目录
传统的机器视觉通常包括两个步骤:预处理和物体检测。而沟通二者的桥梁则是图像分割(Image Segmentation)。图像分割通过简化或改变图像的表示形式,使得图像更易于分析。简单的图像分割方法是二值化(Binarization)。图像是由矩阵构成,矩阵中每个点的RGB值都不一样,呈现出来的色彩不一样,最终整体呈现给我们的就是一张彩色的图像。所谓”二值化处理“就是将矩阵中每个点的RGB值(0,0,0)或者(255,255,255)。
由于二值图像数据足够简单,许多视觉算法都依赖二值图像。通过二值图像,能更好地分析物体的形状和轮廓。二值图像也常常用作原始图像的掩模(又称遮罩、蒙版,Mask):它就像一张部分镂空的纸,把我们不感兴趣的区域遮掉。进行二值化有多种方式,其中最常用的就是采用全局阈值法、自适应阈值法、OTSU二值化等方法进行二值化。本文对于基于python来实现多种方式的二值化。
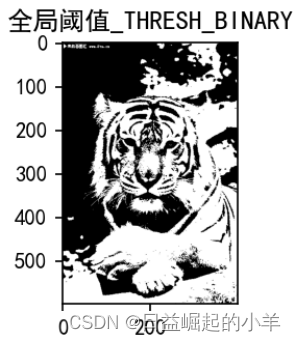
简单阈值是选取一个全局阈值,然后把整幅图像分成非黑即白的二值图像,灰度值大于阈值就赋为255反之为0。
ret,mask = cv2.threshold(a,b,c,d)
参数一a: 初始图像
参数二b:我们自己设定的阈值
参数三c: 当图像像素置超过我们的设定的阈值时赋为255
参数四d : 我们设定的二值化类型
返回值一: 阈值,(Otsu‘s二值化会用到)
返回值二: 处理以后的图像
其中参数四的二值化类型有以下五种:
| 类型 | <阈值 | >阈值 |
| THRESH_BINARY | 置0 | 置填充色 |
| THRESH_BINARY_INV | 置填充色 | 0 |
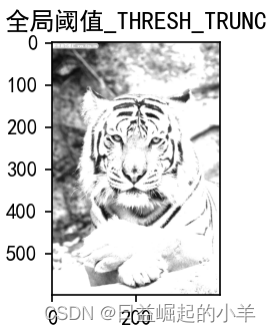
| THRESH_TRUNC | 保持原色 | 置灰色 |
| THRESH_TOZERO | 置0 | 保持原色 |
| THRESH_TOZERO_INV | 保持原色 | 置0 |
| THRESH_MASK |
| |
| THRESH_OTSU | 利用OTSU方法寻找合适的阈值 | |
ret, mask_all = cv2.threshold(src=img, # 要二值化的图片
thresh=127, # 全局阈值
maxval=255, # 大于全局阈值后设定的值
type=cv2.THRESH_BINARY)# 设定的二值化类型,
print("全局阈值的shape: ", mask_all.shape)
plt.subplot(2, 2, 2)
plt.imshow(mask_all, cmap='gray')
plt.show()
plt.title("全局阈值")对整幅图像都是用一个统一的阈值来进行二值化,方法简单易于实现。但是对光照不均匀的图像容易出现错误的二值分割。
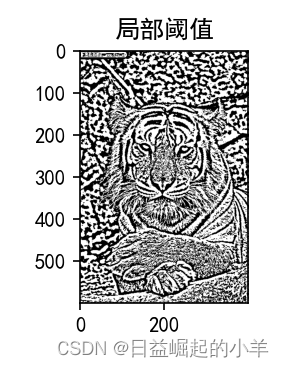
自适应阈值法的原理就是将像素点与该点所在区域的像素的平均值(最大值、中位数等)做比较,大于则赋予255;反之,为0。
h2 = cv.adaptiveThreshold(a,b,c,d,e,f)
返回值: 处理后返回的图像
参数一a: 原始图像
参数二b:像素值上限
参数三c:自适应方法
参数四:赋值方式(参考全局阈值中介绍的表格)
参数五:设定方阵的大小,将一个点与其周围的方阵数据对比,合适的方阵大小对于结果的影像较大。
参数六:常数,每个区域计算出的阈值的基础上在减去这个常数作为这个区域的最终阈值,可以为负数。
mask_local=cv2.adaptiveThreshold(src=img, # 要进行处理的图片
maxValue=255, # 大于阈值后设定的值
adaptiveMethod=cv2.ADAPTIVE_THRESH_MEAN_C,# 自适应方法
thresholdType=cv2.THRESH_BINARY, # 同全局阈值法中的参数一样
blockSize=11, # 方阵(区域)大小,
C=1) # 常数项,
print("局部阈值的shape: ", mask_local.shape)
plt.subplot(2, 2, 3)
plt.imshow(mask_local, cmap='gray')
plt.show()
plt.title("局部阈值")在同一幅图像上的不同区域采用的是不同的阈值,从而使我们能在亮度不同的情况下得到更好的结果。
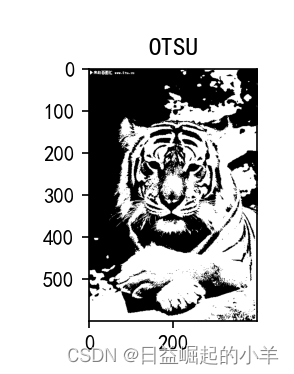
Otsu算法(大津法或最大类间方差法)使用的是聚类的思想,把图像的灰度数按灰度级分成2个部分,使得两个部分之间的灰度值差异最大,每个部分之间的灰度差异最小,(相当于类间保持差异性,类内保持一致性)通过方差的计算来寻找一个合适的灰度级别来划分。 所以可以在二值化的时候采用otsu算法来自动选取阈值进行二值化。otsu算法被认为是图像分割中阈值选取的最佳算法,计算简单,不受图像亮度和对比度的影响。因此,使类间方差最大的分割意味着错分概率最小。
ret2,mask_OTSU=cv2.threshold(img,0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
print("OTSU的shape: ", mask_OTSU.shape)
plt.subplot(2, 2, 4)
plt.imshow(mask_OTSU, cmap='gray')
plt.title("OTSU")
plt.show()类间方差法对噪音和目标大小十分敏感,它仅对类间方差为单峰的图像产生较好的分割效果。当目标与背景的大小比例悬殊时,类间方差准则函数可能呈现双峰或多峰,此时效果不好,但是类间方差法是用时最少的。


https://blog.csdn.net/qq_36686437/article/details/120682663
https://numpy.org/doc/stable/reference/generated/numpy.hstack.html
https://zhuanlan.zhihu.com/p/360824614
https://blog.csdn.net/jjddss/article/details/72841
https://blog.csdn.net/li_l_il/article/details/86767790
https://blog.csdn.net/JNingWei/article/details/77747959
https://blog.csdn.net/weixin_35732969/article/details/83779660
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
我有带有Logo图像的公司模型has_attached_file:logo我用他们的Logo创建了许多公司。现在,我需要添加新样式has_attached_file:logo,:styles=>{:small=>"30x15>",:medium=>"155x85>"}我是否应该重新上传所有旧数据以重新生成新样式?我不这么认为……或者有什么rake任务可以重新生成样式吗? 最佳答案 参见Thumbnail-Generation.如果rake任务不适合你,你应该能够在控制台中使用一个片段来调用重新处理!关于相关公司
这个问题在这里已经有了答案:关闭10年前。PossibleDuplicate:Pythonconditionalassignmentoperator对于这样一个简单的问题表示歉意,但是谷歌搜索||=并不是很有帮助;)Python中是否有与Ruby和Perl中的||=语句等效的语句?例如:foo="hey"foo||="what"#assignfooifit'sundefined#fooisstill"hey"bar||="yeah"#baris"yeah"另外,类似这样的东西的通用术语是什么?条件分配是我的第一个猜测,但Wikipediapage跟我想的不太一样。
什么是ruby的rack或python的Java的wsgi?还有一个路由库。 最佳答案 来自Python标准PEP333:Bycontrast,althoughJavahasjustasmanywebapplicationframeworksavailable,Java's"servlet"APImakesitpossibleforapplicationswrittenwithanyJavawebapplicationframeworktoruninanywebserverthatsupportstheservletAPI.ht
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
我想解析一个已经存在的.mid文件,改变它的乐器,例如从“acousticgrandpiano”到“violin”,然后将它保存回去或作为另一个.mid文件。根据我在文档中看到的内容,该乐器通过program_change或patch_change指令进行了更改,但我找不到任何在已经存在的MIDI文件中执行此操作的库.他们似乎都只支持从头开始创建的MIDI文件。 最佳答案 MIDIpackage会为您完成此操作,但具体方法取决于midi文件的原始内容。一个MIDI文件由一个或多个音轨组成,每个音轨是十六个channel中任何一个上的
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
本文主要介绍在使用Selenium进行自动化测试或者任务时,对于使用了iframe的页面,如何定位iframe中的元素文章目录场景描述解决方案具体代码场景描述当我们在使用Selenium进行自动化测试的时候,可能会遇到一些界面或者窗体是使用HTML的iframe标签进行承载的。对于iframe中的标签,如果直接查找是无法找到的,会抛出没有找到元素的异常。比如近在咫尺的例子就是,CSDN的登录窗体就是使用的iframe,大家可以尝试通过F12开发者模式查看到的tag_name,class_name,id或者xpath来定位中的页面元素,会抛出NoSuchElementException异常。解决
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO