井下无人机长时间在恶劣环境下执行勘测、救援任务,通讯系统可能会陷入两难的境地——传输高精度坐标伴随着大量耗能。为解决这项难题,中国矿业大学计算机科学和技术学院陈朋朋教授团队提出了一种基于超宽带(UWB)和惯性测量单元(IMU)融合的按需精确跟踪框架(On-demand Precise Tracking)。
OPT对井下无人机的通讯耗能实现了按需分配,并且在精确测距、抗多径效应和穿透能力方面优势显著。
首先,设计了基于多传感器融合的无迹卡尔曼滤波器,实现具有定制性能的能量高效跟踪。其次,OPT提供了一种超宽带信号传输的自适应调整机制,以在井下无人机本地定位的精度和能耗之间进行权衡。最后,提出了一种用于无人机远程跟踪的按需触发算法,以确定数据是否传输到地面服务器。特别是在复杂的煤矿中,由于丢包的存在,对按需触发条件进行改进。
OPT模型在Gazebo平台上进行了大量模拟实验。并在室内和井下实验室,采用P440超宽带进行了实地实验,通过NOKOV度量动捕系统获取数据真值,验证其可行性。
井下无人机追踪实验由4个位置已知的UWB基站,以及1个搭载UWB移动节点和IMU的无人机组成。8个NOKOV度量 MARS镜头分别固定在室内房间及巷道四周,实时提供亚毫米精度的位置信息,作为OPT追踪性能的评价标准。

室内无人机定位实验

井下巷道无人机定位实验
无人机分别在室内和巷道内飞行,UWB移动节点不断与周围的4个UWB基站进行通信以提供无人机到基站的距离信息,IMU提供无人机的加速度以及角速度信息,从而利用OPT进行无人机的位置追踪。
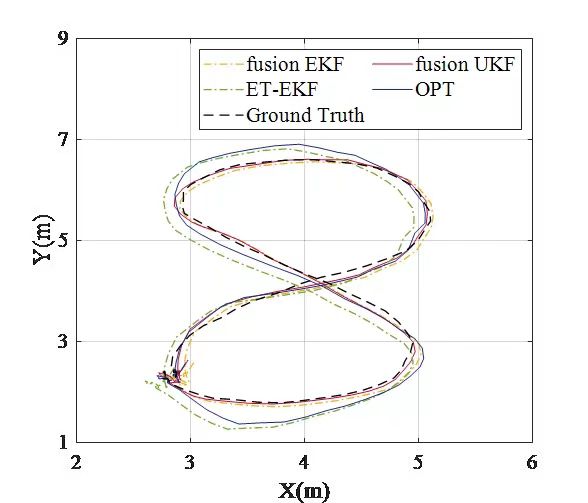
井下无人机远程追踪飞行轨迹图
结果表明,OPT能够在降低40%通信率的情况下,提供0.3米的追踪精度,并降低20%的通信能量消耗。实现了低耗能高精度的井下无人机作业。
参考文献:
[1] K. Zhang, P. Chen, T. Ma and S. Gao, "On-Demand Precise Tracking for Energy-Constrained UAVs in Underground Coal Mines," in IEEE Transactions on Instrumentation and Measurement, vol. 71, pp. 1-14, 2022, Art no. 5500814, doi: 10.1109/TIM.2022.3146925.
电脑0x0000001A蓝屏错误怎么U盘重装系统教学分享。有用户电脑开机之后遇到了系统蓝屏的情况。系统蓝屏问题很多时候都是系统bug,只有通过重装系统来进行解决。那么蓝屏问题如何通过U盘重装新系统来解决呢?来看看以下的详细操作方法教学吧。 准备工作: 1、U盘一个(尽量使用8G以上的U盘)。 2、一台正常联网可使用的电脑。 3、ghost或ISO系统镜像文件(Win10系统下载_Win10专业版_windows10正式版下载-系统之家)。 4、在本页面下载U盘启动盘制作工具:系统之家U盘启动工具。 U盘启动盘制作步骤: 注意:制作期间,U盘会被格式化,因此U盘中的重要文件请注
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
因为我现在正在做一些时间测量,我想知道是否可以在不使用Benchmark类或命令行实用程序time的情况下测量用户时间或系统时间。使用Time类只显示挂钟时间,而不显示系统和用户时间,但是我正在寻找具有相同灵active的解决方案,例如time=TimeUtility.now#somecodeuser,system,real=TimeUtility.now-time原因是我有点不喜欢Benchmark,因为它不能只返回数字(编辑:我错了-它可以。请参阅下面的答案。)。当然,我可以解析输出,但感觉不对。*NIX系统的time实用程序也应该可以解决我的问题,但我想知道是否已经在Ruby中实
在Ruby中,以毫秒为单位获取自纪元(1970)以来的当前系统时间的正确方法是什么?我试过了Time.now.to_i,好像不是我想要的结果。我需要结果显示毫秒并且使用long类型,而不是float或double。 最佳答案 (Time.now.to_f*1000).to_iTime.now.to_f显示包含十进制数字的时间。要获得毫秒数,只需将时间乘以1000。 关于ruby-以毫秒为单位获取当前系统时间,我们在StackOverflow上找到一个类似的问题:
我正在使用Ruby解决一些ProjectEuler问题,特别是这里我要讨论的问题25(Fibonacci数列中包含1000位数字的第一项的索引是多少?)。起初,我使用的是Ruby2.2.3,我将问题编码为:number=3a=1b=2whileb.to_s.length但后来我发现2.4.2版本有一个名为digits的方法,这正是我需要的。我转换为代码:whileb.digits.length当我比较这两种方法时,digits慢得多。时间./025/problem025.rb0.13s用户0.02s系统80%cpu0.190总计./025/problem025.rb2.19s用户0.0
我正在寻找一个用ruby演示计时器的在线示例,并发现了下面的代码。它按预期工作,但这个简单的程序使用30Mo内存(如Windows任务管理器中所示)和太多CPU有意义吗?非常感谢deftime_blockstart_time=Time.nowThread.new{yield}Time.now-start_timeenddefrepeat_every(seconds)whiletruedotime_spent=time_block{yield}#Tohandle-vesleepinteravalsleep(seconds-time_spent)iftime_spent
如果用户是所有者,我有一个条件来检查说删除和文章。delete_articleifuser.owner?另一种方式是user.owner?&&delete_article选择它有什么好处还是它只是一种写作风格 最佳答案 性能不太可能成为该声明的问题。第一个要好得多-它更容易阅读。您future的自己和其他将开始编写代码的人会为此感谢您。 关于ruby-on-rails-如果条件与&&,是否有任何性能提升,我们在StackOverflow上找到一个类似的问题:
关闭。这个问题需要更多focused.它目前不接受答案。想改进这个问题吗?更新问题,使其只关注一个问题editingthispost.关闭8年前。Improvethisquestion我们有以下(以及更多)系统,我们将数据从一个应用推送/拉取到另一个:托管CRM(InsideSales.com)Asterisk电话系统(内部)横幅广告系统(openx,我们托管)潜在客户生成系统(自行开发)电子商务商店(spree,我们托管)工作板(本土)一些工作网站抓取+入站工作提要电子邮件传送系统(如Mailchimp,自主开发)事件管理系统(如eventbrite,自主开发)仪表板系统(大量图表和
我正在尝试找出一种方法来显示来自不在RAILS_ROOT下(在RedHat或Ubuntu环境中)的已安装文件系统的图像。我不想使用符号链接(symboliclink),因为这个应用程序实际上是通过Tomcat部署的,而当我关闭Tomcat时,Tomcat会尝试跟随符号链接(symboliclink)并删除挂载中的所有图像。由于这些文件的数量和大小,将图像放在public/images下也不是一种选择。我查看了send_file,但它只会显示一张图片。我需要在一个格式良好的页面中显示6个请求的图像。由于膨胀,我宁愿不使用Base64编码,但我不知道如何将图像数据与呈现的页面一起传递下去。