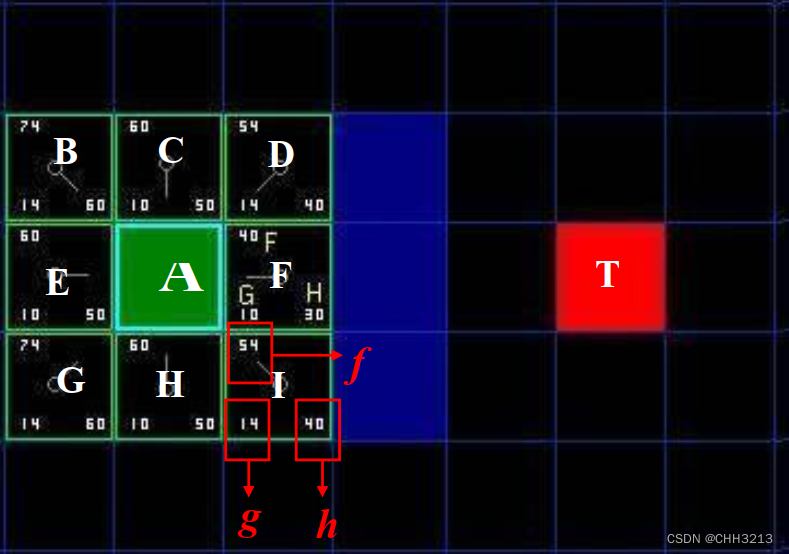
A到该格子是斜向移动,单步移动距离为14,故
g
g
g = 14.A节点移动至I节点的总移动代价为:
f
=
g
+
h
=
54
f=g+h=54
f=g+h=54F,移到closeList中。openList = {B,C,D,E,G,H,I}, closeList = {A,F}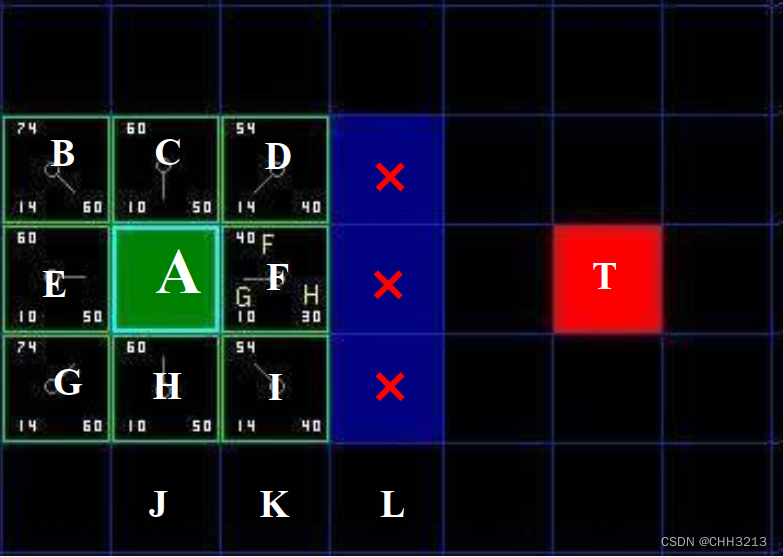
I(D节点的
f
f
f值跟I相同,任选其一即可,不过从速度上考虑,选择最后加入 openList 的方格更快。这导致了在寻路过程中,当靠近目标时,优先使用新找到的方格的偏好。 对相同数据的不同对待,只会导致两种版本的
A
∗
A^*
A∗ 找到等长的不同路径 ),从 openList里取出,放到 closeList 中。I的子节点 。X)已经在 opeLlist 中,则检查这条路径是否更优,也就是说经由当前节点( 我们选中的节点)到达节点X是否具有更小的
g
g
g 值。如果没有,不做任何操作。否则,如果
g
g
g 值更小,则把X的父节点设为当前方格 ,然后重新计算X的
f
f
f 值和
g
g
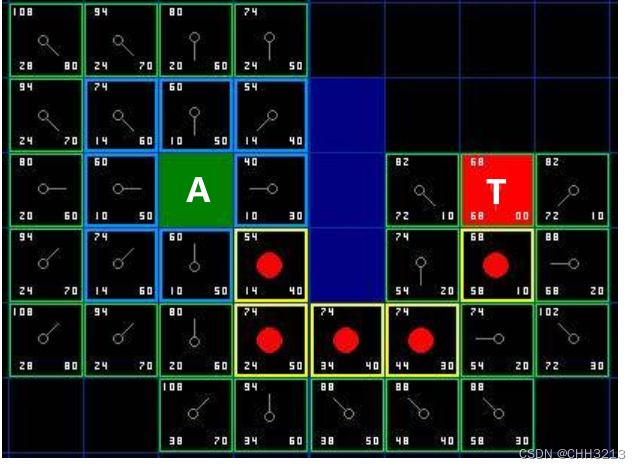
g 值。openList = {B,C,D,E,G,H,J,K,L}, closeList = {A,F,I}T,完成路径搜索,结束算法。完成路径搜索后,从终点开始,向父节点移动,这样就被带回到了起点,这就是搜索后的路径。如下图所示。从起点 A 移动到终点 T就是简单从路径上的一个方格的中心移动到另一个方格的中心,直至目标。
首先把起点加入 openList 。
重复如下过程:
遍历 openList ,查找 F 值最小的节点,把它作为当前要处理的节点。
把这个节点移到 closeList 。
对当前方格的 8 个相邻方格:
◆ 如果它是不可抵达的或者它在 closeList 中,忽略它;
◆ 如果它不在 openList 中,则把它加入 openList ,并且把当前方格设置为它的父节点,记录该方格的 f , g , h f,g,h f,g,h值。
◆ 如果它已经在 openList 中,检查这条路径 ( 即经由当前方格到达它那里 ) 是否更好,用 g g g 值作参考,更小的 g g g 值表示这是更好的路径。如果 g g g值更小,把该节点的父节点设置为当前方格,并重新计算它的 g g g 和 h h h 值。
停止搜索的情况有两种:
把终点加入到了openList 中,此时路径已经找到了
查找终点失败,并且 openList 是空的,此时没有路径。
保存路径。使用回溯的方法,从终点开始,每个方格沿着父节点移动直至起点,这就是最终搜索到的路径。
初始化open_list和close_list;
* 将起点加入open_list中,并设其移动代价为0;
* 如果open_list不为空,则从open_list中选取移动代价最小的节点n:
* 如果节点n为终点,则:
* 从终点开始逐步追踪parent节点,一直达到起点;
* 返回找到的结果路径,算法结束;
* 如果节点n不是终点,则:
* 将节点n从open_list中移除,并加入close_list中;
* 遍历节点n所有的邻近节点:
* 如果邻近节点m在close_list中,则:
* 跳过,选取下一个邻近节点
* 如果邻近节点m在open_list中,则:
* 计算起点经n到m的g值
* 如果此时计算出来的g值小于原来起点经m的原父节点到m的g值:
* 更新m的父节点为n,重新计算m的移动代价f=g+h
* 否则,跳过
* 如果邻近节点m不在open_list也不在close_list中,则:
* 设置节点m的parent为节点n
* 计算节点m的移动代价f=g+h
* 将节点m加入open_list中
代码实现来自PythonRobotics。
"""
A* grid planning
author: Atsushi Sakai(@Atsushi_twi)
Nikos Kanargias (nkana@tee.gr)
See Wikipedia article (https://en.wikipedia.org/wiki/A*_search_algorithm)
"""
import math
import matplotlib.pyplot as plt
show_animation = True
class AStarPlanner:
def __init__(self, ox, oy, resolution, rr):
"""
Initialize grid map for a star planning
ox: x position list of Obstacles [m]
oy: y position list of Obstacles [m]
resolution: grid resolution [m],地图的像素
rr: robot radius[m]
"""
self.resolution = resolution
self.rr = rr
self.min_x, self.min_y = 0, 0
self.max_x, self.max_y = 0, 0
self.obstacle_map = None
self.x_width, self.y_width = 0, 0
self.motion = self.get_motion_model()
self.calc_obstacle_map(ox, oy)
class Node:
"""定义搜索区域节点类,每个Node都包含坐标x和y, 移动代价cost和父节点索引。
"""
def __init__(self, x, y, cost, parent_index):
self.x = x # index of grid
self.y = y # index of grid
self.cost = cost
self.parent_index = parent_index
def __str__(self):
return str(self.x) + "," + str(self.y) + "," + str(
self.cost) + "," + str(self.parent_index)
def planning(self, sx, sy, gx, gy):
"""
A star path search
输入起始点和目标点的坐标(sx,sy)和(gx,gy),
最终输出的结果是路径包含的点的坐标集合rx和ry。
input:
s_x: start x position [m]
s_y: start y position [m]
gx: goal x position [m]
gy: goal y position [m]
output:
rx: x position list of the final path
ry: y position list of the final path
"""
start_node = self.Node(self.calc_xy_index(sx, self.min_x),
self.calc_xy_index(sy, self.min_y), 0.0, -1)
goal_node = self.Node(self.calc_xy_index(gx, self.min_x),
self.calc_xy_index(gy, self.min_y), 0.0, -1)
open_set, closed_set = dict(), dict()
open_set[self.calc_grid_index(start_node)] = start_node
while 1:
if len(open_set) == 0:
print("Open set is empty..")
break
c_id = min(
open_set,
key=lambda o: open_set[o].cost + self.calc_heuristic(goal_node, open_set[o]))
current = open_set[c_id]
# show graph
if show_animation: # pragma: no cover
plt.plot(self.calc_grid_position(current.x, self.min_x),
self.calc_grid_position(current.y, self.min_y), "xc")
# for stopping simulation with the esc key.
plt.gcf().canvas.mpl_connect('key_release_event', lambda event: [exit(0) if event.key == 'escape' else None])
if len(closed_set.keys()) % 10 == 0:
plt.pause(0.001)
# 通过追踪当前位置current.x和current.y来动态展示路径寻找
if current.x == goal_node.x and current.y == goal_node.y:
print("Find goal")
goal_node.parent_index = current.parent_index
goal_node.cost = current.cost
break
# Remove the item from the open set
del open_set[c_id]
# Add it to the closed set
closed_set[c_id] = current
# expand_grid search grid based on motion model
for i, _ in enumerate(self.motion):
node = self.Node(current.x + self.motion[i][0],
current.y + self.motion[i][1],
current.cost + self.motion[i][2], c_id)
n_id = self.calc_grid_index(node)
# If the node is not safe, do nothing
if not self.verify_node(node):
continue
if n_id in closed_set:
continue
if n_id not in open_set:
open_set[n_id] = node # discovered a new node
else:
if open_set[n_id].cost > node.cost:
# This path is the best until now. record it
open_set[n_id] = node
rx, ry = self.calc_final_path(goal_node, closed_set)
return rx, ry
def calc_final_path(self, goal_node, closed_set):
# generate final course
rx, ry = [self.calc_grid_position(goal_node.x, self.min_x)], [
self.calc_grid_position(goal_node.y, self.min_y)]
parent_index = goal_node.parent_index
while parent_index != -1:
n = closed_set[parent_index]
rx.append(self.calc_grid_position(n.x, self.min_x))
ry.append(self.calc_grid_position(n.y, self.min_y))
parent_index = n.parent_index
return rx, ry
@staticmethod
def calc_heuristic(n1, n2):
"""计算启发函数
Args:
n1 (_type_): _description_
n2 (_type_): _description_
Returns:
_type_: _description_
"""
w = 1.0 # weight of heuristic
d = w * math.hypot(n1.x - n2.x, n1.y - n2.y)
return d
def calc_grid_position(self, index, min_position):
"""
calc grid position
:param index:
:param min_position:
:return:
"""
pos = index * self.resolution + min_position
return pos
def calc_xy_index(self, position, min_pos):
return round((position - min_pos) / self.resolution)
def calc_grid_index(self, node):
return (node.y - self.min_y) * self.x_width + (node.x - self.min_x)
def verify_node(self, node):
px = self.calc_grid_position(node.x, self.min_x)
py = self.calc_grid_position(node.y, self.min_y)
if px < self.min_x:
return False
elif py < self.min_y:
return False
elif px >= self.max_x:
return False
elif py >= self.max_y:
return False
# collision check
if self.obstacle_map[node.x][node.y]:
return False
return True
def calc_obstacle_map(self, ox, oy):
self.min_x = round(min(ox))
self.min_y = round(min(oy))
self.max_x = round(max(ox))
self.max_y = round(max(oy))
print("min_x:", self.min_x)
print("min_y:", self.min_y)
print("max_x:", self.max_x)
print("max_y:", self.max_y)
self.x_width = round((self.max_x - self.min_x) / self.resolution)
self.y_width = round((self.max_y - self.min_y) / self.resolution)
print("x_width:", self.x_width)
print("y_width:", self.y_width)
# obstacle map generation
self.obstacle_map = [[False for _ in range(self.y_width)]
for _ in range(self.x_width)]
for ix in range(self.x_width):
x = self.calc_grid_position(ix, self.min_x)
for iy in range(self.y_width):
y = self.calc_grid_position(iy, self.min_y)
for iox, ioy in zip(ox, oy):
d = math.hypot(iox - x, ioy - y)
if d <= self.rr:
self.obstacle_map[ix][iy] = True
break
@staticmethod
def get_motion_model():
# dx, dy, cost
motion = [[1, 0, 1],
[0, 1, 1],
[-1, 0, 1],
[0, -1, 1],
[-1, -1, math.sqrt(2)],
[-1, 1, math.sqrt(2)],
[1, -1, math.sqrt(2)],
[1, 1, math.sqrt(2)]]
return motion
def main():
print(__file__ + " start!!")
# start and goal position
sx = 10.0 # [m]
sy = 10.0 # [m]
gx = 50.0 # [m]
gy = 50.0 # [m]
grid_size = 2.0 # [m]
robot_radius = 1.0 # [m]
# set obstacle positions
ox, oy = [], []
for i in range(-10, 60):
ox.append(i)
oy.append(-10.0)
for i in range(-10, 60):
ox.append(60.0)
oy.append(i)
for i in range(-10, 61):
ox.append(i)
oy.append(60.0)
for i in range(-10, 61):
ox.append(-10.0)
oy.append(i)
for i in range(-10, 40):
ox.append(20.0)
oy.append(i)
for i in range(0, 40):
ox.append(40.0)
oy.append(60.0 - i)
if show_animation: # pragma: no cover
plt.plot(ox, oy, ".k")
plt.plot(sx, sy, "og")
plt.plot(gx, gy, "xb")
plt.grid(True)
plt.axis("equal")
a_star = AStarPlanner(ox, oy, grid_size, robot_radius)
rx, ry = a_star.planning(sx, sy, gx, gy)
if show_animation: # pragma: no cover
plt.plot(rx, ry, "-r")
plt.pause(0.001)
plt.show()
if __name__ == '__main__':
main()
由于在自动驾驶中算法实现一般使用C++,所以我也使用C++实现了相关功能,代码结构与python代码实现类似,这边就不再做相关代码解释了。完整代码详见另一个github仓库。
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
这个问题在这里已经有了答案:关闭10年前。PossibleDuplicate:Pythonconditionalassignmentoperator对于这样一个简单的问题表示歉意,但是谷歌搜索||=并不是很有帮助;)Python中是否有与Ruby和Perl中的||=语句等效的语句?例如:foo="hey"foo||="what"#assignfooifit'sundefined#fooisstill"hey"bar||="yeah"#baris"yeah"另外,类似这样的东西的通用术语是什么?条件分配是我的第一个猜测,但Wikipediapage跟我想的不太一样。
什么是ruby的rack或python的Java的wsgi?还有一个路由库。 最佳答案 来自Python标准PEP333:Bycontrast,althoughJavahasjustasmanywebapplicationframeworksavailable,Java's"servlet"APImakesitpossibleforapplicationswrittenwithanyJavawebapplicationframeworktoruninanywebserverthatsupportstheservletAPI.ht
目录一.加解密算法数字签名对称加密DES(DataEncryptionStandard)3DES(TripleDES)AES(AdvancedEncryptionStandard)RSA加密法DSA(DigitalSignatureAlgorithm)ECC(EllipticCurvesCryptography)非对称加密签名与加密过程非对称加密的应用对称加密与非对称加密的结合二.数字证书图解一.加解密算法加密简单而言就是通过一种算法将明文信息转换成密文信息,信息的的接收方能够通过密钥对密文信息进行解密获得明文信息的过程。根据加解密的密钥是否相同,算法可以分为对称加密、非对称加密、对称加密和非
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
我想解析一个已经存在的.mid文件,改变它的乐器,例如从“acousticgrandpiano”到“violin”,然后将它保存回去或作为另一个.mid文件。根据我在文档中看到的内容,该乐器通过program_change或patch_change指令进行了更改,但我找不到任何在已经存在的MIDI文件中执行此操作的库.他们似乎都只支持从头开始创建的MIDI文件。 最佳答案 MIDIpackage会为您完成此操作,但具体方法取决于midi文件的原始内容。一个MIDI文件由一个或多个音轨组成,每个音轨是十六个channel中任何一个上的
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
本文主要介绍在使用Selenium进行自动化测试或者任务时,对于使用了iframe的页面,如何定位iframe中的元素文章目录场景描述解决方案具体代码场景描述当我们在使用Selenium进行自动化测试的时候,可能会遇到一些界面或者窗体是使用HTML的iframe标签进行承载的。对于iframe中的标签,如果直接查找是无法找到的,会抛出没有找到元素的异常。比如近在咫尺的例子就是,CSDN的登录窗体就是使用的iframe,大家可以尝试通过F12开发者模式查看到的tag_name,class_name,id或者xpath来定位中的页面元素,会抛出NoSuchElementException异常。解决
如何使此根路径转到:“/dashboard”而不仅仅是http://example.com?root:to=>'dashboard#index',:constraints=>lambda{|req|!req.session[:user_id].blank?} 最佳答案 您可以通过以下方式实现:root:to=>redirect('/dashboard')match'/dashboard',:to=>"dashboard#index",:constraints=>lambda{|req|!req.session[:user_id].b