 我们已经知道,特斯拉准备升级其自动驾驶硬件已有一段时间了。特斯拉此前向联邦通信委员会申请在其车辆上增加一个新的雷达,并称计划在 1 月份开始销售,新的雷达将意味着特斯拉计划更新其 Autopilot 和 FSD 的传感器套件。硬件变化对特斯拉车主来说是一种压力,因为该汽车制造商一直承诺,其自 2016 年以来制造的所有车辆都具备通过软件更新实现自动驾驶所需的所有硬件。事实证明并非如此,因为特斯拉需要更强大的计算机,于是推出了 HW3,不过该公司也确实向现有车主免费提供了升级。特斯拉首席执行官埃隆-马斯克此前已经证实,特斯拉将不提供对 HW4 的免费升级,但他表示仍然计划用 HW3 实现其自动驾驶的承诺,HW4 只会将性能推得更高。博主 Green The Only 设法从一辆新的 Model X 汽车上获得了一个新的 HW4 电脑,并对其进行了拆解。他表示对比 HW3.0,4.0 硬件尺寸变大了,接口完全不一样,之前的 3.0 无法升级,这也符合之前马斯克的说法。
我们已经知道,特斯拉准备升级其自动驾驶硬件已有一段时间了。特斯拉此前向联邦通信委员会申请在其车辆上增加一个新的雷达,并称计划在 1 月份开始销售,新的雷达将意味着特斯拉计划更新其 Autopilot 和 FSD 的传感器套件。硬件变化对特斯拉车主来说是一种压力,因为该汽车制造商一直承诺,其自 2016 年以来制造的所有车辆都具备通过软件更新实现自动驾驶所需的所有硬件。事实证明并非如此,因为特斯拉需要更强大的计算机,于是推出了 HW3,不过该公司也确实向现有车主免费提供了升级。特斯拉首席执行官埃隆-马斯克此前已经证实,特斯拉将不提供对 HW4 的免费升级,但他表示仍然计划用 HW3 实现其自动驾驶的承诺,HW4 只会将性能推得更高。博主 Green The Only 设法从一辆新的 Model X 汽车上获得了一个新的 HW4 电脑,并对其进行了拆解。他表示对比 HW3.0,4.0 硬件尺寸变大了,接口完全不一样,之前的 3.0 无法升级,这也符合之前马斯克的说法。 特斯拉的自动驾驶电脑与信息娱乐电脑结合在一起,后者也在这次
HW4 升级中得到了更新。Green 在谈到这一变化时说:“与目前的设备相比,信息娱乐系统被重新设计了。GPU 现在在同一块板上,所以不再有
GPU 子板。这使得整个装置更薄,其它没有变化 —— 同样的 256G NVMe 存储和 16G 内存,同样的 AMD CPU 和 GPU。”
特斯拉的自动驾驶电脑与信息娱乐电脑结合在一起,后者也在这次
HW4 升级中得到了更新。Green 在谈到这一变化时说:“与目前的设备相比,信息娱乐系统被重新设计了。GPU 现在在同一块板上,所以不再有
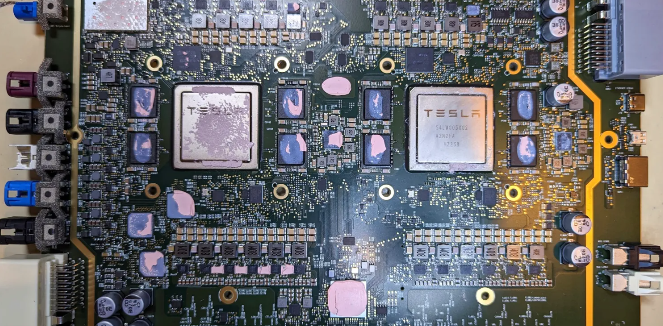
GPU 子板。这使得整个装置更薄,其它没有变化 —— 同样的 256G NVMe 存储和 16G 内存,同样的 AMD CPU 和 GPU。” 至于特斯拉 HW4 计算机本身,Green 称其升级幅度比其预期的更小,仍然基于三星 Exynos-IP,不过这次将 CPU 内核从 12 个增加到 20 个(5 个集群,每个集群 4 个内核),最大频率为 2.35GHz,闲置频率为 1.37GHz,TRIP 内核数量从 2 个增加到 3 个,2.2GHz 最大频率。不过他注意到,HW4 在安全方面有一些改进。但同时新的电路板在空闲时比 HW3 有更高的耗电量,此外特斯拉还对系统的冗余度进行了改进,配置都是双份,主板的整体设计也是非常对称,这在自动驾驶汽车中显然很重要。
至于特斯拉 HW4 计算机本身,Green 称其升级幅度比其预期的更小,仍然基于三星 Exynos-IP,不过这次将 CPU 内核从 12 个增加到 20 个(5 个集群,每个集群 4 个内核),最大频率为 2.35GHz,闲置频率为 1.37GHz,TRIP 内核数量从 2 个增加到 3 个,2.2GHz 最大频率。不过他注意到,HW4 在安全方面有一些改进。但同时新的电路板在空闲时比 HW3 有更高的耗电量,此外特斯拉还对系统的冗余度进行了改进,配置都是双份,主板的整体设计也是非常对称,这在自动驾驶汽车中显然很重要。 传感器方面,主板的接口可以给我们提供更多关于 HW4 中新传感器的信息。特斯拉一直在向基于视觉(摄像头)的方法发展,曾大张旗鼓地取消了其雷达和超声波传感器。而 HW4 显示,特斯拉似乎要增加更多的摄像头。目前,特斯拉的硬件套件中有 8 个摄像头,但现在新电脑有 12 个摄像头的接口,尽管一个接口被标记为“备用”。从接口的命名推测来看,特斯拉会把前挡风摄像头改为两个,同时新增两个侧摄像头以及一个前杠摄像头,暗示特斯拉有可能提供 360 环视功能。此外,GPS 模块应该也有所升级,现在是三频 GPS 天线模块。最后,Green 还发现了特斯拉将雷达重新整合到其传感器套件中的证据,HW4.0 有前向雷达以及雷达加热系统。IT之家了解到,马斯克在去年 6 月特斯拉停止使用其雷达后曾称,纯视觉的安全性会比视觉 + 雷达高,而不是低。视觉已经变得如此之好,以至于雷达实际上减少了信号 / 噪音。不过他也表示,如果有一个“非常高分辨率的雷达”,特斯拉仍可能使用雷达。目前还不清楚特斯拉计划何时正式发布新的 HW4,但 3 月 1 日投资者日可能是一个好时机。
传感器方面,主板的接口可以给我们提供更多关于 HW4 中新传感器的信息。特斯拉一直在向基于视觉(摄像头)的方法发展,曾大张旗鼓地取消了其雷达和超声波传感器。而 HW4 显示,特斯拉似乎要增加更多的摄像头。目前,特斯拉的硬件套件中有 8 个摄像头,但现在新电脑有 12 个摄像头的接口,尽管一个接口被标记为“备用”。从接口的命名推测来看,特斯拉会把前挡风摄像头改为两个,同时新增两个侧摄像头以及一个前杠摄像头,暗示特斯拉有可能提供 360 环视功能。此外,GPS 模块应该也有所升级,现在是三频 GPS 天线模块。最后,Green 还发现了特斯拉将雷达重新整合到其传感器套件中的证据,HW4.0 有前向雷达以及雷达加热系统。IT之家了解到,马斯克在去年 6 月特斯拉停止使用其雷达后曾称,纯视觉的安全性会比视觉 + 雷达高,而不是低。视觉已经变得如此之好,以至于雷达实际上减少了信号 / 噪音。不过他也表示,如果有一个“非常高分辨率的雷达”,特斯拉仍可能使用雷达。目前还不清楚特斯拉计划何时正式发布新的 HW4,但 3 月 1 日投资者日可能是一个好时机。 这个问题在这里已经有了答案:Checktoseeifanarrayisalreadysorted?(8个答案)关闭9年前。我只是想知道是否有办法检查数组是否在增加?这是我的解决方案,但我正在寻找更漂亮的方法:n=-1@arr.flatten.each{|e|returnfalseife
我们有一个目前在Rails2.3.12版和Ruby1.8.7版上运行的应用程序。我们想将我们的应用程序更新到Rails4.0和Ruby2.1.0。我们有大约200个模型和150个Controller。我想知道升级过程需要多大的努力。您还可以提供升级可以遵循的步骤。我们应该先升级Ruby然后再升级Rails还是相反? 最佳答案 您想要实现的目标将是史诗般的努力。我无法为您提供分步说明,因为不可能在一个答案中涵盖所有情况。我建议不要同时升级Ruby和Rails,而是分步升级。升级本身的复杂性是巨大的,但只要您的应用程序具有合理的测试覆盖
我有一个页面,有时加载时间超过一分钟。假设这是预期的行为并且不会改变。在这些情况下,我得到Net::ReadTimeout。请注意,这是在通过单击上一页上的按钮导航到页面之后,而不是ajax请求。因此Capybara.using_wait_time没有帮助。我尝试了一些激进的方法(其中一些我知道行不通),例如:设置page.driver.browser.manage.timeouts的implicit_wait、script_timeout和page_load。遍历整个对象空间并设置所有Selenium::WebDriver::Remote::Http::Default的timeout
这让我发疯!我有两个模型Lion和Cheetah。两者都继承自Wildcat。classWildcat这里用的是STI。它们都通过ControllerWildcatsController进行处理。在那里,我有一个before_filer从params[:type]和所有其他东西中获取wildcat的type以使用正确的类.在我的routes.rb中,我创建了以下路线:resources:lions,controller:'wildcats',type:'Lion'resources:cheetahs,controller:'wildcats',type:'Cheetah'如果我现在想使
如果我尝试增加哈希中尚不存在的键的值,就像这样h=Hash.newh[:ferrets]+=1我收到以下错误:NoMethodError:undefinedmethod`+'fornil:NilClass这对我来说很有意义,而且我知道这一定是一个非常简单的问题,但我在SO上找不到它。如果我什至事先不知道我将拥有哪些key,我该如何添加和递增此类key? 最佳答案 可以在构造函数中设置hash的默认值h=Hash.new(0)h[:ferrets]+=1ph[:ferrets]请注意,设置默认值有一些缺陷,因此您必须谨慎使用。h=Ha
我正在使用rest-client发布到一个非常慢的网络服务。我将timeout设置为600秒,并且我已经确认它正在传递给Net::HTTP的@read_timeout和@open_timeout.但是,大约两分钟后,我收到一个低级超时错误,Errno::ETIMEDOUT:Connectiontimedout-connect(2):回溯的相关部分是Operationtimedout-connect(2)for[myhost]port[myport]/Users/dmoles/.rvm/rubies/ruby-2.2.5/lib/ruby/2.2.0/net/http.rb:879:in
相机内参标定,相机和激光雷达联合标定一、相机标定原理1.1成像过程1.2标定详解二、相机和激光雷达联合标定2.1标定方法汇总2.2Autoware的安装与运行2.2.1安装方式2.2.2安装Autoware的依赖(Ubuntu16.04/kinetic)2.2.3编译Autoware1.创造工作空间2.下载Autoware源码3.其他依赖4.编译5.效果2.3Autoware标定激光雷达和相机的外参过程一、相机标定原理1.1成像过程现实物体在相机中的成像过程离不开世界坐标系、相机坐标系、图像坐标系以及像素坐标系,只有理解了这些才能对获取的图像进行准确的分析。成像过程:四个坐标系如下图所示:世界
我想知道是否有人在使用Rails4.0中的haml-railsgem时遇到过任何问题。有一个RailsCast那说有一些问题,但没有更多提及这一点。托管在GitHub上的gem也没有明确提及对Rails4.0的支持。那么这方面的进展如何? 最佳答案 我在Rails4项目中使用haml-rails(0.4),一切正常 关于ruby-on-rails-rails4.0上的haml-rails?,我们在StackOverflow上找到一个类似的问题: https:/
这是我在Rails中的第一个项目,即创建一个表来存储有关游戏的数据。我能够显示表格中有关获胜者得分、失败者得分等的数据。但是,我的表格列存在问题,其中包含每个游戏的删除链接。这是我在游戏Controller中删除方法的代码:defdelete@game=Game.find(params[:game])@game.destroy()redirect_to:action=>'index'end我的表格代码片段,其中包括link_to命令的行在我调用的路由文件中resources:games据我所知,这有助于生成基本路由。谁能帮我弄清楚为什么我的link_to不起作用?
高科技摄像头特别是海康萤石摄像头,已经不再只局限于简单的视频功能,特别是智能AI的普及,摄像头也华丽变身成了一个个独立的智能个体,可以实现人脸抓拍,人形检测,客流统计等店铺值守场景,也可以实现安全帽识别,车辆识别,非法入侵识别等智慧工地场景。但用户也许会问,摄像头又不会说话,他得知的这些信息怎么告诉我们,还是说需要配一个主机去处理,这成本又有点太高了。这点正是萤石云要为大家解决的,下面来介绍下如何让设备更简便智能的说话。API(应用程序编程接口)提供应用程序与开发人员基于某软件或硬件得以访问一组例程的能力。形象一点API可以理解为一个管道,通过该管道,可以传入约定好的命令,来获得摄像头的反馈,