当输入包含d个特征,预测结果表示为:

记x为样本的特征向量,w为权重向量,上式可表示为:
对于含有n个样本的数据集,可用X来表示n个样本的特征集合,其中行代表样本,列代表特征,那么预测值可用矩阵乘法表示为:

给定训练数据特征X和对应的已知标签y,线性回归的⽬标是找到⼀组权重向量w和偏置b:当给定从X的同分布中取样的新样本特征时,这组权重向量和偏置能够使得新样本预测标签的误差尽可能小。
损失函数又称代价函数(cost function),通常用其来度量目标的实际值和预测值之间的误差。在回归问题中,常用的损失函数为平方误差函数:


我们的目标便是求得最小化损失函数下参数w和b的值:

求解上式,一般有以下两种方式:
1> 正规方程(解析解)

2> 梯度下降(gradient descent)
(1)初始化模型参数的值,如随机初始化;
(2)从数据集中随机抽取小批量样本且在负梯度的方向上更新参数,并不断迭代这一步骤。

上式中:n表示每个小批量中的样本数,也称批量大小(batch size)、α表示学习率(learning rate),n和α的值需要手动预先指定,而不是模型训练得到的,这类参数称为超参数(hyperparameter),选择超参数的过程称为调参(hyperparameter tuning)。
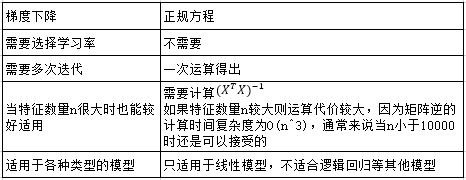
梯度下降和正规方程比较:
为了加快模型训练速度,可以采用矢量化计算的方式,这通常会带来数量级的加速。下边用代码简单对比测试下矢量化计算的加速效果。
import math
import time
import numpy as np
import torch
from d2l import torch as d2l
# a、b是全为1的10000维向量
n = 10000
a = torch.ones(n)
b = torch.ones(n)
class Timer:
def __init__(self):
"""记录多次运行时间"""
self.tik = None
self.times = []
self.start()
def start(self):
"""启动计时器"""
self.tik = time.time()
def stop(self):
"""停止计时器并将时间记录在列表中"""
self.times.append(time.time() - self.tik)
return self.times[-1]
def avg(self):
"""返回平均时间"""
return sum(self.times) / len(self.times)
def sum(self):
"""返回总时间"""
return sum(self.times)
def cumsum(self):
"""返回总时间"""
return np.array(self.times).cumsum().tolist()
c = torch.zeros(n)
timer = Timer()
for i in range(n):
c[i] = a[i] + b[i]
print(f'{timer.stop():.5f} sec')
timer.start()
d = a + b
print(f'{timer.stop():.5f} sec')
代码运行结果如下,可见矢量化代码确实极大的提高了计算速度。

注:这里矢量化计算d=a+b的时间不知道为什么统计出来是0,可能是跟电脑的计时器精度有关。
线性回归的实现过程可以简单总结为以下几个步骤:
(1)读取数据(或构造数据),转换成需要的格式和类型,并生成标签 ;
(2)定义初始化模型参数、定义模型、定义损失函数、定义优化算法;
(3)使用优化算法训练模型。
import random
import torch
import numpy as np
from matplotlib import pyplot as plt
from d2l import torch as d2l
# 构造数据集
def synthetic_data(w, b, num_examples):
"""生成 y = Xw + b + 噪声。"""
# 均值为0,方差为1的随机数,行数为样本数,列数是w的长度(行代表样本,列代表特征)
X = torch.normal(0, 1, (num_examples, len(w))) # pytorch较新版本
# X = torch.tensor(np.random.normal(0, 1, (num_examples, len(w))), dtype=torch.float32) # pytorch1.1.0版本
y = torch.matmul(X, w) + b
# 均值为0,方差为1的随机数,噪声项。
y += torch.normal(0, 0.01, y.shape) # pytorch较新版本
# y += torch.tensor(np.random.normal(0, 0.01, y.shape), dtype=torch.float32) # pytorch1.1.0版本
return X, y.reshape((-1, 1))
true_w = torch.tensor([2, -3.4])
true_b = 4.2
features, labels = synthetic_data(true_w, true_b, 1000)
print('features:', features[0], '\nlabel:', labels[0])
d2l.set_figsize()
d2l.plt.scatter(features[:, 1].detach().numpy(), labels.detach().numpy(), 1)
# 生成一个data_iter函数,该函数接收批量大小、特征矩阵和标签向量作为输入,生成大小为batch_size的小批量
def data_iter(batch_size, features, labels):
num_examples = len(features)
indices = list(range(num_examples))
# 这些样本是随机读取的,没有特定的顺序
random.shuffle(indices)
for i in range(0, num_examples, batch_size):
batch_indices = torch.tensor(indices[i:min(i+batch_size, num_examples)])
yield features[batch_indices], labels[batch_indices]
batch_size = 10
for X, y in data_iter(batch_size, features, labels):
print(X, '\n', y)
break
# 定义初始化模型参数
w = torch.normal(0, 0.01, size=(2, 1), requires_grad=True) # pytorch较新版本
# w = torch.autograd.Variable(torch.tensor(np.random.normal(0, 0.01, size=(2, 1)),
# dtype=torch.float32), requires_grad=True) # pytorch1.1.0版本
b = torch.zeros(1, requires_grad=True)
# 定义模型
def linreg(X, w, b):
"""线性回归模型。"""
return torch.matmul(X, w) + b
# 定义损失函数
def squared_loss(y_hat, y):
"""均方损失。"""
return (y_hat - y.reshape(y_hat.shape))**2 / 2
# 定义优化算法
def sgd(params, lr, batch_size):
"""小批量随机梯度下降"""
with torch.no_grad():
for param in params:
param -= lr * param.grad / batch_size
param.grad.zero_()
# 训练过程
lr = 0.03
num_epochs = 3
net = linreg
loss = squared_loss
for epoch in range(num_epochs):
for X, y in data_iter(batch_size, features, labels):
l = loss(net(X, w, b), y) # X和y的小批量损失
# 因为l形状是(batch_size, 1),而不是一个标量。l中的所有元素被加到一起并以此来计算关于[w, b]的梯度
l.sum().backward()
sgd([w, b], lr, batch_size) # 使用参数的梯度更新参数
with torch.no_grad():
train_l = loss(net(features, w, b), labels)
print(f'epoch {epoch + 1}, loss {float(train_l.mean()):f}')
print(f'w的估计误差:{true_w - w.reshape(true_w.shape)}')
print(f'b的估计误差:{true_b - b}')
使用PyTorch封装的高级API可以快速高效的实现线性回归
import numpy as np
import torch
from torch import nn # 'nn'是神经网路的缩写
from torch.utils import data
from d2l import torch as d2l
# 构造数据集
def synthetic_data(w, b, num_examples):
"""生成 y = Xw + b + 噪声。"""
# 均值为0,方差为1的随机数,行数为样本数,列数是w的长度(行代表样本,列代表特征)
X = torch.normal(0, 1, (num_examples, len(w))) # pytorch较新版本
# X = torch.tensor(np.random.normal(0, 1, (num_examples, len(w))), dtype=torch.float32) # pytorch1.1.0版本
y = torch.matmul(X, w) + b
# 均值为0,方差为1的随机数,噪声项。
y += torch.normal(0, 0.01, y.shape) # pytorch较新版本
# y += torch.tensor(np.random.normal(0, 0.01, y.shape), dtype=torch.float32) # pytorch1.1.0版本
return X, y.reshape((-1, 1))
true_w = torch.tensor([2, -3.4])
true_b = 4.2
features, labels = synthetic_data(true_w, true_b, 1000)
d2l.set_figsize()
d2l.plt.scatter(features[:, 1].detach().numpy(), labels.detach().numpy(), 1)
# 调用框架中现有的API来读取数据
def load_array(data_arrays, batch_size, is_train=True):
"""构造一个PyTorch数据迭代器"""
dataset = data.TensorDataset(*data_arrays)
return data.DataLoader(dataset, batch_size, shuffle=is_train)
batch_size = 10
data_iter = load_array((features, labels), batch_size)
print(next(iter(data_iter)))
# 使用框架预定义好的层
net = nn.Sequential(nn.Linear(2, 1))
# 初始化模型参数(等价于前边手动实现w、b以及network的方式)
net[0].weight.data.normal_(0, 0.01) # 使用正态分布替换掉w的值
net[0].bias.data.fill_(0)
# 计算均方误差使用MSELoss类,也称为平方L2范数
loss = nn.MSELoss()
# 实例化SGD实例
trainer = torch.optim.SGD(net.parameters(), lr=0.03)
# 训练
num_epochs = 3 # 迭代三个周期
for epoch in range(num_epochs):
for X, y in data_iter:
l = loss(net(X), y)
trainer.zero_grad() # 优化器,先将梯度清零
l.backward()
trainer.step() # 模型更新
l = loss(net(features), labels)
print(f'epoch {epoch + 1}, loss {l:f}')
w = net[0].weight.data
print('w的估计误差:', true_w - w.reshape(true_w.shape))
b = net[0].bias.data
print('b的估计误差:', true_b - b)
1. torch.normal()报错,这个是由于PyTorch版本问题,torch.normal()函数的参数形式和用法有所变化。

要生成均值为0且方差为1的随机数,pytorch1.1.0和pytorch1.9.0可以分别采用以下形式:
# pytorch1.9.0 X = torch.normal(0, 1, (num_examples, len(w))) # pytorch1.1.0(也适用于高版本) X = torch.tensor(np.random.normal(0, 1, (num_examples, len(w))), dtype=torch.float32)
2. d2l库安装报错。这个我在公司电脑上直接一行pip install d2l成功安装,回家换自己电脑,各种报错。解决之后发现大多都是找不到安装源、缺少相关库或者库版本不兼容的问题。
安装方式:conda install d2l 或 pip install d2l。网速太慢下不下来可以选择国内源镜像:
pip install d2l -i http://pypi.douban.com/simple/ --trusted-host pypi.douban.com
国内常用源镜像:
# 清华:https://pypi.tuna.tsinghua.edu.cn/simple # 阿里云:http://mirrors.aliyun.com/pypi/simple/ # 中国科技大学 https://pypi.mirrors.ustc.edu.cn/simple/ # 华中理工大学:http://pypi.hustunique.com/ # 山东理工大学:http://pypi.sdutlinux.org/ # 豆瓣:http://pypi.douban.com/simple/
需要注意的是:有时候使用conda install d2l命令无法下载,改为pip 命令后即可下载成功。这是因为有些包只能通过pip安装。Anaconda提供超过1,500个软件包,包括最流行的数据科学、机器学习和AI框架,这与PyPI上提供的150,000多个软件包相比,只是一小部分。
Python官方安装whl包和tar.gz包安装方法:
安装whl包:pip install wheel,pip install xxx.whl
安装tar.gz包:cd到解压后路径,python setup.py install
[1] Python错误笔记(2)之Pytorch的torch.normal()函数
[2] 动手学深度学习 李沐
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
深度学习部署:Windows安装pycocotools报错解决方法1.pycocotools库的简介2.pycocotools安装的坑3.解决办法更多Ai资讯:公主号AiCharm本系列是作者在跑一些深度学习实例时,遇到的各种各样的问题及解决办法,希望能够帮助到大家。ERROR:Commanderroredoutwithexitstatus1:'D:\Anaconda3\python.exe'-u-c'importsys,setuptools,tokenize;sys.argv[0]='"'"'C:\\Users\\46653\\AppData\\Local\\Temp\\pip-instal
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
通常,数组被实现为内存块,集合被实现为HashMap,有序集合被实现为跳跃列表。在Ruby中也是如此吗?我正在尝试从性能和内存占用方面评估Ruby中不同容器的使用情况 最佳答案 数组是Ruby核心库的一部分。每个Ruby实现都有自己的数组实现。Ruby语言规范只规定了Ruby数组的行为,并没有规定任何特定的实现策略。它甚至没有指定任何会强制或至少建议特定实现策略的性能约束。然而,大多数Rubyist对数组的性能特征有一些期望,这会迫使不符合它们的实现变得默默无闻,因为实际上没有人会使用它:插入、前置或追加以及删除元素的最坏情况步骤复
我完全不是程序员,正在学习使用Ruby和Rails框架进行编程。我目前正在使用Ruby1.8.7和Rails3.0.3,但我想知道我是否应该升级到Ruby1.9,因为我真的没有任何升级的“遗留”成本。缺点是什么?我是否会遇到与普通gem的兼容性问题,或者甚至其他我不太了解甚至无法预料的问题? 最佳答案 你应该升级。不要坚持从1.8.7开始。如果您发现不支持1.9.2的gem,请避免使用它们(因为它们很可能不被维护)。如果您对gem是否兼容1.9.2有任何疑问,您可以在以下位置查看:http://www.railsplugins.or