private void updatePoiMatrix(Position pcbPoi,Position poi1, Position poi2,Position takePhotoPoi)
{
//更新对应的数组
imagePoiList.Add(new Position() { X = (poi1.X + poi2.X) / 2, Y = (poi1.Y + poi2.Y) / 2 });
//dstPoi- takePhotoPoi,获取takePhoto的J1与J2,
System.Windows.Point p1=new System.Windows.Point();
p1.X = pcbPoi.X - takePhotoPoi.X;
p1.Y = pcbPoi.Y - takePhotoPoi.Y;
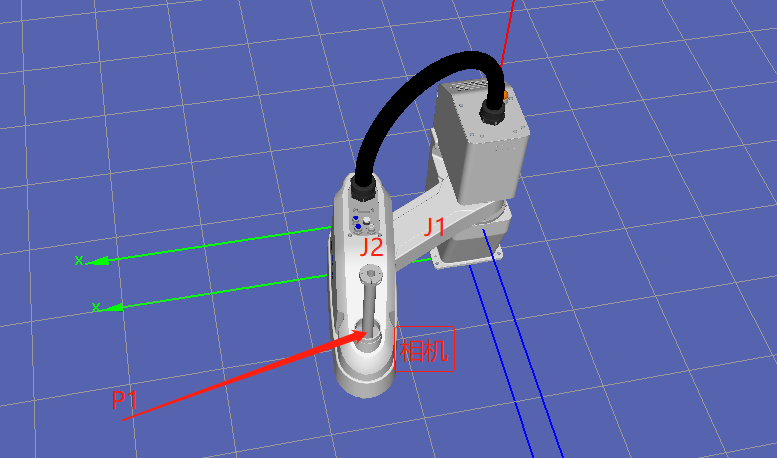
var jAngles=this.currentRobot.GetJAngle();
double angleJ = -jAngles[0] - jAngles[1];
System.Windows.Point p2= MatrixHelper.GetRotatePoint(p1, angleJ, new System.Windows.Point() { X = 0, Y = 0 });
Position newDstPoi = new Position();
newDstPoi.X = p2.X;
newDstPoi.Y = p2.Y;
robotPoiList.Add(newDstPoi);
}
/// <summary>
/// 逆时针旋转,获取旋转后的点位
/// </summary>
/// <param name="p1">待旋转的点</param>
/// <param name="angle">旋转角度</param>
/// <param name="center">旋转中心</param>
/// <returns></returns>
public static Point GetRotatePoint(Point p1, double angle, Point center)
{
//使用旋转矩阵求值
RotateTransform rotateTransform = new RotateTransform(angle, center.X, center.Y);
Point p = new Point(p1.X, p1.Y);
System.Windows.Point p2 = rotateTransform.Transform(p);
return p2;
}
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
1.postman介绍Postman一款非常流行的API调试工具。其实,开发人员用的更多。因为测试人员做接口测试会有更多选择,例如Jmeter、soapUI等。不过,对于开发过程中去调试接口,Postman确实足够的简单方便,而且功能强大。2.下载安装官网地址:https://www.postman.com/下载完成后双击安装吧,安装过程极其简单,无需任何操作3.使用教程这里以百度为例,工具使用简单,填写URL地址即可发送请求,在下方查看响应结果和响应状态码常用方法都有支持请求方法:getpostputdeleteGet、Post、Put与Delete的作用get:请求方法一般是用于数据查询,
📢博客主页:https://blog.csdn.net/weixin_43197380📢欢迎点赞👍收藏⭐留言📝如有错误敬请指正!📢本文由Loewen丶原创,首发于CSDN,转载注明出处🙉📢现在的付出,都会是一种沉淀,只为让你成为更好的人✨文章预览:一.分辨率(Resolution)1、工业相机的分辨率是如何定义的?2、工业相机的分辨率是如何选择的?二.精度(Accuracy)1、像素精度(PixelAccuracy)2、定位精度和重复定位精度(RepeatPrecision)三.公差(Tolerance)四.课后作业(Post-ClassExercises)视觉行业的初学者,甚至是做了1~2年
我最喜欢的Google文档功能之一是它会在我工作时不断自动保存我的文档版本。这意味着即使我在进行关键更改之前忘记在某个点进行保存,也很有可能会自动创建一个保存点。至少,我可以将文档恢复到错误更改之前的状态,并从该点继续工作。对于在MacOS(或UNIX)上运行的Ruby编码器,是否有具有等效功能的工具?例如,一个工具会每隔几分钟自动将Gitcheckin我的本地存储库以获取我正在处理的文件。也许我有点偏执,但这点小保险可以让我在日常工作中安心。 最佳答案 虚拟机有些人可能讨厌我对此的回应,但我在编码时经常使用VIM,它具有自动保存功
我正在尝试上传文件。一个简单的hello.txt。我正在关注文档,但无法将其上传到我的存储桶。#STARTAWSCLIENTs3=Aws::S3::Resource.newbucket=s3.bucket(BUCKET_NAME)begins3.buckets[BUCKET_NAME].objects[KEY].write(:file=>FILE_NAME)puts"Uploadingfile#{FILE_NAME}tobucket#{BUCKET_NAME}."bucket.objects.eachdo|obj|puts"#{obj.key}=>#{obj.etag}"endresc
我有一个Highstock图表(带有标记和阴影的线条),并且想以编程方式显示一个highstock工具提示,例如,当我选择某个表上的一行(包含图表数据)我想显示相应的highstock工具提示。这可能吗? 最佳答案 股票图表thissolution不起作用:在thisexample你必须更换这个:chart.tooltip.refresh(chart.series[0].data[i]);为此:chart.tooltip.refresh([chart.series[0].points[i]]);解决方案可用here.
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
我是syslog的新手。我们决定使用系统日志来跟踪Rails应用程序中的一些特殊事件。问题是我不想使用默认的/var/log/system.log文件,而是使用自定义文件,例如/var/log/myapp_events.log.我看到我必须像这样在/etc/syslog.conf中定义我自己的设施:myapp_events.*/var/log/myapp_events.log重新启动syslogd后,我发现我可以直接在bash控制台中使用它:syslog-s-kFacilitymyapp_eventsMessage"thisismymessage"该消息按预期出现在/var/log/m
目前我有一小套针对我的网络服务器运行的集成测试,它发出请求并断言一些关于响应应该是什么的假设。这些是用Ruby编写的,生成http请求。我一直在看Gatling作为压力测试工具,但我想知道它是否也可以用于集成测试。这样,所有端点请求都可以在压力测试和集成测试中重复使用。我可能在这里失去了一些东西,因为没有RSpec的BDD,但不必两次创建相同的测试。有没有人有这样使用gatling的经验? 最佳答案 您可以使用AssertionAPI并设置验收标准。但是,Gatling不是浏览器,不会运行/测试您的Javascript,因此这种方法