模块名称:HC-05蓝牙串口通信模块
其他模块:USB转TTL模块、杜邦线、蓝牙串口助手app
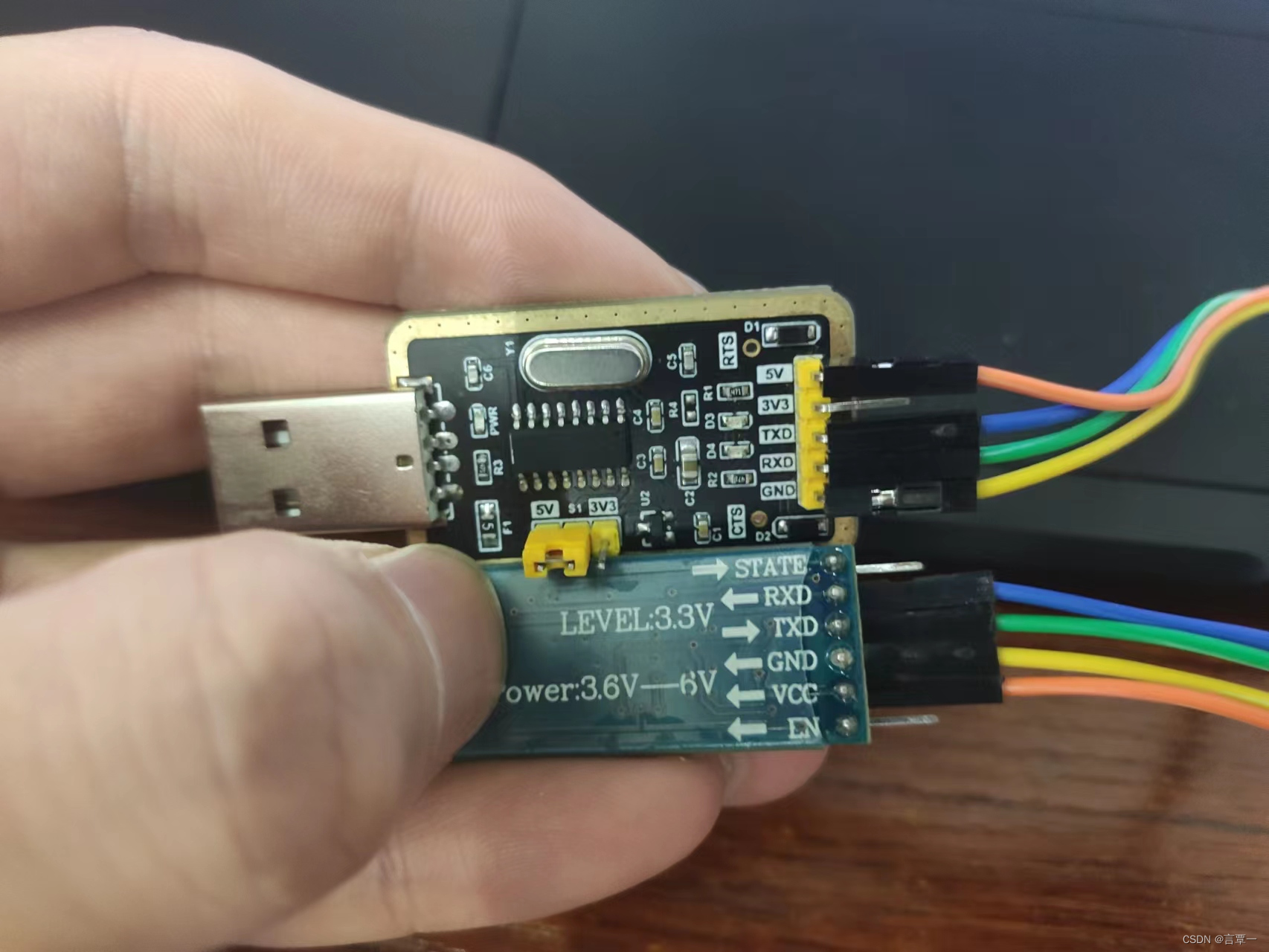
因为我们只是使用到蓝牙模块的透传功能,只需要用到4个引脚(RXT、TXD、GND、VCC)
先使用杜邦线将USB转TTL模块和HC-05蓝牙模块相连
两模块共电、共地、两模块的TX和RX交换相接(USB转TTL的TX(RX)接蓝牙的RX(TX))
如图所示:
然后将USB转TTL模块插到电脑上,通过串口助手进行调试。
蓝牙模块通讯模式有两种工作方式:命令响应工作模式和自动连工作模式(在自动连接工作模式下又可分为主、从和回环三种角色)
·当模块处于自动连接工作模式时,将自动根据事先设定的方式连接的数据传输;
·当模块处于命令响应工作模式时能执行AT命令,用户可向模块发送各种AT 指令,为模块设定控制参数或发布控制命令。
如何进入命令响应:
给模块上电即插USB的时候,按住蓝牙HC-05模块的那个小按键,此时模块进入AT模式
蓝牙模块上有一个小灯,灯快闪的时候,就是自动连接模式。慢闪的时候,就是命令响应工作模式
命令响应模式的波特率固定为38400,可以直接使用串口助手发送AT指令。
AT指令不区分大小写,但是都要以回车符结尾
下面是常用的AT指令
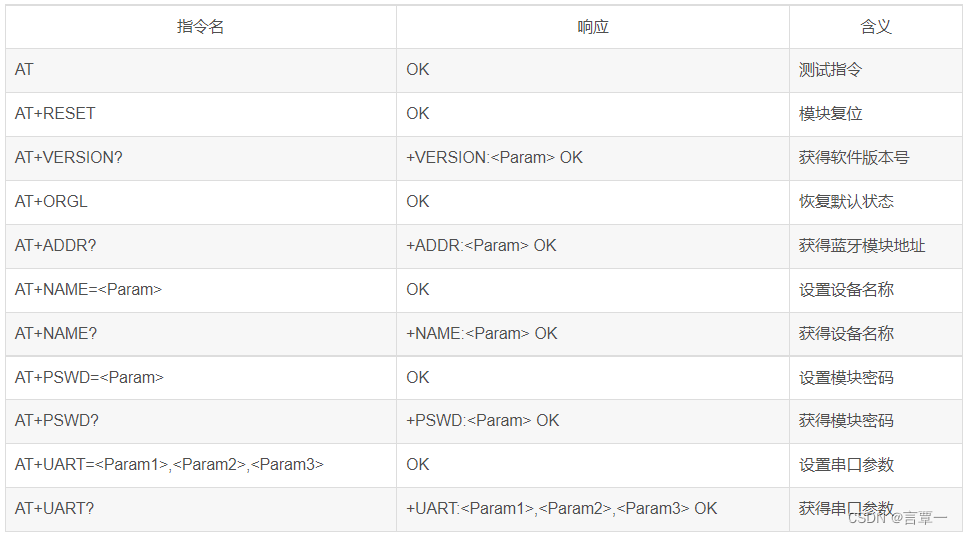
注意:AT+NAME?可能是没有返回数据的,我们直接设置蓝牙名称就可以了
我们接下来主要配置的就是
蓝牙名称和串口参数(波特率、停止位、校验位)
如图:

设置好之后把usb拔下来,重新上电的时候会默认为自动连接模式,此时使用手机的蓝牙助手对蓝牙模块进行连接,就可以通讯了。蓝牙助手我也会放在后面的资料链接里。

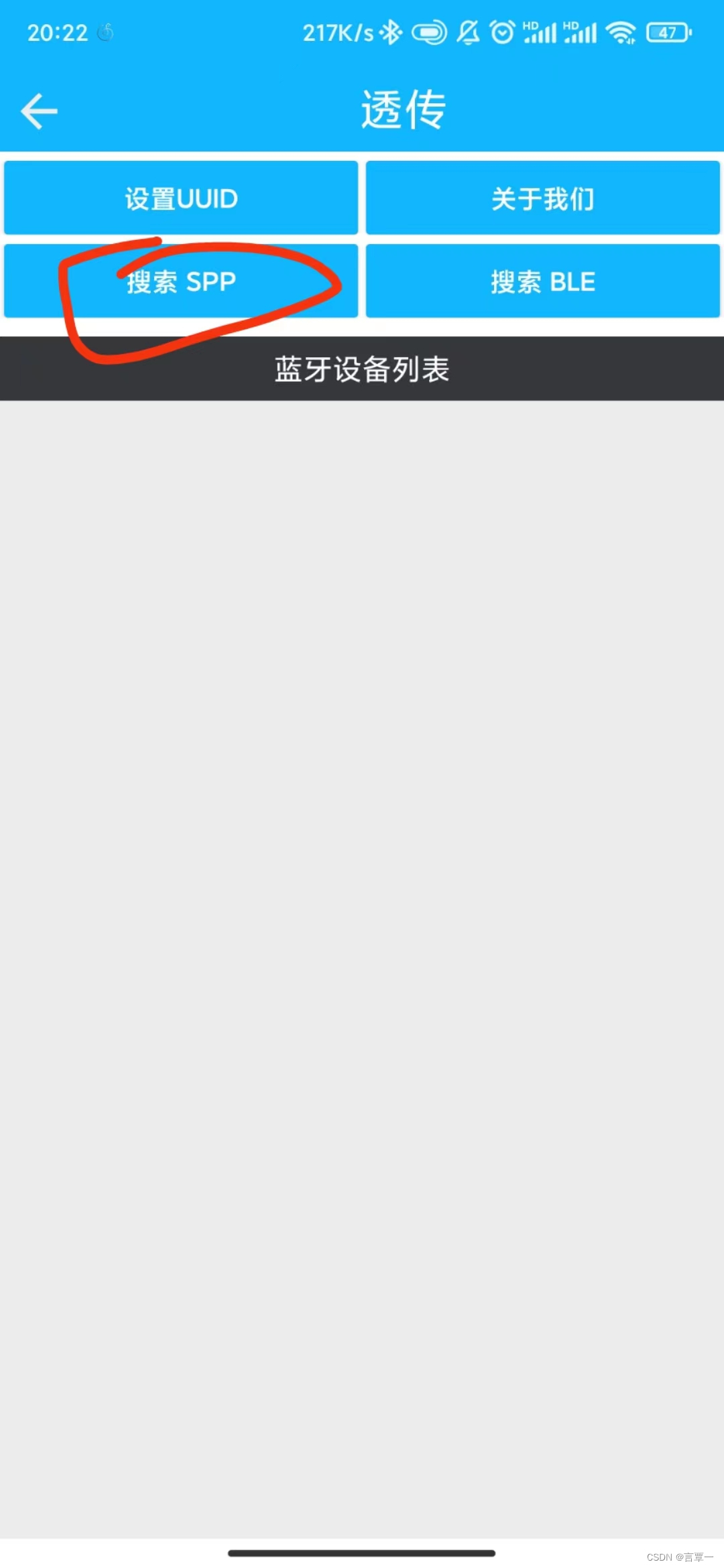
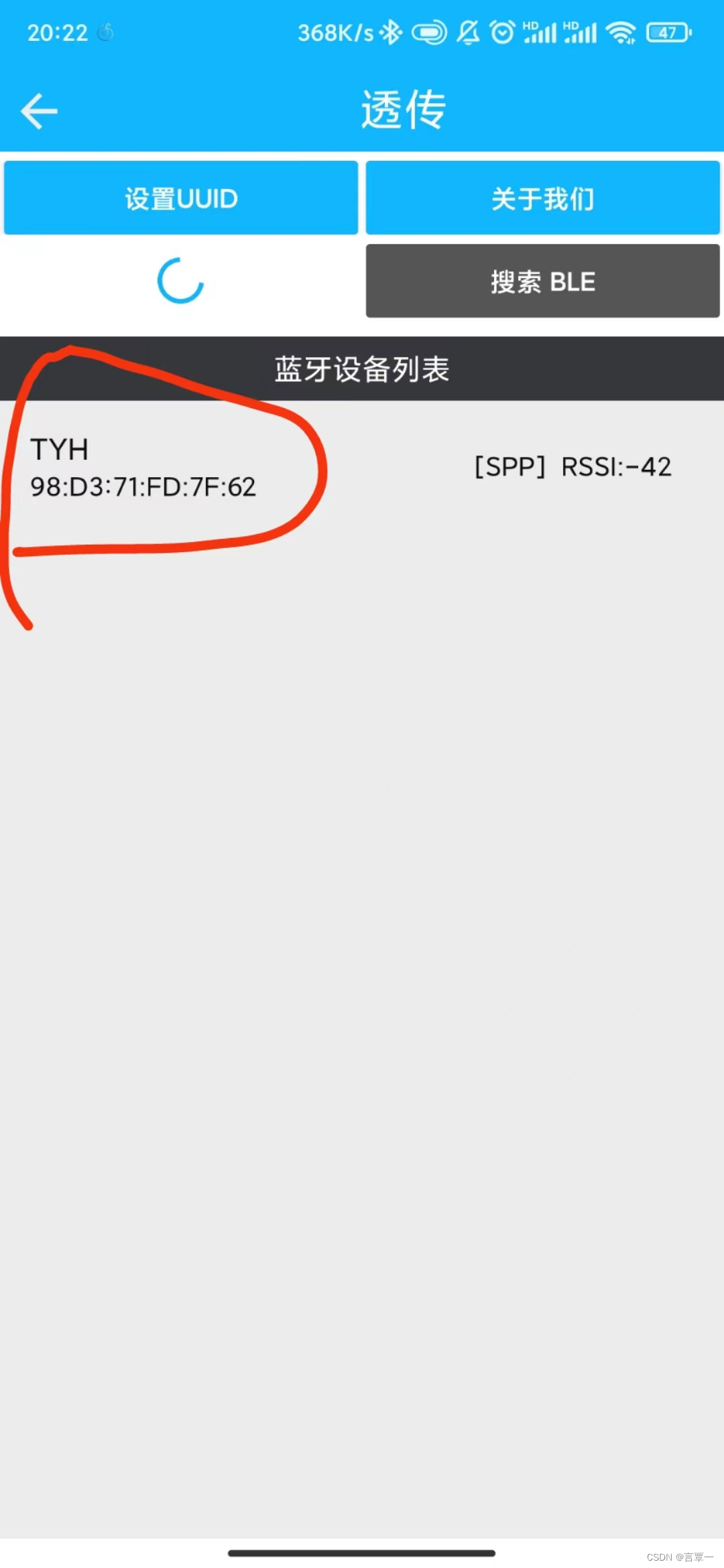

将串口助手波特率设置为115200,在手机蓝牙中发送信息,会在串口助手中显示出来。
源码我将会放在后面的资料里一起打包。
这里我们使用串口1,因为串口1是我开发板的下载串口,所以要先下载代码之后再连接蓝牙模块的TX和RX,如果使用其他串口进行通讯改为其他串口即可,连接方式如图所示:
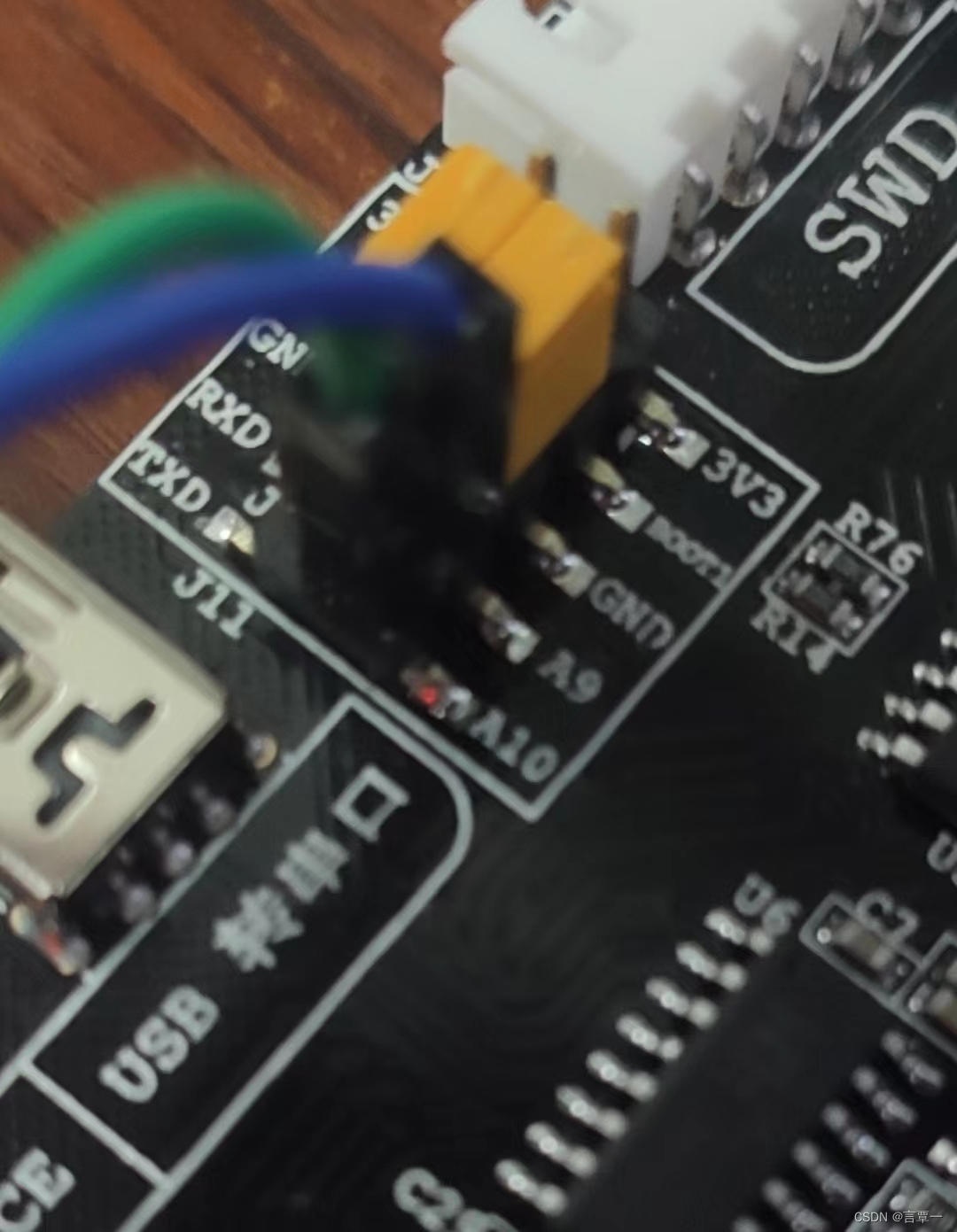
蓝牙模块的RX连PA9,TX连PA10,VCC接板载的5V,GND接板子的GND即可
由于我使用的是野火的开发板,所用到的LED灯是个RGB灯,大家只需要初始化一下串口,然后看一下main函数里面的逻辑来实现自己板子的LED灯即可。也可以在中断函数里对灯进行操作
接下来就可以举一反三,使用蓝牙返回信息等操作了。
资料有需要自行提取:链接:https://pan.baidu.com/s/1iGrbTiivAsTwzd9wDLYFaQ
提取码:3sp6
资料里面还有一个HC蓝牙助手,可以自定义按钮发送信息。
串口控制LED灯的代码如下:
usart.c:
#include "bsp_usart.h"
//static void NVIC_Configuration(void) //配置中断优先级,这里不使用中断,所以屏蔽
//{
// NVIC_InitTypeDef NVIC_InitStructure;
//
// /* 嵌套向量中断控制器组选择 */
// NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//
// /* 配置USART为中断源 */
// NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ;
// /* 抢断优先级*/
// NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
// /* 子优先级 */
// NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
// /* 使能中断 */
// NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
// /* 初始化配置NVIC */
// NVIC_Init(&NVIC_InitStructure);
//}
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// 打开串口GPIO的时钟
#include "stm32f10x.h" // Device header
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
// 打开串口外设的时钟
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
// 将USART Tx的GPIO配置为推挽复用模式
#include "stm32f10x.h" // Device header
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将USART Rx的GPIO配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
// 配置 针数据字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(DEBUG_USARTx, &USART_InitStructure);
// // 串口中断优先级配置
// NVIC_Configuration();
//
// // 使能串口接收中断
// USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE);
// 使能串口
USART_Cmd(DEBUG_USARTx, ENABLE);
}
/* 发送一个字节 */
void Usart_SendByte(USART_TypeDef* pUSARTx, uint8_t data)
{
USART_SendData(pUSARTx, data);
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET );
}
/* 发送两个字节的数据 */
void Usart_SendHalfWord(USART_TypeDef* pUSARTx, uint16_t data)
{
uint8_t temp_h,temp_l;
temp_h = (data&0xff00) >> 8 ;
temp_l = data&0xff;
USART_SendData(pUSARTx, temp_h);
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET );
USART_SendData(pUSARTx, temp_l);
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET );
}
/* 发送8位数据的数组 */
void Usart_SendArray(USART_TypeDef* pUSARTx, uint8_t *array,uint8_t num)
{
uint8_t i;
for( i=0; i<num; i++ )
{
Usart_SendByte(pUSARTx, array[i]);
}
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET );
}
/* 发送字符串 */
void Usart_SendStr(USART_TypeDef* pUSARTx, uint8_t *str)
{
uint8_t i=0;
do
{
Usart_SendByte(pUSARTx, *(str+i));
i++;
}while(*(str+i) != '\0');
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET );
}
///重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
/* 发送一个字节数据到串口 */
USART_SendData(DEBUG_USARTx, (uint8_t) ch);
/* 等待发送完毕 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
return (ch);
}
///重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{
/* 等待串口输入数据 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(DEBUG_USARTx);
}
main.c
int main(void)
{
uint8_t ch;
USART_Config();
LED_GPIO_Config();
printf( "这是一个串口控制RGB灯的程序\n" );
while (1)
{
ch = getchar();
printf( "ch=%c\n",ch );
switch(ch)
{
case '1': LED_RED;
break;
case '2': LED_GREEN;
break;
case '3': LED_BLUE;
break;
default: LED_RGBOFF;
break;
}
}
}led.c
#include "bsp_led.h"
/**
* @brief 初始化控制LED的IO
* @param 无
* @retval 无
*/
void LED_GPIO_Config(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启LED相关的GPIO外设时钟*/
RCC_APB2PeriphClockCmd( LED1_GPIO_CLK | LED2_GPIO_CLK | LED3_GPIO_CLK, ENABLE);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED1_GPIO_PIN;
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置引脚速率为50MHz */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化GPIO*/
GPIO_Init(LED1_GPIO_PORT, &GPIO_InitStructure);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED2_GPIO_PIN;
/*调用库函数,初始化GPIO*/
GPIO_Init(LED2_GPIO_PORT, &GPIO_InitStructure);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED3_GPIO_PIN;
/*调用库函数,初始化GPIOF*/
GPIO_Init(LED3_GPIO_PORT, &GPIO_InitStructure);
/* 关闭所有led灯 */
GPIO_SetBits(LED1_GPIO_PORT, LED1_GPIO_PIN);
/* 关闭所有led灯 */
GPIO_SetBits(LED2_GPIO_PORT, LED2_GPIO_PIN);
/* 关闭所有led灯 */
GPIO_SetBits(LED3_GPIO_PORT, LED3_GPIO_PIN);
}
/*********************************************END OF FILE**********************/
假设我做了一个模块如下:m=Module.newdoclassCendend三个问题:除了对m的引用之外,还有什么方法可以访问C和m中的其他内容?我可以在创建匿名模块后为其命名吗(就像我输入“module...”一样)?如何在使用完匿名模块后将其删除,使其定义的常量不再存在? 最佳答案 三个答案:是的,使用ObjectSpace.此代码使c引用你的类(class)C不引用m:c=nilObjectSpace.each_object{|obj|c=objif(Class===objandobj.name=~/::C$/)}当然这取决于
作为我的Rails应用程序的一部分,我编写了一个小导入程序,它从我们的LDAP系统中吸取数据并将其塞入一个用户表中。不幸的是,与LDAP相关的代码在遍历我们的32K用户时泄漏了大量内存,我一直无法弄清楚如何解决这个问题。这个问题似乎在某种程度上与LDAP库有关,因为当我删除对LDAP内容的调用时,内存使用情况会很好地稳定下来。此外,不断增加的对象是Net::BER::BerIdentifiedString和Net::BER::BerIdentifiedArray,它们都是LDAP库的一部分。当我运行导入时,内存使用量最终达到超过1GB的峰值。如果问题存在,我需要找到一些方法来更正我的代
我有一个包含模块的模型。我想在模块中覆盖模型的访问器方法。例如:classBlah这显然行不通。有什么想法可以实现吗? 最佳答案 您的代码看起来是正确的。我们正在毫无困难地使用这个确切的模式。如果我没记错的话,Rails使用#method_missing作为属性setter,因此您的模块将优先,阻止ActiveRecord的setter。如果您正在使用ActiveSupport::Concern(参见thisblogpost),那么您的实例方法需要进入一个特殊的模块:classBlah
我正在查看instance_variable_set的文档并看到给出的示例代码是这样做的:obj.instance_variable_set(:@instnc_var,"valuefortheinstancevariable")然后允许您在类的任何实例方法中以@instnc_var的形式访问该变量。我想知道为什么在@instnc_var之前需要一个冒号:。冒号有什么作用? 最佳答案 我的第一直觉是告诉你不要使用instance_variable_set除非你真的知道你用它做什么。它本质上是一种元编程工具或绕过实例变量可见性的黑客攻击
在我的应用程序中,我需要能够找到所有数字子字符串,然后扫描每个子字符串,找到第一个匹配范围(例如5到15之间)的子字符串,并将该实例替换为另一个字符串“X”。我的测试字符串s="1foo100bar10gee1"我的初始模式是1个或多个数字的任何字符串,例如,re=Regexp.new(/\d+/)matches=s.scan(re)给出["1","100","10","1"]如果我想用“X”替换第N个匹配项,并且只替换第N个匹配项,我该怎么做?例如,如果我想替换第三个匹配项“10”(匹配项[2]),我不能只说s[matches[2]]="X"因为它做了两次替换“1fooX0barXg
当我在Rails控制台中按向上或向左箭头时,出现此错误:irb(main):001:0>/Users/me/.rvm/gems/ruby-2.0.0-p247/gems/rb-readline-0.4.2/lib/rbreadline.rb:4269:in`blockin_rl_dispatch_subseq':invalidbytesequenceinUTF-8(ArgumentError)我使用rvm来管理我的ruby安装。我正在使用=>ruby-2.0.0-p247[x86_64]我使用bundle来管理我的gem,并且我有rb-readline(0.4.2)(人们推荐的最少
我正在使用Ruby2.1.1和Rails4.1.0.rc1。当执行railsc时,它被锁定了。使用Ctrl-C停止,我得到以下错误日志:~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.2/lib/spring/client/run.rb:47:in`gets':Interruptfrom~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.2/lib/spring/client/run.rb:47:in`verify_server_version'from~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.
我将我的Rails应用程序部署到OpenShift,它运行良好,但我无法在生产服务器上运行“Rails控制台”。它给了我这个错误。我该如何解决这个问题?我尝试更新rubygems,但它也给出了权限被拒绝的错误,我也无法做到。railsc错误:Warning:You'reusingRubygems1.8.24withSpring.UpgradetoatleastRubygems2.1.0andrun`gempristine--all`forbetterstartupperformance./opt/rh/ruby193/root/usr/share/rubygems/rubygems
我刚刚被困在这个问题上一段时间了。以这个基地为例:moduleTopclassTestendmoduleFooendend稍后,我可以通过这样做在Foo中定义扩展Test的类:moduleTopmoduleFooclassSomeTest但是,如果我尝试通过使用::指定模块来最小化缩进:moduleTop::FooclassFailure这失败了:NameError:uninitializedconstantTop::Foo::Test这是一个错误,还是仅仅是Ruby解析变量名的方式的逻辑结果? 最佳答案 Isthisabug,or
我有一个正在构建的应用程序,我需要一个模型来创建另一个模型的实例。我希望每辆车都有4个轮胎。汽车模型classCar轮胎模型classTire但是,在make_tires内部有一个错误,如果我为Tire尝试它,则没有用于创建或新建的activerecord方法。当我检查轮胎时,它没有这些方法。我该如何补救?错误是这样的:未定义的方法'create'forActiveRecord::AttributeMethods::Serialization::Tire::Module我测试了两个环境:测试和开发,它们都因相同的错误而失败。 最佳答案