摘要:本文详细介绍如何使用离线方法配置前面一篇博文《人脸表情识别系统介绍——上篇(python实现,含UI界面及完整代码)》项目中代码的Python环境,能够有效避免一些可能出现的依赖包安装问题。本离线包需要用到的软件有PyCharm和Anaconda,博主已打包好并通过百度网盘分享,以便关注该项目的博友下载安装使用,博文要点见目录。
前面博主写的博文人脸表情识别系统介绍——上篇(python实现,含UI界面及完整代码)分享了一个表情识别的项目,收到不少粉丝发来消息询问环境配置方法。许多刚接触的朋友不会配置Python环境,或者由于电脑网络环境的原因有些依赖包不好安装,因此这里给出博主打包好的Python离线环境,供大家移植到自己的电脑上,以便解决环境版本不一致问题。
(1)首先当然是下载好表情识别的代码(见本人博客园博客人脸表情识别系统介绍——上篇(python实现,含UI界面及完整代码)),其下载地址如下,如图所示我们点击页面2.1版本的下载链接,开始下载并解压文件:
下载地址:https://mbd.pub/o/bread/mbd-YpialJ0=
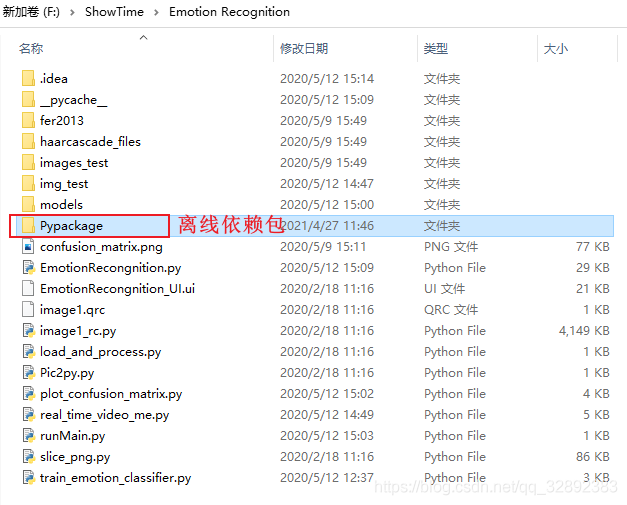
(2)下载并解压后的文件夹如图所示,请最好将它放在一个自己熟悉的且不含中文的文件夹路径中:

(1)博主已经准备好了运行本项目代码所需要的全部Python依赖包,这一步需要大家下载准备好离线的Python环境包。
链接:https://pan.baidu.com/s/1NJS7ufGkPw_b2lor2lockw
提取码:fxrd
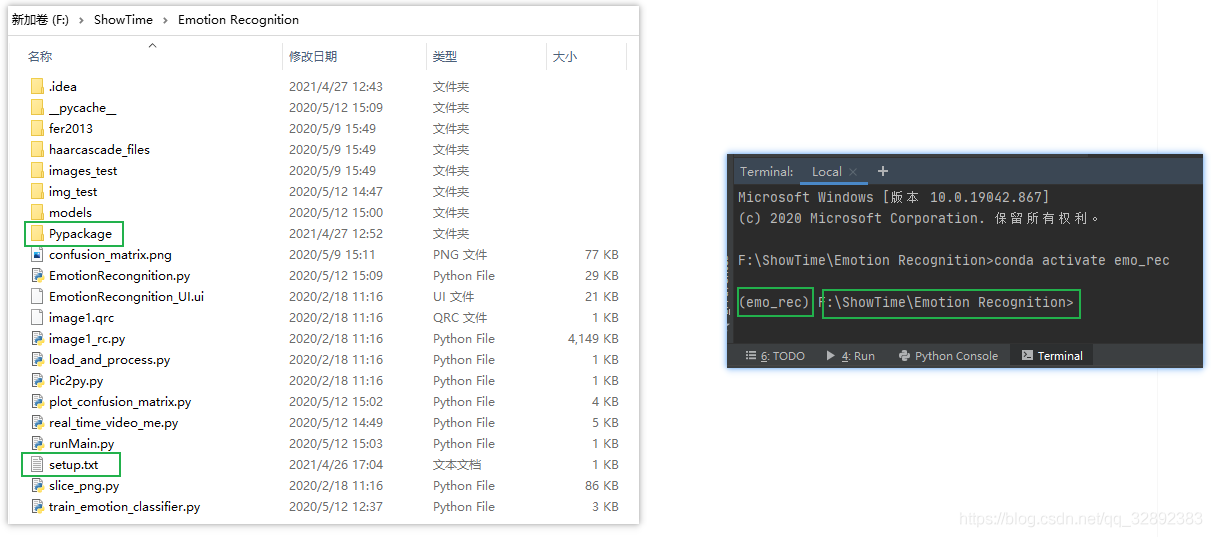
(2)首先点击以上链接下载离线依赖包,并将下载的“Pypackage”文件夹放在上面“Emotion Recognition”文件夹中,即大概如下图所示目录的样子:
在我们配置环境和运行代码之前,PyCharm和Anaconda是必须安装的。尽管PyCharm也是可以安装和管理Python的依赖包的,但是为了方便大家后面配置离线包以及维护便捷,还是请大家安装上Anaconda这款必备神器。对于这两款软件的安装步骤基本就是一路点击Next,安装简单,其教程在网上也有很多,大家可以参考安装。当然我还是推荐采用博主写好的安装教程:PyCharm与Anaconda超详细安装配置教程,里面详细介绍了每一步安装过程。大家点击链接进去照着安装就好了,关于软件的安装这里就不再赘述了。
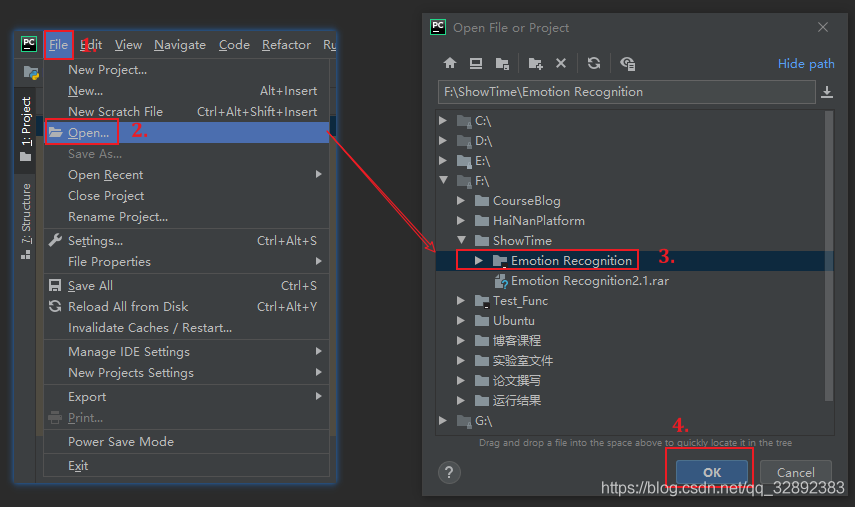
(1)首先我们打开PyCharm,点击左上方菜单栏中的“File”,选择“Open”,在弹出的浏览选项框中选中上节中解压出的文件夹目录(即我们项目代码的文件夹),点击“OK”即可打开该项目,如下图所示:
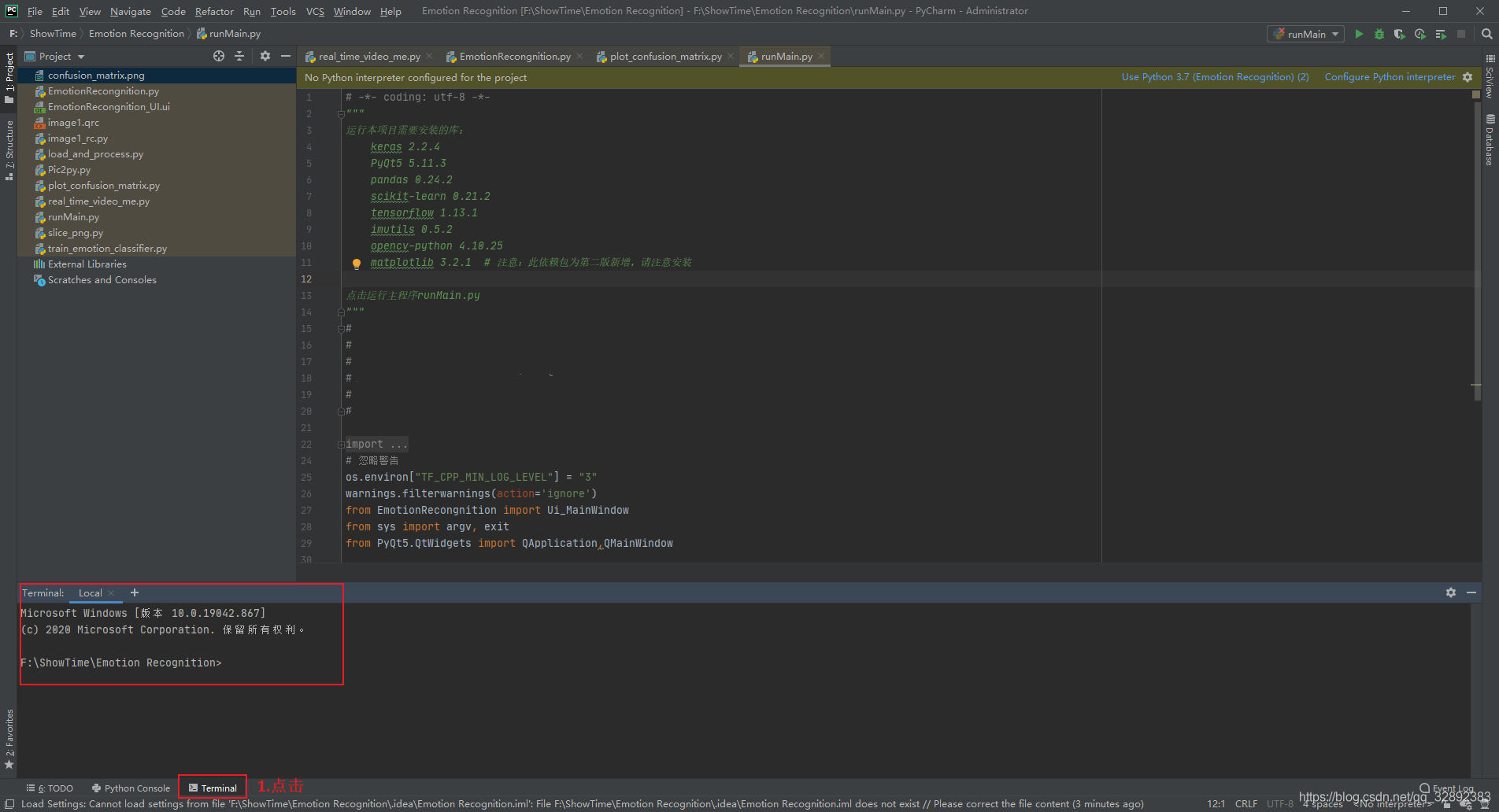
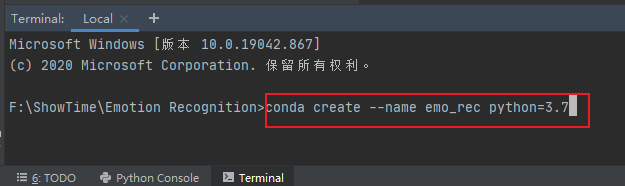
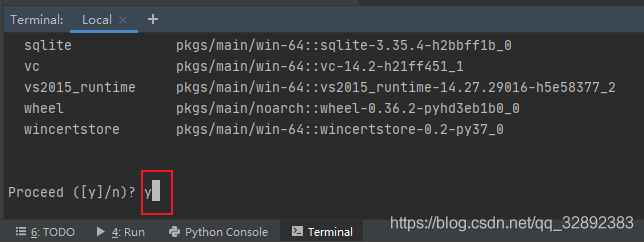
(3)我们首先为这个项目新建一个Conda环境,在终端中输入如下代码,新建一个名为"emo_rec"的环境,并指定Python的版本为3.7(本项目请使用3.7的版本),如下图所示:
conda create --name emo_rec python=3.7
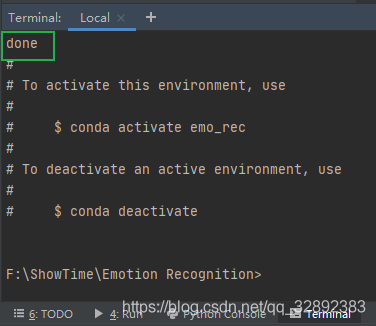
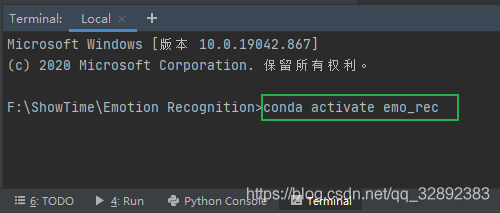
conda activate emo_rec
(1)现在可以开始安装离线依赖包了。首先打开并找到“Pypackage”文件夹中的“setup.txt”文件,它里面已经列好了安装的包和对应版本,以此这里需要将它复制到“Emotion Recognition”文件夹下。
为确保下面的步骤正确进行需要确认几点:第一,“Pypackage”文件夹和“setup.txt”文件处于解压的“Emotion Recognition”文件夹下;第二,终端路径处于“Emotion Recognitive”路径下,第三,终端已处于新建的“emo_rec”环境下,大致如下图所示的样子:
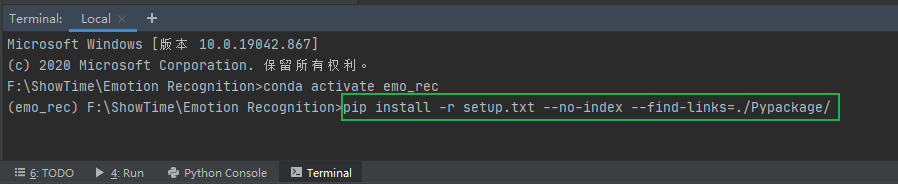
(2)这样我们只需使用pip安装setup.txt文件中列出的依赖包就行了,在当前终端输入如下代码并回车,正式开始离线包的安装。
pip install -r setup.txt --no-index --find-links=./Pypackage/
以上代码的意思是使用pip安装setup.txt文件中列出的包,并且指定了离线安装包的目录在当前目录的Pypackage文件夹下,如下图所示:

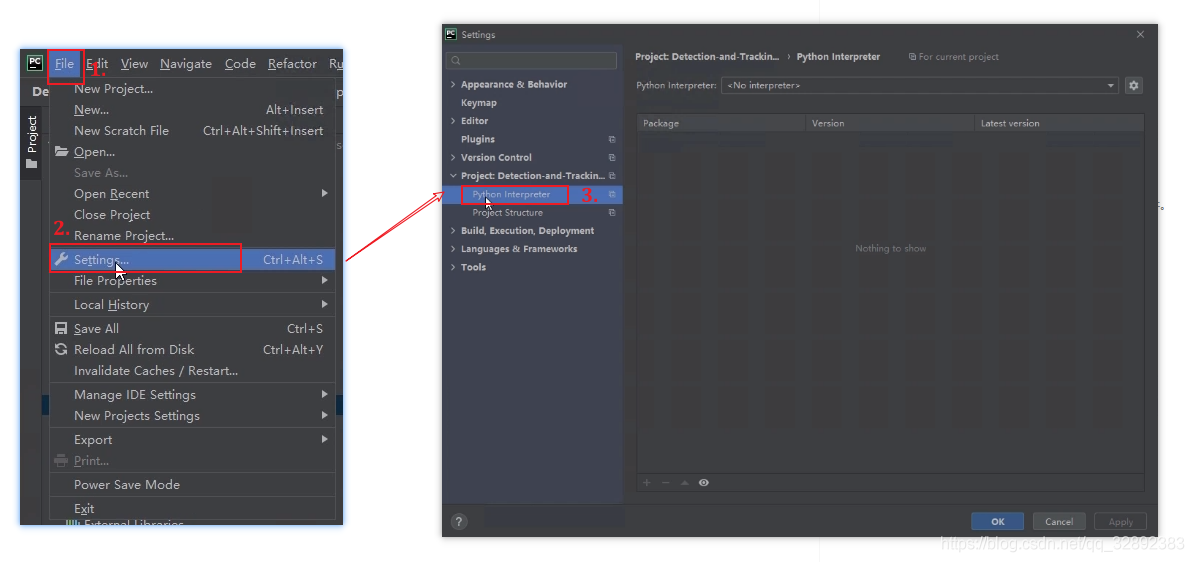
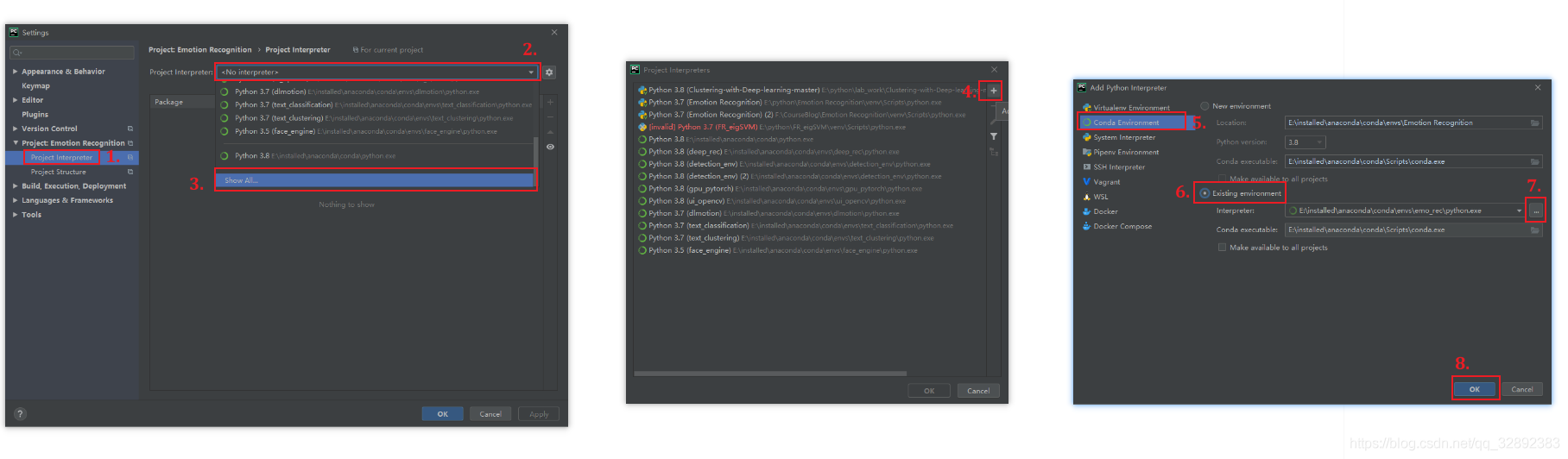
(1)开始配置环境,现在我们只需要在PyCharm中指定刚刚安装好的环境为表情识别项目的运行环境即可。点击“File”菜单,选择“Setting”选项,在“Project”中找到“Python Interpreter”,如果之前没有配置过此时环境显示应该还是空的;
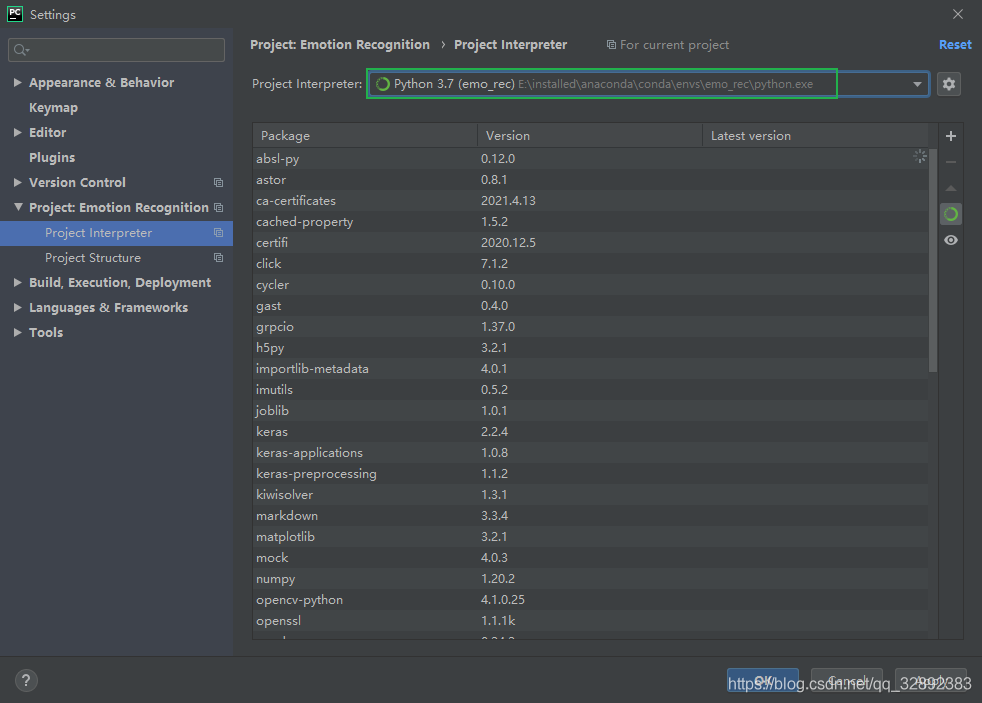
(3)点击OK后,此时安装好的依赖包就都能够在环境界面上看到了,如下图,点击“OK”即可
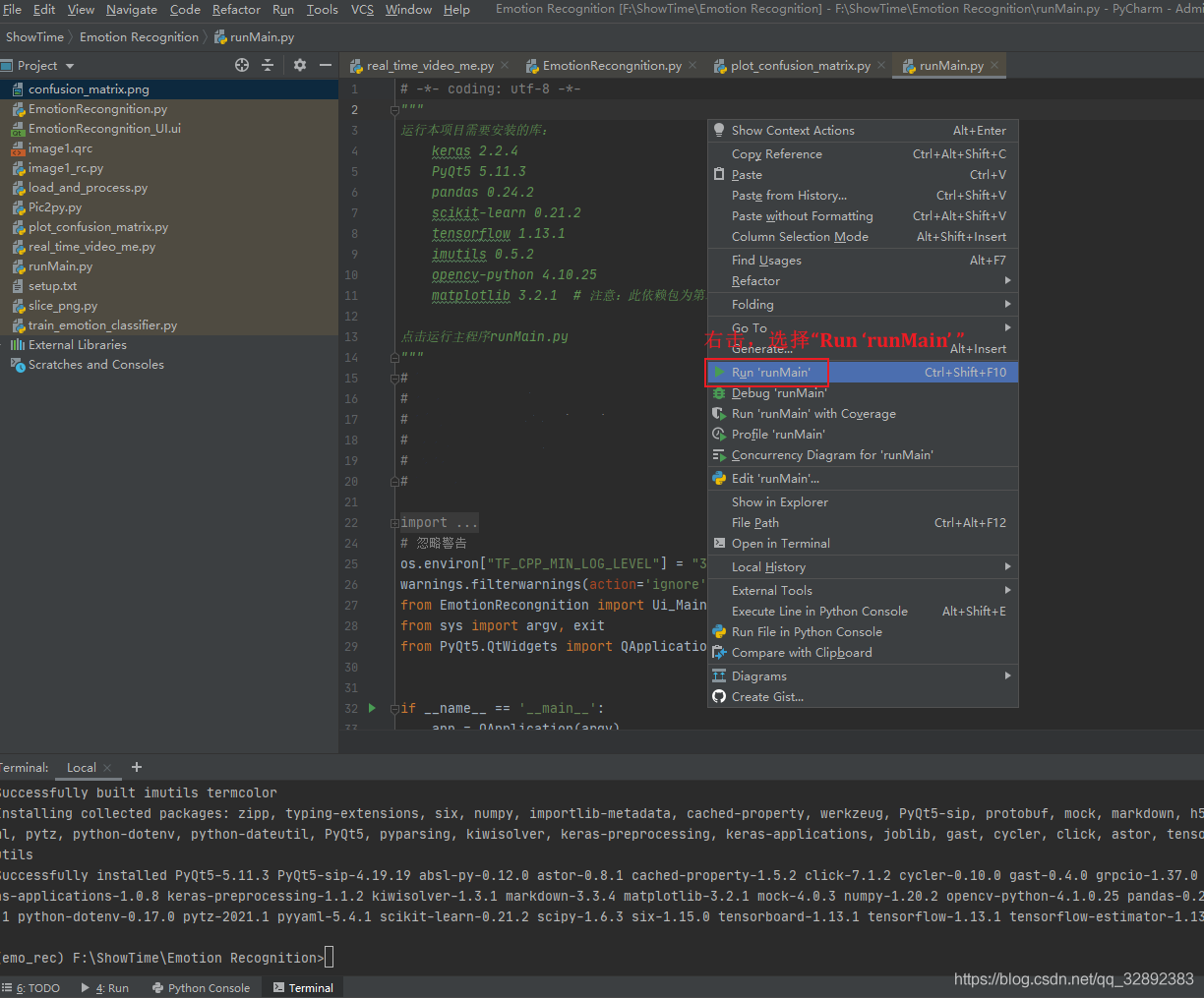
(6)至此程序可以成功运行了,界面如我下面的演示图:
由于博主能力有限,博文中提及的方法即使经过试验,也难免会有疏漏之处。希望您能热心指出其中的错误,以便下次修改时能以一个更完美更严谨的样子,呈现在大家面前。Python软件的安装网上教程也有很多,其安装步骤不必千篇一律,由于多方面因素,不同的人安装也可能不太一样,因此若如出现安装失败的情况也是正常的,保持平常心,解决问题才是最重要的,同时如果有更好的实现方法也请您不吝赐教。
我打算为ruby脚本创建一个安装程序,但我希望能够确保机器安装了RVM。有没有一种方法可以完全离线安装RVM并且不引人注目(通过不引人注目,就像创建一个可以做所有事情的脚本而不是要求用户向他们的bash_profile或bashrc添加一些东西)我不是要脚本本身,只是一个关于如何走这条路的快速指针(如果可能的话)。我们还研究了这个很有帮助的问题:RVM-isthereawayforsimpleofflineinstall?但有点误导,因为答案只向我们展示了如何离线在RVM中安装ruby。我们需要能够离线安装RVM本身,并查看脚本https://raw.github.com/wayn
我有一个在Linux服务器上运行的ruby脚本。它不使用rails或任何东西。它基本上是一个命令行ruby脚本,可以像这样传递参数:./ruby_script.rbarg1arg2如何将参数抽象到配置文件(例如yaml文件或其他文件)中?您能否举例说明如何做到这一点?提前谢谢你。 最佳答案 首先,您可以运行一个写入YAML配置文件的独立脚本:require"yaml"File.write("path_to_yaml_file",[arg1,arg2].to_yaml)然后,在您的应用中阅读它:require"yaml"arg
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
我正在玩HTML5视频并且在ERB中有以下片段:mp4视频从在我的开发环境中运行的服务器很好地流式传输到chrome。然而firefox显示带有海报图像的视频播放器,但带有一个大X。问题似乎是mongrel不确定ogv扩展的mime类型,并且只返回text/plain,如curl所示:$curl-Ihttp://0.0.0.0:3000/pr6.ogvHTTP/1.1200OKConnection:closeDate:Mon,19Apr201012:33:50GMTLast-Modified:Sun,18Apr201012:46:07GMTContent-Type:text/plain
导读语言模型给我们的生产生活带来了极大便利,但同时不少人也利用他们从事作弊工作。如何规避这些难辨真伪的文字所产生的负面影响也成为一大难题。在3月9日智源Live第33期活动「DetectGPT:判断文本是否为机器生成的工具」中,主讲人Eric为我们讲解了DetectGPT工作背后的思路——一种基于概率曲率检测的用于检测模型生成文本的工具,它可以帮助我们更好地分辨文章的来源和可信度,对保护信息真实、防止欺诈等方面具有重要意义。本次报告主要围绕其功能,实现和效果等展开。(文末点击“阅读原文”,查看活动回放。)Ericmitchell斯坦福大学计算机系四年级博士生,由ChelseaFinn和Chri
电脑0x0000001A蓝屏错误怎么U盘重装系统教学分享。有用户电脑开机之后遇到了系统蓝屏的情况。系统蓝屏问题很多时候都是系统bug,只有通过重装系统来进行解决。那么蓝屏问题如何通过U盘重装新系统来解决呢?来看看以下的详细操作方法教学吧。 准备工作: 1、U盘一个(尽量使用8G以上的U盘)。 2、一台正常联网可使用的电脑。 3、ghost或ISO系统镜像文件(Win10系统下载_Win10专业版_windows10正式版下载-系统之家)。 4、在本页面下载U盘启动盘制作工具:系统之家U盘启动工具。 U盘启动盘制作步骤: 注意:制作期间,U盘会被格式化,因此U盘中的重要文件请注
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
?博客主页:https://xiaoy.blog.csdn.net?本文由呆呆敲代码的小Y原创,首发于CSDN??学习专栏推荐:Unity系统学习专栏?游戏制作专栏推荐:游戏制作?Unity实战100例专栏推荐:Unity实战100例教程?欢迎点赞?收藏⭐留言?如有错误敬请指正!?未来很长,值得我们全力奔赴更美好的生活✨------------------❤️分割线❤️-------------------------
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m
之前说过10之后的版本没有3dScan了,所以还是9.8的版本或者之前更早的版本。 3d物体扫描需要先下载扫描的APK进行扫面。首先要在手机上装一个扫描程序,扫描现实中的三维物体,然后上传高通官网,在下载成UnityPackage类型让Unity能够使用这个扫描程序可以从高通官网上进行下载,是一个安卓程序。点到Tools往下滑,找到VuforiaObjectScanner下载后解压数据线连接手机,将apk文件拷入手机安装然后刚才解压文件中的Media文件夹打开,两个PDF图打印第一张A4-ObjectScanningTarget.pdf,主要是用来辅助扫描的。好了,接下来就是扫描三维物体。将瓶