摘要:本程序主要实现了python的opencv人工智能视觉模块的目标跟踪功能。
本文分享自华为云社区《python进阶——人工智能实时目标跟踪,这一篇就够用了!》,作者:lqj_本人 。
本程序主要实现了python的opencv人工智能视觉模块的目标跟踪功能。
区域性锁定目标实时动态跟踪(适用 警方追捕,无人机锁定拍摄等)
特性:
1.BOOSTING:算法原理类似于Harr cascdes(AdaBoost),是一种很老的算法。这个算法速度慢并且不准。
2.MIL:比BOOSTING准一点
3.KCF:速度比BOOSTING和MIL更快,与BOOSTING和MIL一样不能很好的处理遮挡问题。
4.CSRT:比KCF更准一些,但是速度比KCF慢
5.MedianFlow:对于快速移动的目标和外形比那花迅速的目标效果不好
6.TLD:会产生朵的false-posittives
7.MOSSE:算法速度非常快,但是准确率比不上KCF和CSRT,在一些追求算法的速度场合很适用
8.GOTURN:OpenCV中自带的唯一一个基于深度学习的算法,运行短发需要提前下载好模型文件
分别对应的伴生的函数:
kcf:cv2.legacy.TrackerKCF_create
csrt:cv2.legacy.TrackerCSRT_create
boosting:cv2.legacy.TrackerBoosting_create
mil:cv2.legacy.TrackerMIL_create
tld:cv2.legacy.TrackerTLD_create
medianflow:cv2.legacy.TrackerMedianFlow_create
mosse:cv2.legacy.TrackerMOSSE_create导入cv模块
ret,frame = cap.read()
import cv2使用csrt算法,引用伴生函数,并赋值给tracker
tracker = cv2.legacy.TrackerCSRT_create()读取视频流
cap = cv2.VideoCapture('11.mp4')先读取到第一帧
ret,frame = cap.read()使用selectROI(前景),画框将目标框起,并赋值给bbox
bbox = cv2.selectROI('A',frame,fromCenter=False,showCrosshair=True)初始化tracker,将上面的两个值传入
tracker.init(frame,bbox)读取每一帧
ret,frame = cap.read()根据每一帧来更新tracker
ok,box = tracker.update(frame)若读取成功,就定位画框,并跟随
if ok :
(x,y,w,h) = [int(v) for v in box]
cv2.rectangle(frame,pt1=(int(x),int(y)),pt2=(int(x)+int(w),int(y)+int(h)),color=(0,255,0),thickness=2)显示视频流
cv2.imshow('A', frame)等待50毫秒或按空格键退出
if cv2.waitKey(50) == ord(' '):
break释放视频流和释放窗口
cap.release()
cv2.destroyAllWindows()import cv2
tracker = cv2.legacy.TrackerCSRT_create()#使用csrt算法,引用伴生函数,并赋值给tracker
cap = cv2.VideoCapture('11.mp4')#读取视频流
ret,frame = cap.read()#先读取第一帧
bbox = cv2.selectROI('A',frame,fromCenter=False,showCrosshair=True)#使用selectROI(前景),画框将目标框起,并赋值给bbox
tracker.init(frame,bbox)#初始化tracker,将上面的两个值传入
while True:
ret,frame = cap.read()#读取每一帧
ok,box = tracker.update(frame)#根据每一帧来跟新tracker
# 若读取成功,我们就定位画框,并跟随
if ok :
(x,y,w,h) = [int(v) for v in box]
cv2.rectangle(frame,pt1=(int(x),int(y)),pt2=(int(x)+int(w),int(y)+int(h)),color=(0,255,0),thickness=2)
cv2.imshow('A', frame)#显示视频流
if cv2.waitKey(50) == ord(' '):#等待50毫秒或键盘按空格键退出
break
# 释放视频流,释放窗口
cap.release()
cv2.destroyAllWindows()结果演示
思路构建
1.先将实时摄像流或录制视频流,灰度转化并高斯模糊
2.用二值化算法将流中的物体轮廓扩充
3.分别先读到第一帧和第二帧,让其对比
4.寻找对比后,流的轮廓位置,并开启简易模式
5.过滤物体的矩阵轮廓将其定位绘出
详细代码讲解
导入cv模块
import cv2将视频流转换并让其高斯模糊
gray = cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray,(5,5),0)二值化扩充
_,thresh = cv2.threshold(blur,20,255,cv2.THRESH_BINARY)
dilated = cv2.dilate(thresh,None,iterations=3)
return dilated读取视频流或实时摄像流
cap = cv2.VideoCapture('11.mp4')读取第一帧
ret,frame1 = cap.read()读取第二帧
ret,frame2 = cap.read()判断cap是否为打开状态
while cap.isOpened():若为打开,则第一帧与第二帧比较
diff = cv2.absdiff(frame1,frame2)
mask = filter_img(diff)寻找比较后的物体轮廓,并开启简易模式
contours,_ = cv2.findContours(mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)使用方框将视频流中的物体框出,得到矩阵的宽高
(x,y,w,h) = cv2.boundingRect(contour)若矩阵的面积小于10(根据视频流中物体的大小来定义),直接无视
if cv2.contourArea(contour) < 10:将过滤的物体的矩阵轮廓绘出(一定要用int整形)
cv2.rectangle(frame1,pt1=(int(x),int(y)),pt2=(int(x)+int(w),int(y)+int(h)),color=(0,255,0),thickness=1)将第一帧显示
cv2.imshow('A',frame1)将上面赋值的mask显示
cv2.imshow('B',mask)实现前后帧对比,并定位物体运动轨迹
1.将第二帧赋值给第一帧
frame1 = frame22.再将cap读到的赋值给第二帧()
ret,frame2 = cap.read()等待50毫秒或者按空格结束
if cv2.waitKey(50) == ord(' '):
break释放视频流及释放窗口
cap.release()
cv2.destroyAllWindows()import cv2
def filter_img(frame):
#将视频流转换灰度并让其高斯模糊
gray = cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray,(5,5),0)
#二值化将其扩充
_,thresh = cv2.threshold(blur,20,255,cv2.THRESH_BINARY)
dilated = cv2.dilate(thresh,None,iterations=3)
return dilated
# 读取视频流
cap = cv2.VideoCapture('11.mp4')
ret,frame1 = cap.read()#读到第一帧
ret,frame2 = cap.read()#读到第二帧
while cap.isOpened():#判断cap是否打开
diff = cv2.absdiff(frame1,frame2)#若打开,则第一帧和第二帧作比较
mask = filter_img(diff)
contours,_ = cv2.findContours(mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)#寻找视频流的轮廓,简单模式
#用方框将视频流中的物体用矩形框出
for contour in contours:
(x,y,w,h) = cv2.boundingRect(contour)#得到矩阵的宽高
if cv2.contourArea(contour) < 10:#若矩阵的面积小于200,就无视(太小了)
continue
cv2.rectangle(frame1,pt1=(int(x),int(y)),pt2=(int(x)+int(w),int(y)+int(h)),color=(0,255,0),thickness=1)#将过滤的物体的矩阵轮廓绘出
# cv2.drawContours(frame1,contours,-1,(0,255,0),2)#将视频流中的物体轮廓画出
cv2.imshow('A',frame1)#将第一帧显示
cv2.imshow('B',mask)#将mask也显示
frame1 = frame2#将第二帧赋值给第一帧
ret,frame2 = cap.read()#再将cap读到的赋值给第二帧
if cv2.waitKey(50) == ord(' '):#等待五十毫秒或者按空格结束
break
#销毁cap流
cap.release()
#释放窗口
cv2.destroyAllWindows()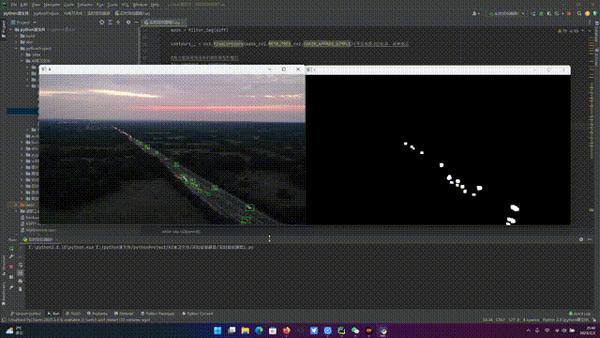
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
这个问题在这里已经有了答案:关闭10年前。PossibleDuplicate:Pythonconditionalassignmentoperator对于这样一个简单的问题表示歉意,但是谷歌搜索||=并不是很有帮助;)Python中是否有与Ruby和Perl中的||=语句等效的语句?例如:foo="hey"foo||="what"#assignfooifit'sundefined#fooisstill"hey"bar||="yeah"#baris"yeah"另外,类似这样的东西的通用术语是什么?条件分配是我的第一个猜测,但Wikipediapage跟我想的不太一样。
什么是ruby的rack或python的Java的wsgi?还有一个路由库。 最佳答案 来自Python标准PEP333:Bycontrast,althoughJavahasjustasmanywebapplicationframeworksavailable,Java's"servlet"APImakesitpossibleforapplicationswrittenwithanyJavawebapplicationframeworktoruninanywebserverthatsupportstheservletAPI.ht
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
我想解析一个已经存在的.mid文件,改变它的乐器,例如从“acousticgrandpiano”到“violin”,然后将它保存回去或作为另一个.mid文件。根据我在文档中看到的内容,该乐器通过program_change或patch_change指令进行了更改,但我找不到任何在已经存在的MIDI文件中执行此操作的库.他们似乎都只支持从头开始创建的MIDI文件。 最佳答案 MIDIpackage会为您完成此操作,但具体方法取决于midi文件的原始内容。一个MIDI文件由一个或多个音轨组成,每个音轨是十六个channel中任何一个上的
本文主要介绍在使用Selenium进行自动化测试或者任务时,对于使用了iframe的页面,如何定位iframe中的元素文章目录场景描述解决方案具体代码场景描述当我们在使用Selenium进行自动化测试的时候,可能会遇到一些界面或者窗体是使用HTML的iframe标签进行承载的。对于iframe中的标签,如果直接查找是无法找到的,会抛出没有找到元素的异常。比如近在咫尺的例子就是,CSDN的登录窗体就是使用的iframe,大家可以尝试通过F12开发者模式查看到的tag_name,class_name,id或者xpath来定位中的页面元素,会抛出NoSuchElementException异常。解决
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总
深度学习部署:Windows安装pycocotools报错解决方法1.pycocotools库的简介2.pycocotools安装的坑3.解决办法更多Ai资讯:公主号AiCharm本系列是作者在跑一些深度学习实例时,遇到的各种各样的问题及解决办法,希望能够帮助到大家。ERROR:Commanderroredoutwithexitstatus1:'D:\Anaconda3\python.exe'-u-c'importsys,setuptools,tokenize;sys.argv[0]='"'"'C:\\Users\\46653\\AppData\\Local\\Temp\\pip-instal
2022/8/4更新支持加入水印水印必须包含透明图像,并且水印图像大小要等于原图像的大小pythonconvert_image_to_video.py-f30-mwatermark.pngim_dirout.mkv2022/6/21更新让命令行参数更加易用新的命令行使用方法pythonconvert_image_to_video.py-f30im_dirout.mkvFFMPEG命令行转换一组JPG图像到视频时,是将这组图像视为MJPG流。我需要转换一组PNG图像到视频,FFMPEG就不认了。pyav内置了ffmpeg库,不需要系统带有ffmpeg工具因此我使用ffmpeg的python包装p