📌 分配轨道(数据关联)的方法:
上述两种方法的计算量太大!
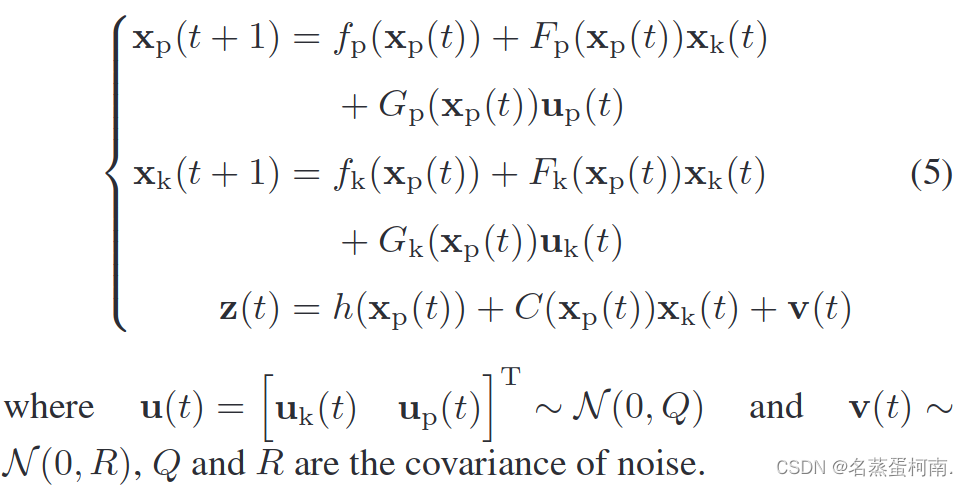
In [28,“Multi-3D-object tracking by fusing rgb and 3D-LIDAR data”], a method fusing RGB and 3D-LiDAR data(融合RGB图像和激光雷达数据进行数据关联) is proposed to track the perceived objects. It detected the appearance feature in RGB frame and geometrical feature in 3D pints cloud to associate the same obstacle. As the associated features are from different sensors, the method is limited by the overlap areas and lighting conditions.
In [29,“Multi-object tracking of 3D cuboids using aggregated features,”], a model with five states is proposed based on a Markov decision process. It considered the multiple aggregated features like color, semantic class, geometric properties, orientation and positional descriptor in the data association.(考虑了颜色、语义类、几何属性、方向和位置描述符等多个聚合特征,该方法能够很好地区分多种类型的障碍。但是,对于我们解决的车辆跟踪问题来说,它太复杂了)。
In our proposed algorithm, we consider the data association step as an assignment problem. In order to solve the problem of deformation and missing objects caused by occlusion and change of viewing angles, we retain the previously determined tracking list and use the Hungarian algorithm to achieve the match between the measurements and the targets.(在我们提出的算法中,我们将数据关联步骤视为分配问题。为了解决遮挡和视角变化导致的物体变形和丢失的问题,我们保留了之前确定的跟踪列表,并使用匈牙利算法来实现测量与目标的匹配。)**
数据关联使用的卡尔曼滤波方法:
本论文方法:
In this paper, we propose an L-shape fitting algorithm to fit vehicles with rectangular bounding boxes. We consider the velocity of the target vehicle to estimate the orientation of the target vehicle which greatly reduces the orientation error caused by incomplete observations. To identify different vehicles with consistent tracker IDs, we track the corner of the target vehicle by the RBPF, which estimates the position and the orientation separately.
📌 1. 路边检测
降低了检测和跟踪的复杂性,假设可行驶边界由两侧路缘石的位置定义。
基于缘石的几何特征,高度大约在10-15cm,并且是凸起的(the elevation changes sharply in the vertical direction)Based on these features, a robust approach in [4,“A real-time curb detection and tracking method for UGVs by using a 3D-LIDAR sensor,”] was proposed to recognize curbs.
2. 拟合路面
分离的点包含障碍物部分和地面部分。障碍物的高度通常高于地面。因此,这些点按其高程升序排序,并选择 ξ% 的点用于拟合地面。[35]–[37]
📌 1. L形拟合的常规方法:
我们想找到一个矩形来适应分割的点云簇。使用两个垂直的线表示L形:
x
c
o
s
θ
+
y
s
i
n
θ
=
c
1
−
x
s
i
n
θ
+
y
c
o
s
θ
=
c
2
\ \ \ x cos θ + y sin θ = c1 \\ −x sin θ + y cos θ = c2
xcosθ+ysinθ=c1−xsinθ+ycosθ=c2
因此,L形拟合可以概括为如下优化问题:
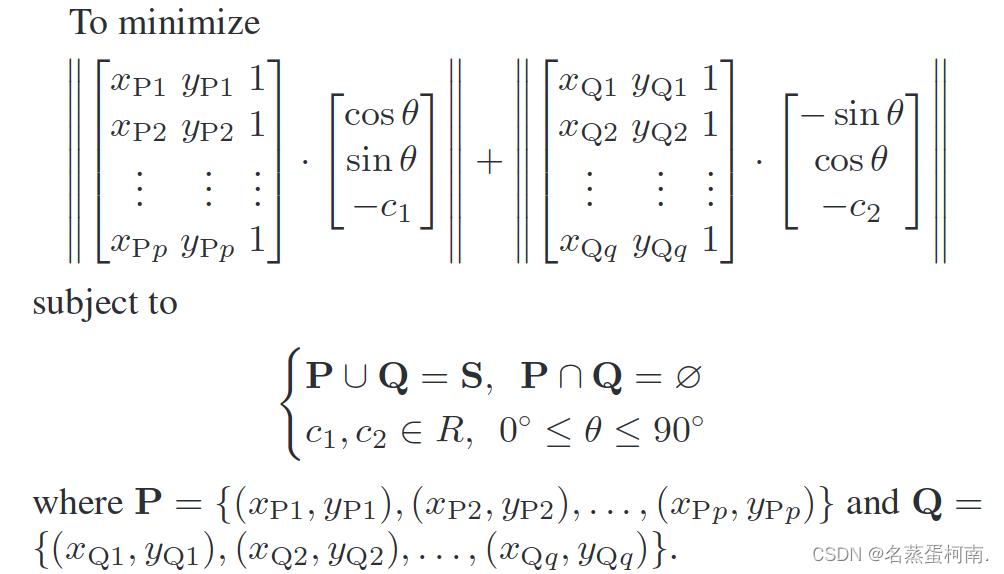
然而上述方法计算量太大,难以实时运行
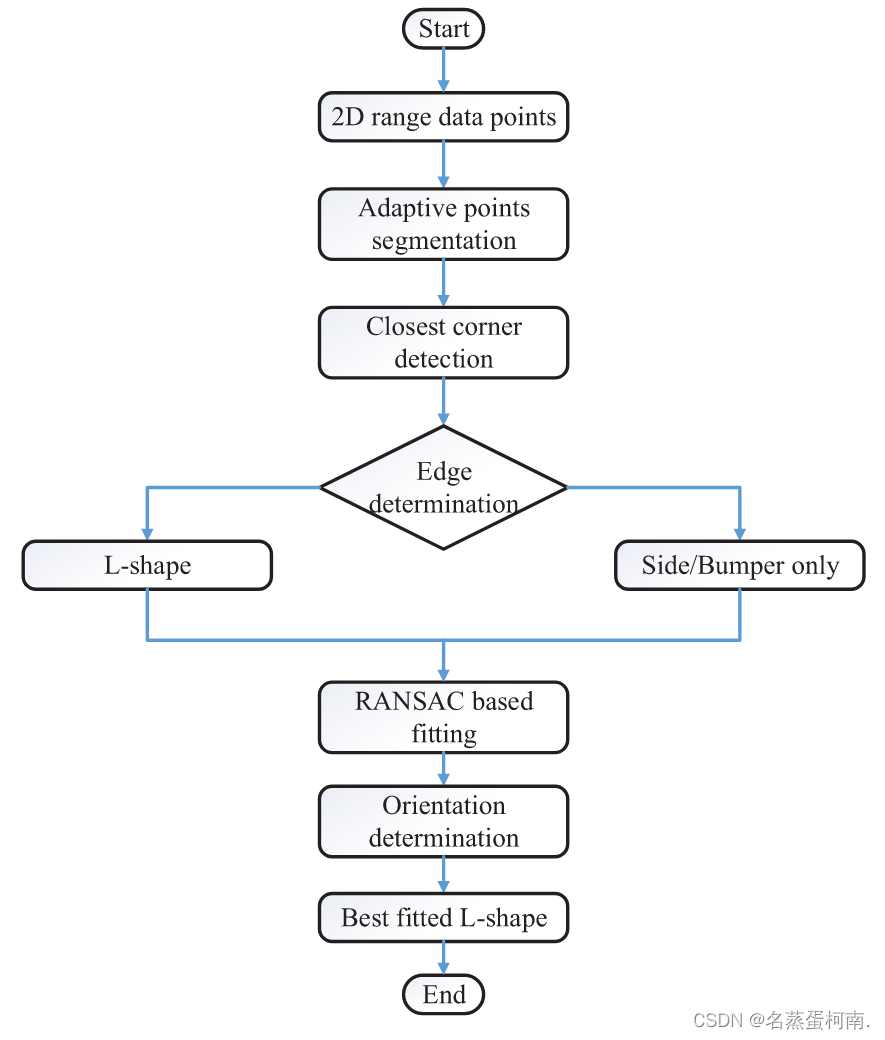
2.本文L形拟合的方法:
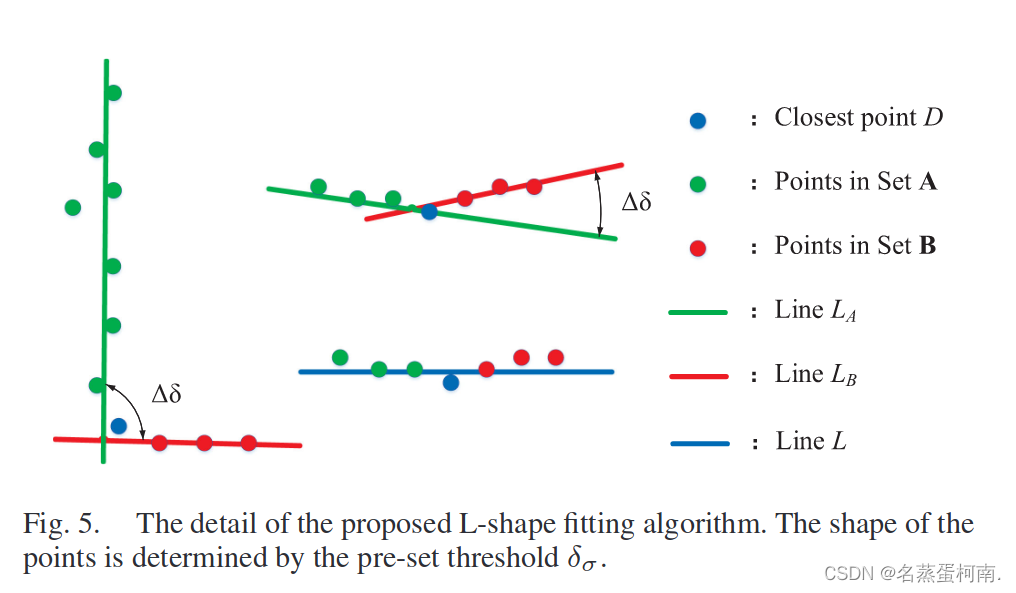
We instead rely on a corner-edge based algorithm to find the best-fit rectangle approximately.相反,我们依靠基于角边的算法来近似找到最佳拟合矩形。
The basic idea is that we find the nearest corner of the target vehicle first, and then fit the edges of the target vehicle using RANSAC.基本思想是我们先找到目标车辆最近的边角点,然后使用RANSAC拟合目标车辆的边缘。
A corner-edge based L-shape fitting method has also been proposed in [38]. However, the method proposed in [38,“L-shape model switching-based precise motion tracking of moving vehicles using laser scanners,”] assumes that all clustered points have a complete L-shape(完整的L形假设). In fact, due to occlusion and different viewing angles, the complete L-shape cannot be observed in most cases,(现实并非如此)
拟合过程:
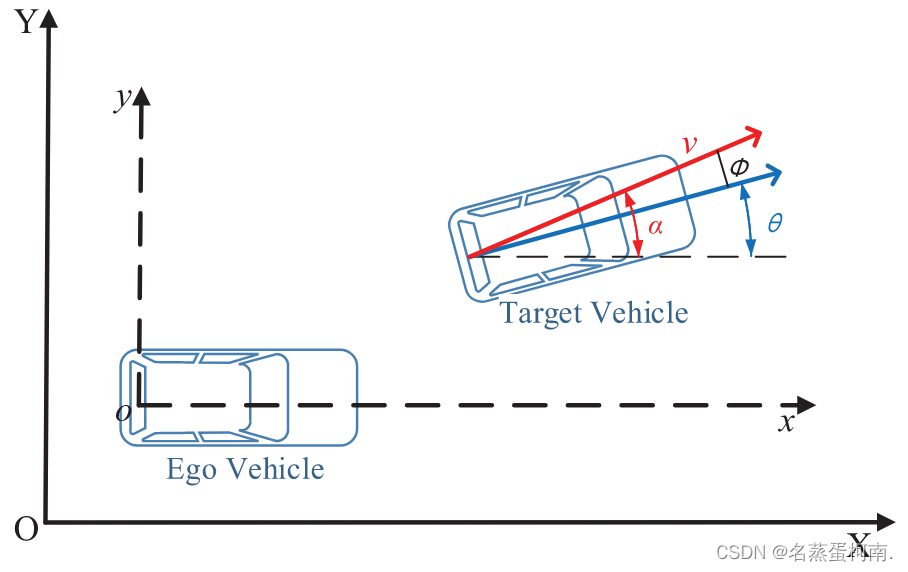
According to the Ackerman principle(阿克曼理论), we can get the angle between the velocity and the orientation of a target(我们可以得到目标的速度和方向之间的夹角)
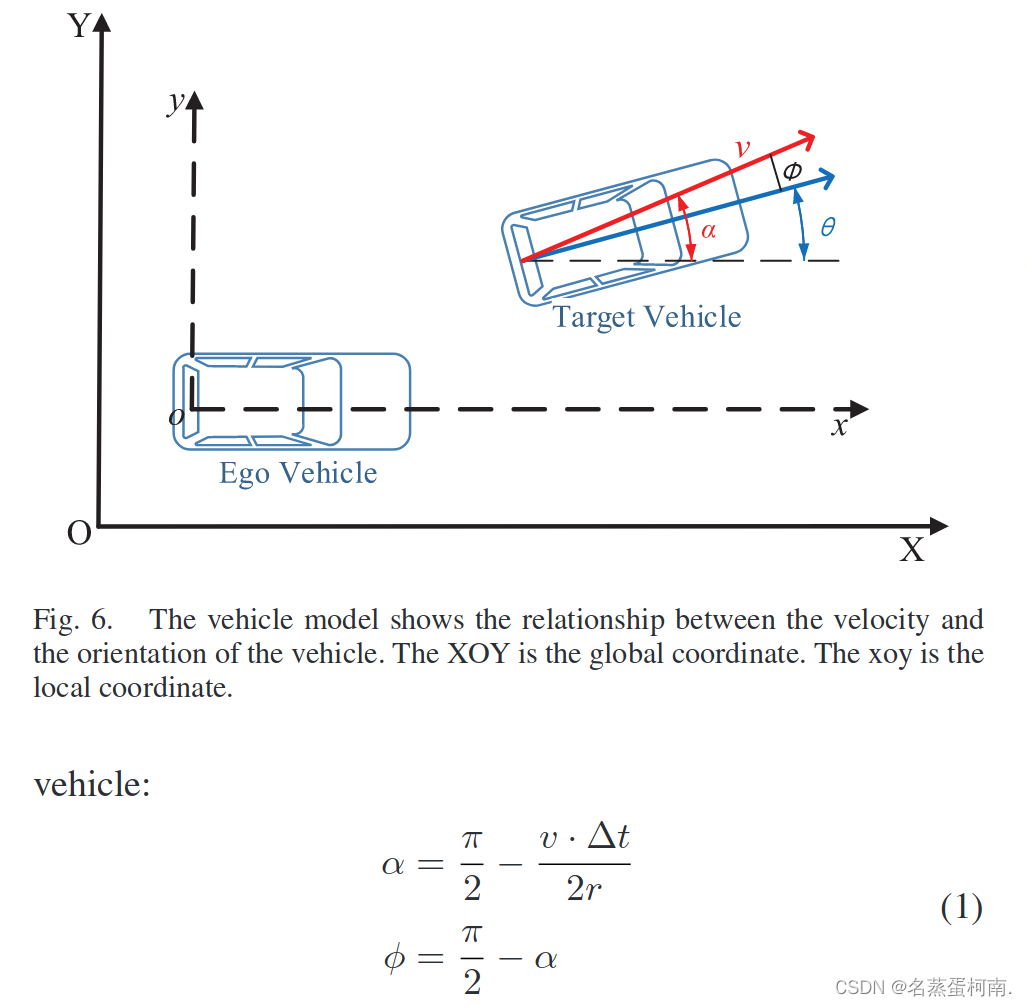
其中v是目标车辆的速度,Δt是两次采样之间的间隔,r是转弯半径,α是速度方向,φ是车辆滑动角。因此,我们用 α 确定哪条拟合线是目标车辆的方向。
观测量包括两种:One is the dynamic measurement ZD =[xc,yc]T for an update of the position. The other is the shape measurement ZS =[l1,l2,θ]T for an update of the shape state in the L-shape tracking.一种是用于更新位置的动态测量 ZD =[xc,yc]T。另一个是形状测量 ZS =[l1,l2,θ]T 用于更新 L 形跟踪中的形状状态。
📌 本文通过跟踪车辆最近的边角点而非车辆的几何形状和车辆中心来实现车辆的跟踪,这样做的好处是可以避免由于视点的遮挡和变化导致每次扫描中的不稳定!
📌 我们通过带有门函数的匈牙利算法来解决数据关联问题。The potential observation at a particular frame should be located in a gate area [40,“An algorithm for tracking multiple targets,”].
门控需要设置一个阈值
ε
ε
ε满足下式的观测值才会通过门控

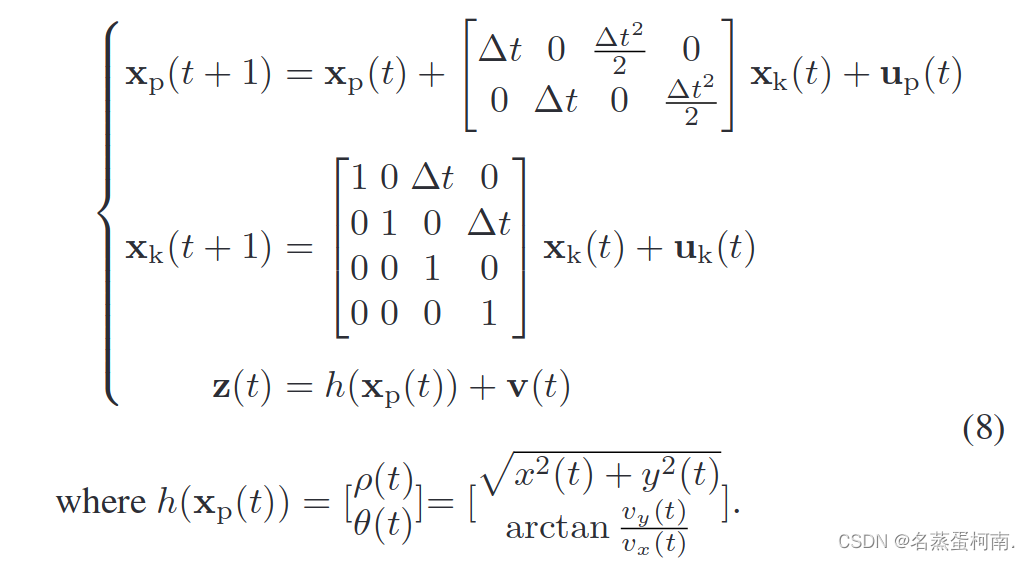
📌 车辆有三种运动模式:
状态向量如下:
x ( t ) = [ x ( t ) , y ( t ) , v x ( t ) , v y ( t ) , a x ( t ) , a y ( t ) ] T x(t)=[x(t),y(t),vx(t),vy(t),ax(t),ay(t)]^T x(t)=[x(t),y(t),vx(t),vy(t),ax(t),ay(t)]T
The constant acceleration model is:
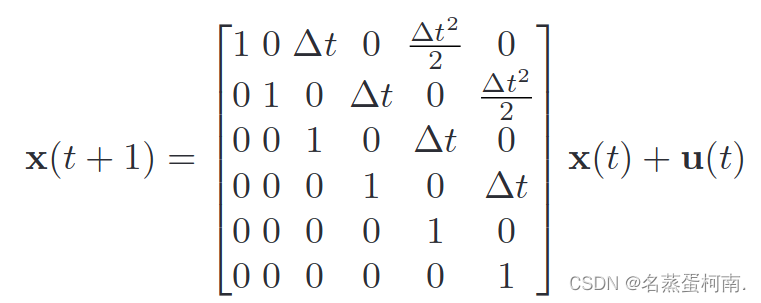
where Δt is the sampling time and u is the system noise.
📌 采用Rao-Blackwellized粒子滤波器
将状态向量
x
(
t
)
=
[
x
(
t
)
,
y
(
t
)
,
v
x
(
t
)
,
v
y
(
t
)
,
a
x
(
t
)
,
a
y
(
t
)
]
T
x(t)=[x(t),y(t),vx(t),vy(t),ax(t),ay(t)]^T
x(t)=[x(t),y(t),vx(t),vy(t),ax(t),ay(t)]T分成两部分:
x
(
t
)
=
[
x
k
(
t
)
;
x
p
(
t
)
]
x(t)=[x_k(t);x_p(t)]
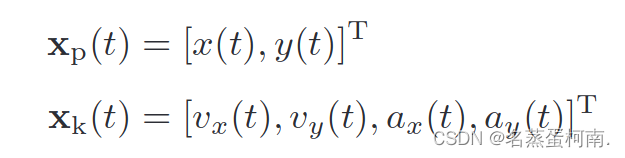
x(t)=[xk(t);xp(t)]其中
x
k
(
t
)
x_k(t)
xk(t)表示向量 x 在时间 t 的线性部分,
x
p
(
t
)
x_p(t)
xp(t)表示非线性部分。
因此,状态空间方程和观测方程可以概括如下:
📌 根据车辆的某个边角点恢复车辆的边界框

📌 1. 拟合部分使用不同的拟合方式作对照实验
车辆有几种不同的拟合方式:
We compare the proposed algorithm with the variance criterion, area criterion and closeness criterion proposed in [20,“Efficient l-shape fitting for vehicle detection using laser scanners,”]方差标准、面积标准和接近标准
单一的拟合方式对视点和视角变化很敏感。
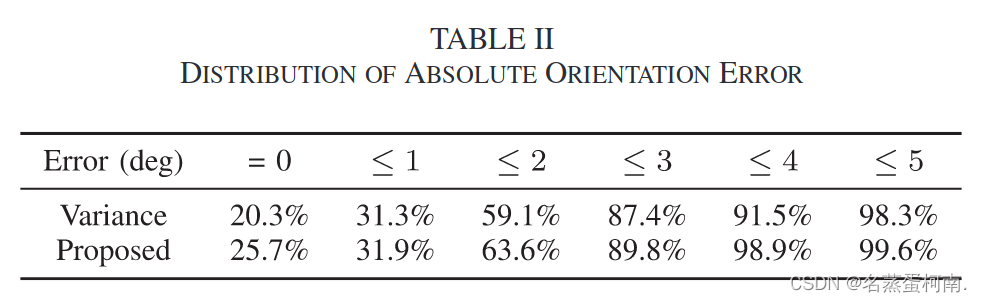
本文提出的L形拟合方式比上述几种拟合方式稳定(通过计算拟合出的车辆的朝向和真实朝向的误差来量化)
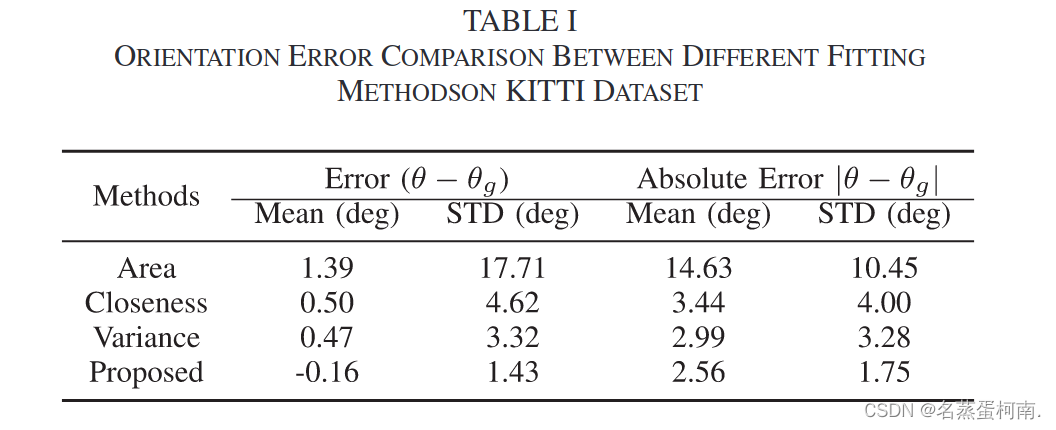
拟合的角度误差应该要小于5度
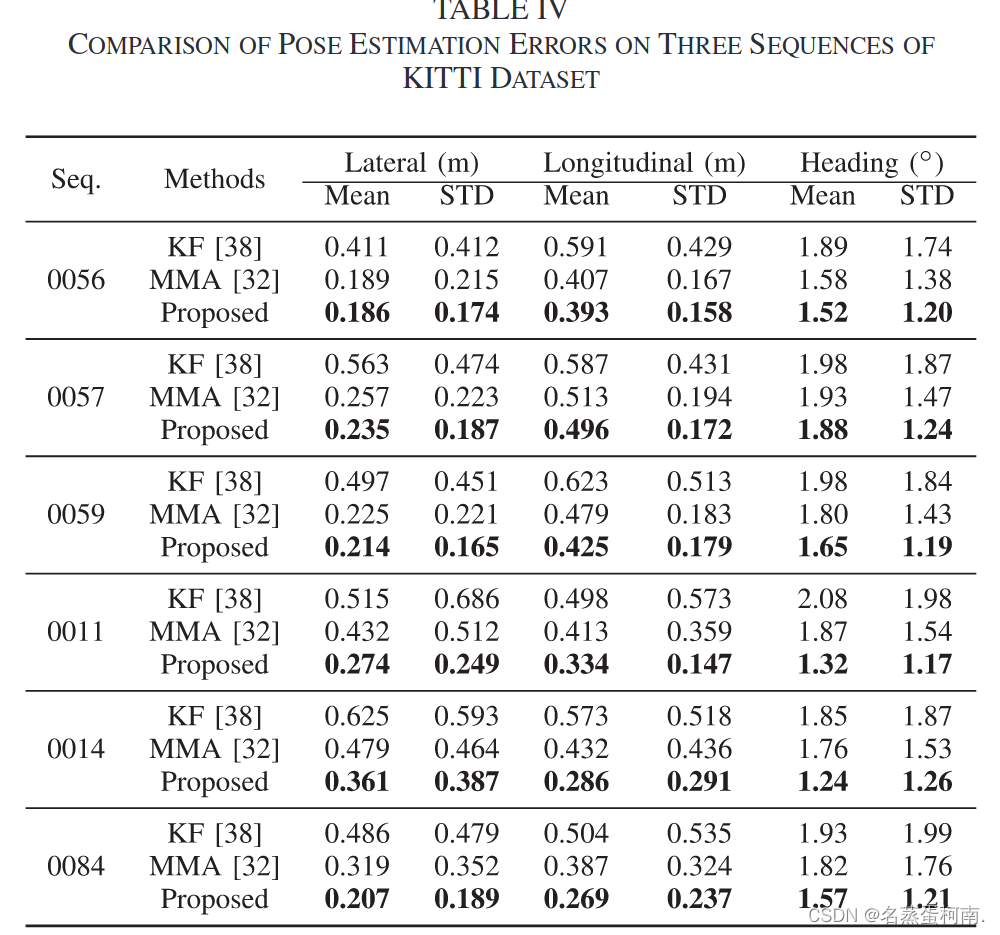
2.跟踪部分使用KF和Multiple Model Association (MMA)[38,“L-shape model switching-based precise motion tracking of moving vehicles using laser scanners,”]作对照实验
计算在横向位置、纵向位置和方向方面车辆跟踪的精度:
📌 本篇论文的创新点:
本篇论文值得借鉴的地方:
本篇论文未解决的问题:
车辆相距过近时很容易将两个车辆聚为一类,从而会影响车辆跟踪的稳定性和正确率。