目录
本篇我们依然试着用一些浅显的数学知识,来研究和实现一下常用机器人小车(如AGV)的控制,这里的小车我们先选用二轮驱动的差速小车,即通过两个驱动轮的转速控制实现所有想要的运动。我们会首先对这类小车的运动原理进行一些分析,并通过分析得出的数学步骤,用python去实现机器人小车的正向控制算法、反向控制算法(或者轨迹跟踪),并在此基础上,去尝试实现一下固定场景下,如仓储搬运、工厂转运等的机器人小车的轨迹规划、自动泊车(通常是去充电),并将首先在vrep仿真环境验证,验证完后,可以自己搭建实物去实现。
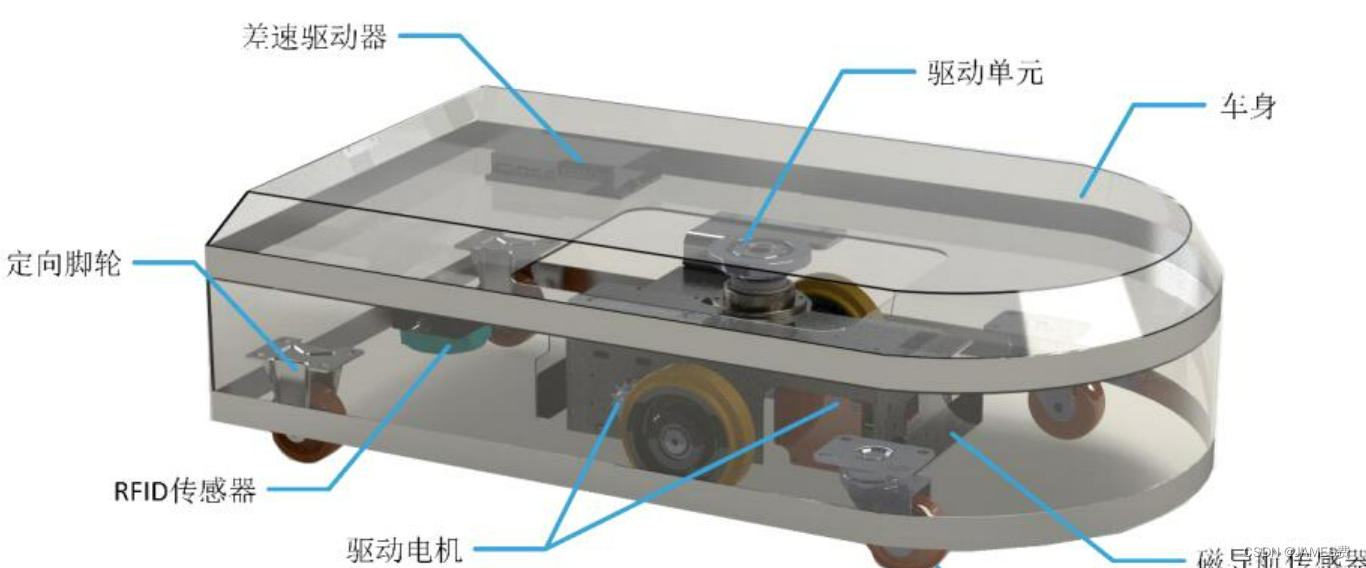
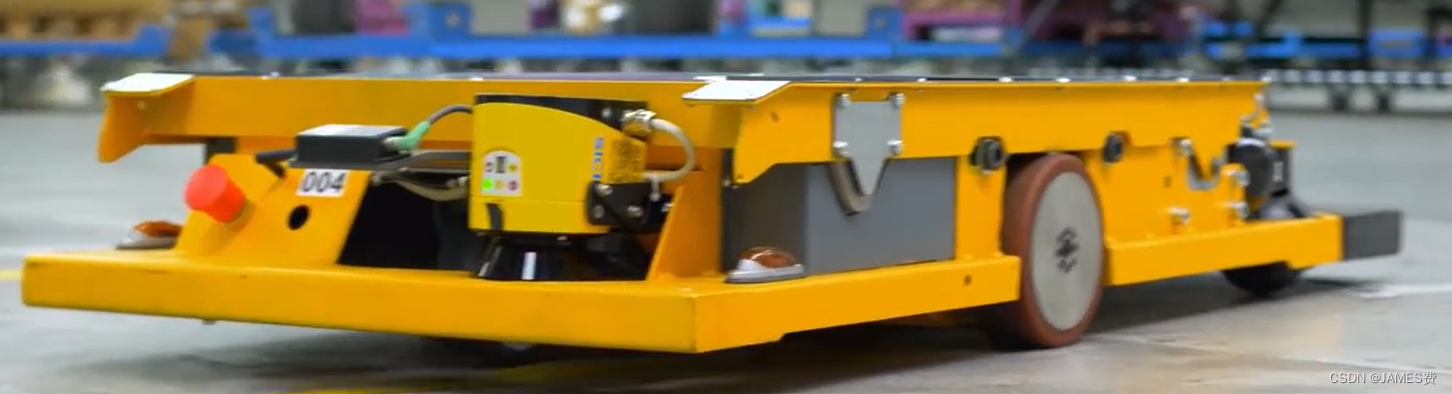
如上图,我们研究的对象直观上是这样一个车,通过两个驱动轮电机控制去实现机器人小车的所有运动,当然实际中会加装一些摄像头、雷达等传感设备。
那么这样的小车我们分析一下,主要有这样的一些状态:
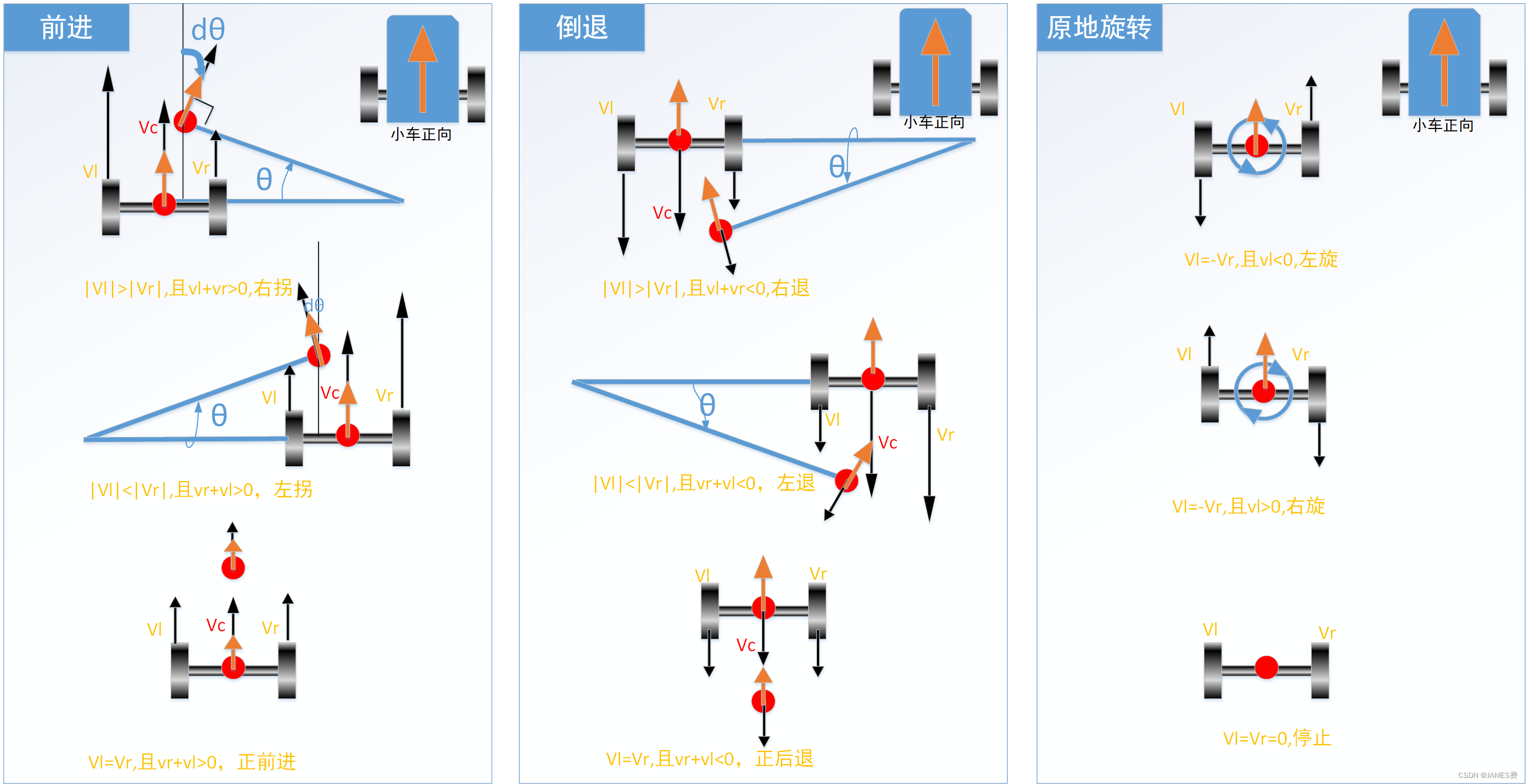
直观的看,小车可以有以上9种状态,前进(左前、右前、正前),倒退(左退,右退、正后退)、原地(左旋,右旋,停止),然后分别是通过左右轮的不同转速和旋转的方向的组合去实现这样的状态的。
其中这些状态,转向的实现是控制的重点。这里有一个前提是,假设在某个小间隔dt内,左右轮速度恒定,这样小车就在做圆周运动了。我们可以得出,当左轮和右轮产生速度差(线速度或转速)时候,小车就会转弯,当左轮的线速度值(不考虑方向)大于右轮时,小车转弯的半径、圆心在相对小车的右侧,反之,在小车的左侧,而且圆心始终在车轴的延长线上。
接下来来进一步研究:
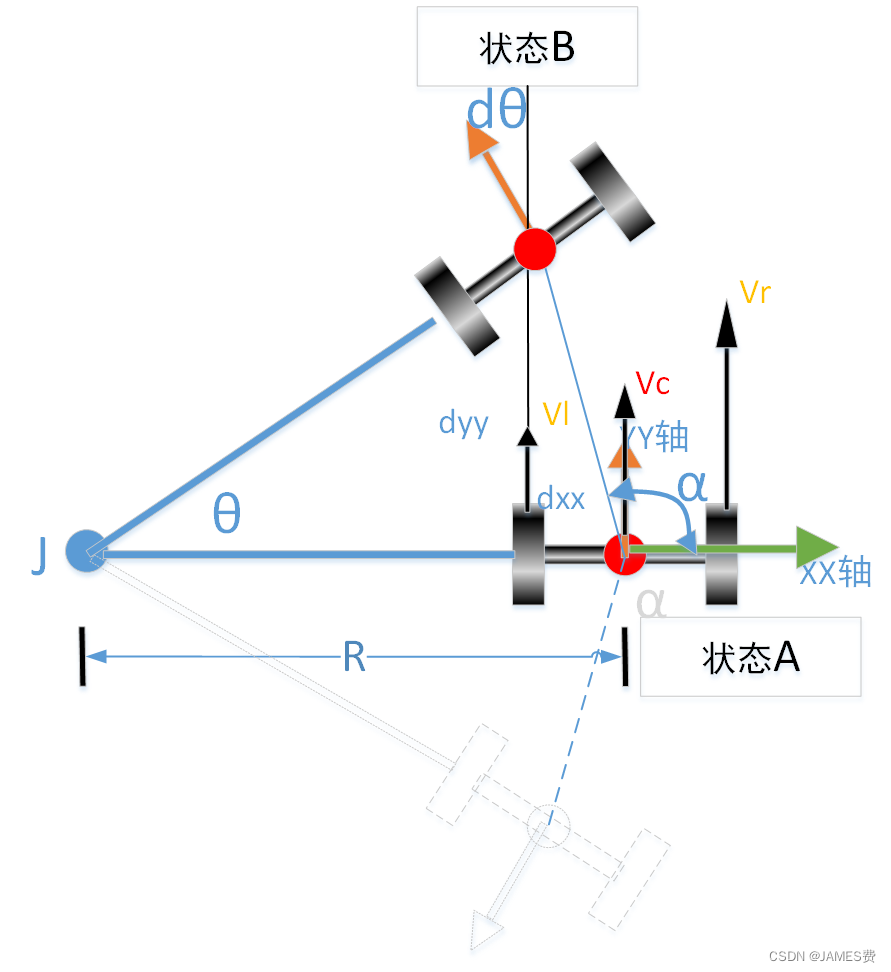
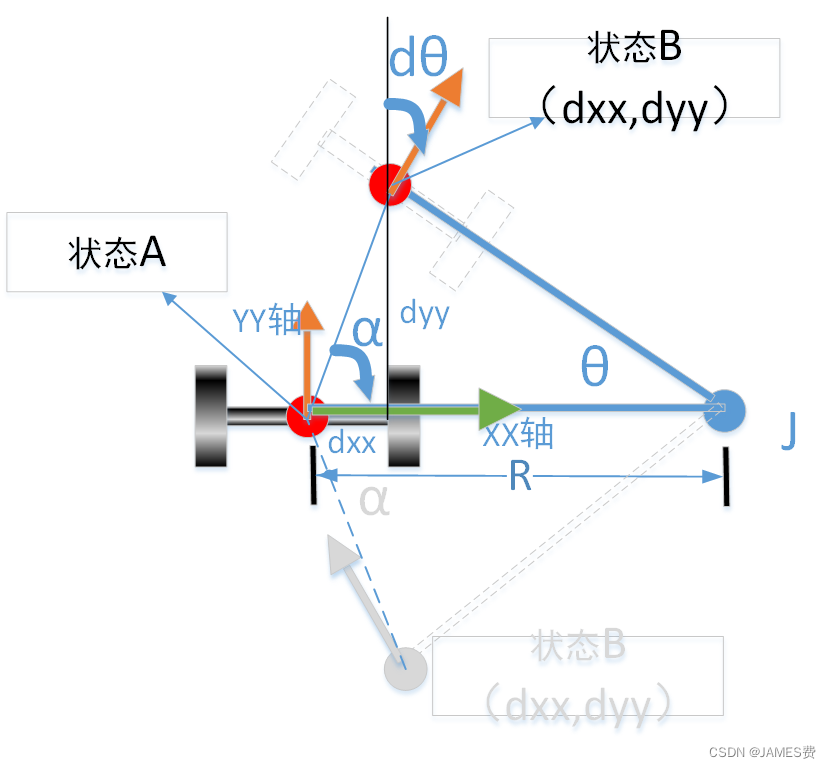
本节要解决的问题是,已知此时(t),小车的位置(x,y)和方向(小车YY轴与x轴的夹角),在某个小时间间隔(dt)内,给定两车的转速(sl、sr),在下个时刻(t+dt),小车的位置会在哪里?

如上图,首先来定义一下坐标系:我们定义大地坐标系为X-Y坐标系,用于定位小车中心的位置和方向信息,小车自身的坐标系为xx-yy坐标系,用于定位下一时刻小车的位置信息。本篇所用到的符号系统定义如下:
符号说明(不区分大小写):
Rw:轮子的半径,已知
L:轮子距离,已知
ω :车子中心的角速度,逆时针为正
Vc:车子中心的线速度,
Vl:车子左轮的线速度,
Sl: 左轮的转速,则:vl=sl2ΠRw
Vr:车子右轮的线速度,
Sr:右轮转速,则:vr=sr2ΠRw
R:t到t+dt时刻内,车子的圆周运动半径
θt:当前时刻的小车朝向,
θ(t+dt):dt后的小车朝向,
dθ:dt内的转角
α:下一时刻位置点到小车原点连线与小车xx轴的夹角
基于上面的分析,我们首先来推导一下,小车圆周运动的圆心在小车右侧的情况(如上图,条件是|Vl|>|Vr|),步骤如下:
假设t到t+dt时刻,小车的左轮速度为vl,右轮为vr,小车在以半径为R的圆周运动,当两个轮子产生速度差时,为曲线运动,两个轮子速度越接近,越趋向直线运动,左轮和右轮在车轴的延长线上J为圆心,车子的其角速度为ω ,因为两个轮子必须保持位置固定,否则就变形了:
(1)当|Vl|>|Vr|,圆运动圆心在车右边(如上图):
ω=vc/R=vl/(R+L/2)=vr/(R-L/2) 可得:
Vc=ωR
Vl=ω(R+L/2)
Vr=ω*(R-L/2) 进而可得:
Vc=(vl+vr)/2 (1)
ω=(Vl-vr)/L (2)
R=vc/ω=L/2*(vl+vr)/(Vl-vr),
dθ=ω*Dt
当vr+vl>0,即前右拐,小车方向角减小:
θ(t+dt)=θt-|dθ|
当vr+vl<0,即右退,小车方向角增大:
θ(t+dt)=θt+|dθ|
(2)当|Vl|<|Vr|,圆运动圆心在车左边(如上图),此时逆时针圆周运动为正:
ω=vc/R=vl/(R-L/2)=vr/(R+L/2) 可得:
Vc=ωR
Vl=ω(R-L/2)
Vr=ω*(R+L/2) 进而可得:
Vc=(vl+vr)/2 (1)
ω=(Vr-vl)/L (2)
R=vc/ω=L/2*(vl+vr)/(vr-vl),
dθ=ω*dt
当vr+vl>0,即前左拐,使小车方向角增大:
θ(t+dt)=θt+|dθ|
当vr+vl<0,即左退,使小车方向角减小:
θ(t+dt)=θt-|dθ|
(1)当|Vl|>|Vr|
如图所示,t+dt时刻的状态B,相对于t时刻的小车坐标系上的位置(dxx,dyy),我们可以根据三角形(ABJ)性质及坐标偏移很容易得出:
|AB|=|JA|2+|JB|2-2cos(θ)|JA||JB|=R*sqrt(2(1-cos(θ)))
当vr+vl>0,即前右拐,B状态点在第一象限:
α =(pi-θ)/2 等腰三角形可得
dxx=|AB|*cos(α)
dyy=|AB|*sin(α)
当vr+vl<0,即右退,B状态点在第四象限:
α=(θ-pi)/2
dxx=|AB|*cos(pi/2+dθ)=|AB|cos(α)
dyy=|AB|sin(pi/2+(pi-θ)/2)=|AB|sin(α)
(2)当|Vl|<|Vr|
|AB|=|JA|2+|JB|2-2cos(θ)|JA||JB|=Rsqrt(2(1-cos(θ)))
当vr+vl>0,即前右拐,B状态点在第二象限:
α =pi-(pi-θ)/2=(pi+θ)/2
dxx=|AB|*cos(α)
dyy=|AB|*sin(α)
当vr+vl<0,即右退,B状态点在第三象限:
α=-(pi+θ)/2
dxx=|AB|cos(α)
dyy=|AB|sin(α)
上一步计算得到了t+dt时刻状态B的相对坐标(dxx,dyy)
而我们目标是要求状态B的世界坐标,这里我们引入旋转和平移变换的知识:
一个坐标系上一点(x,y),经过坐标系原点逆时针旋转θ后得到的新坐标上的坐标为(x*,y*)则:
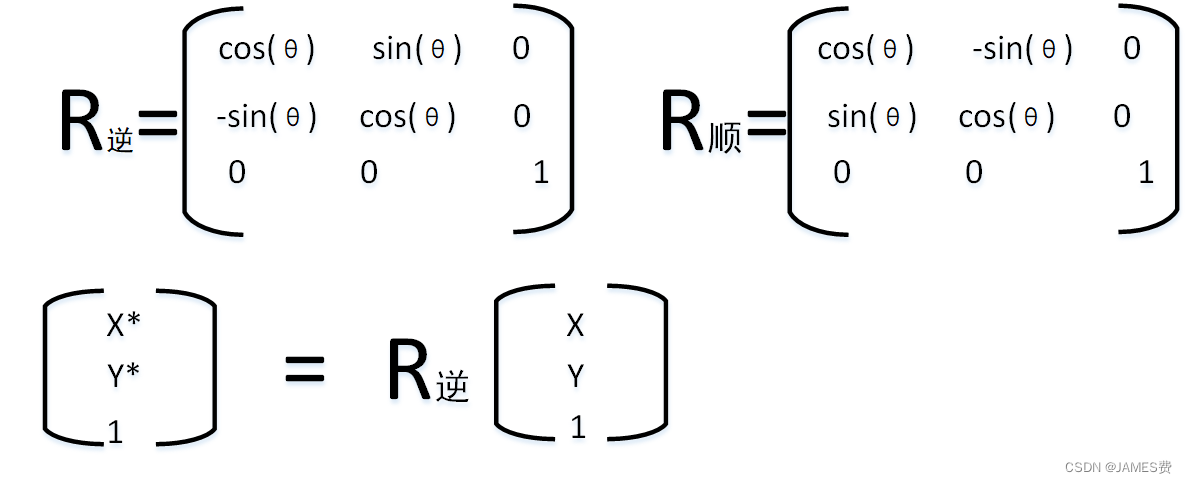
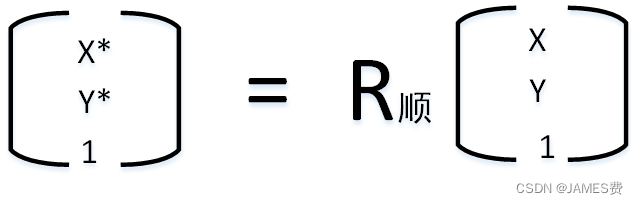
经过坐标系原点顺时针旋转θ后得到的新坐标上的坐标为(x*,y*)则:
坐标平移也有类似矩阵形式:

求解的问题,我们可以通过先旋转变化到与世界坐标系平行,然后再平移变换,就可得到B状态在世界坐标系的坐标(x_next,y_next)了:
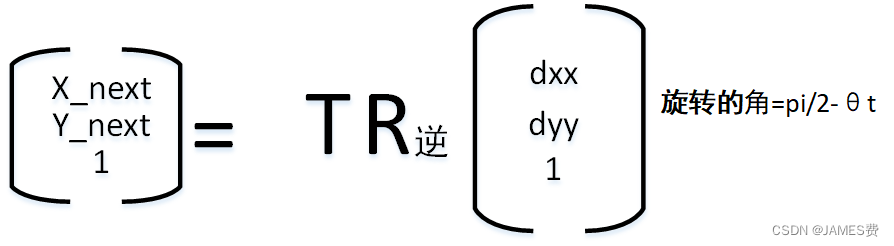
至此小车拐弯的运动正向计算模型就完成了。
此外,小车原地旋转,正向前进后退等,很容易表达,这里就不再赘述。接卸来就可以撸python代码实现了。
以下为实现小车右转向的核心代码:
def NextState(xt, yt, theta, sl, sr,l=0.5,dt=1,Rw=0.4):
"""
xt,yt: 当前小车机器人位置坐标
theta: 当前小车机器人方位角,弧度表示
vl:当前dt,左轮转速值,当为负值为反转
vr:当前dt,右轮转速值,当为负值为反转
dt:当前速度持续时间
l:两个轮子的宽度
Rw:轮子半径
return: 返回t+dt时刻的小车位置坐标、朝向
"""
#小车存在差速的情况,
vl=sl*2*math.pi*Rw
vr=sr*2*math.pi*Rw
print("左右速度:",vl,vr)
if vl!=vr:
if np.abs(vl)>np.abs(vr): #圆心在右侧情况,圆周运动
# 小车的线速度
vc=(vl+vr)/2
#小车的角速度
omiga=(vl-vr)/l
print("旋转角度:",omiga)
#小车的圆周运动半径
R=vc/omiga
print("圆半径:",R)
#小车的旋转角增量
theta_dt=omiga*dt
res,line=sovle_lineBy(R,R,theta_dt)
if res:
#小车下一时刻的方向角
if vr+vl>0:#小车右前拐,方向角变小
df=-1
alpha=(math.pi-theta_dt)/2
if vr+vl<0:#小车右后拐,方向角变大
df=1
alpha=(theta_dt-math.pi)/2
print("alpha:",alpha)
dxx=line*math.cos(alpha)
dyy=line*math.sin(alpha)
theta_next=theta+np.abs(theta_dt)*df
#平移矩阵
T=np.array([[1,0,xt],
[0,1,yt],
[0,0,1]])
#旋转矩阵
Tangle=math.pi/2-theta
R=np.array([[math.cos(Tangle),math.sin(Tangle),0],
[-math.sin(Tangle),math.cos(Tangle),0],
[0,0,1]])
XY_t=np.array([[dxx],
[dyy],
[1]])
xy_next=np.dot(T, np.dot(R,XY_t))
x_next=xy_next[0][0]
y_next=xy_next[1][0]
print(xy_next)
print("dxx,dyy",dxx,dyy)
else:
print("sovle_lineBy failure")
return False,None,None,None
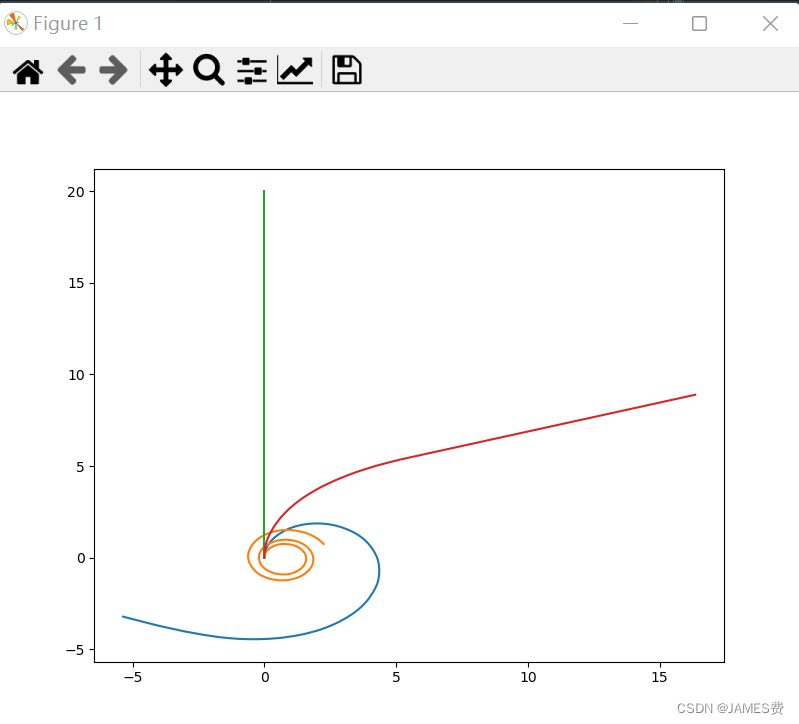
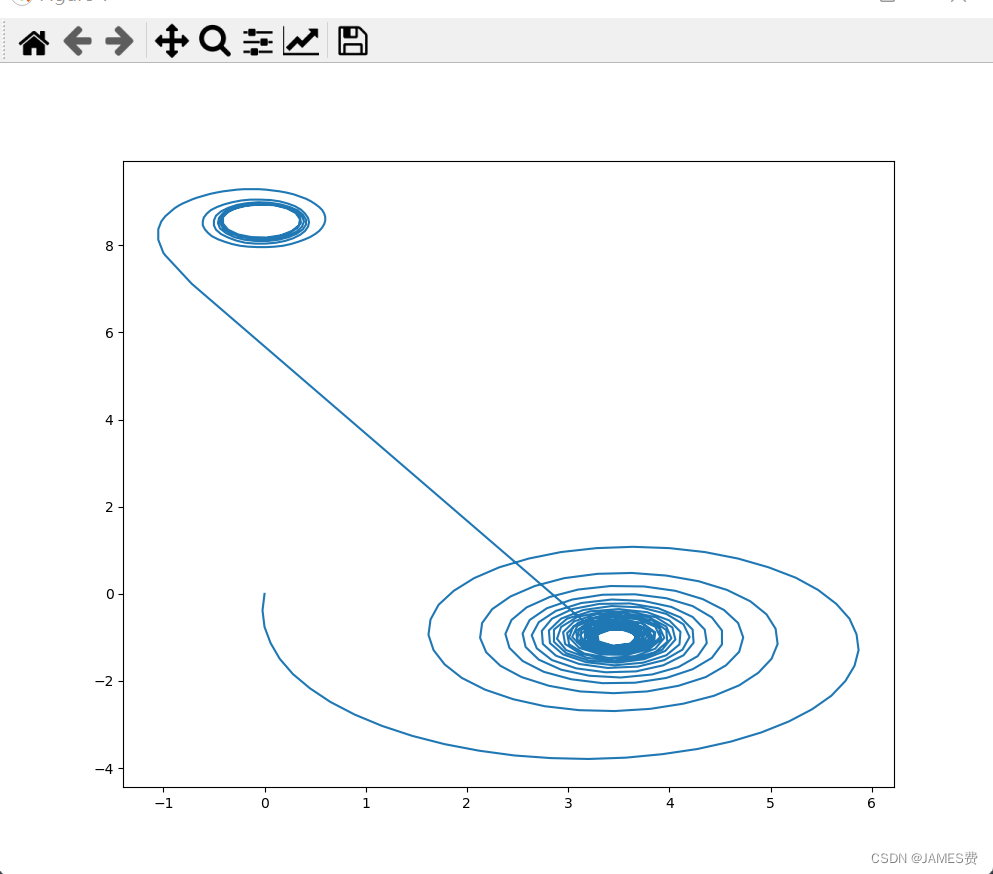
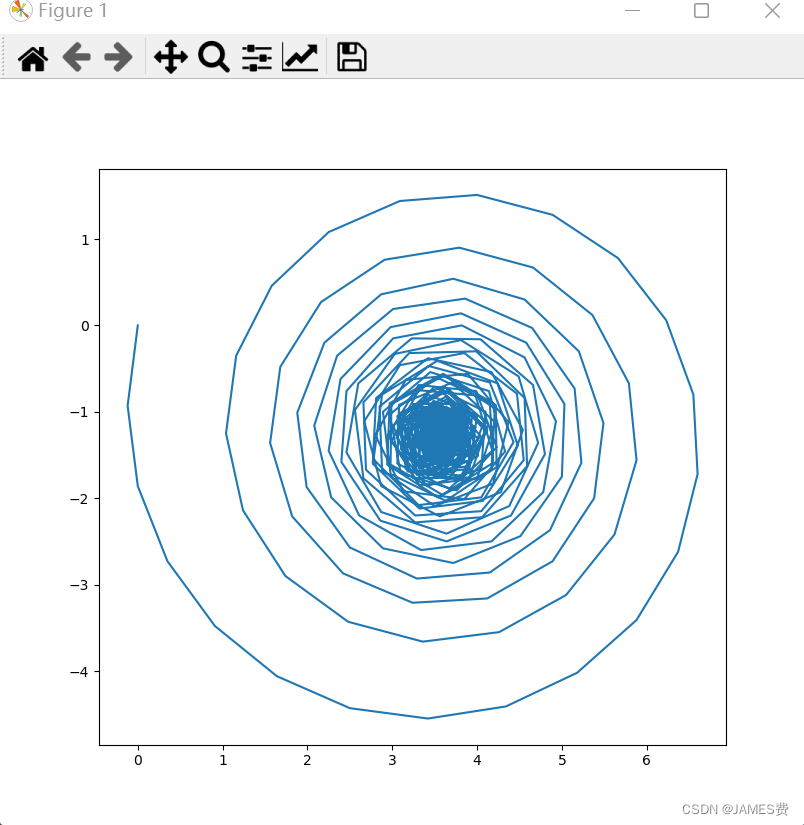
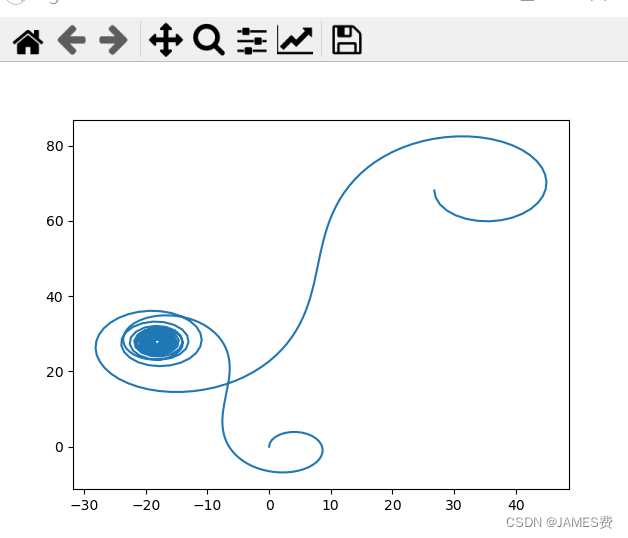
发现,改变左右轮速度,可以玩出无限花样的运动轨迹:
本节完整源码已经上传点击链接
本篇就到此了,接下来我们来研究以下这个小车的逆向控制,叫它指那到哪。
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
当我在Rails控制台中按向上或向左箭头时,出现此错误:irb(main):001:0>/Users/me/.rvm/gems/ruby-2.0.0-p247/gems/rb-readline-0.4.2/lib/rbreadline.rb:4269:in`blockin_rl_dispatch_subseq':invalidbytesequenceinUTF-8(ArgumentError)我使用rvm来管理我的ruby安装。我正在使用=>ruby-2.0.0-p247[x86_64]我使用bundle来管理我的gem,并且我有rb-readline(0.4.2)(人们推荐的最少
我正在使用Ruby2.1.1和Rails4.1.0.rc1。当执行railsc时,它被锁定了。使用Ctrl-C停止,我得到以下错误日志:~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.2/lib/spring/client/run.rb:47:in`gets':Interruptfrom~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.2/lib/spring/client/run.rb:47:in`verify_server_version'from~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.
我将我的Rails应用程序部署到OpenShift,它运行良好,但我无法在生产服务器上运行“Rails控制台”。它给了我这个错误。我该如何解决这个问题?我尝试更新rubygems,但它也给出了权限被拒绝的错误,我也无法做到。railsc错误:Warning:You'reusingRubygems1.8.24withSpring.UpgradetoatleastRubygems2.1.0andrun`gempristine--all`forbetterstartupperformance./opt/rh/ruby193/root/usr/share/rubygems/rubygems
几个月前,我读了一篇关于rubygem的博客文章,它可以通过阅读代码本身来确定编程语言。对于我的生活,我不记得博客或gem的名称。谷歌搜索“ruby编程语言猜测”及其变体也无济于事。有人碰巧知道相关gem的名称吗? 最佳答案 是这个吗:http://github.com/chrislo/sourceclassifier/tree/master 关于ruby-寻找通过阅读代码确定编程语言的rubygem?,我们在StackOverflow上找到一个类似的问题:
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
这个问题在这里已经有了答案:关闭10年前。PossibleDuplicate:Pythonconditionalassignmentoperator对于这样一个简单的问题表示歉意,但是谷歌搜索||=并不是很有帮助;)Python中是否有与Ruby和Perl中的||=语句等效的语句?例如:foo="hey"foo||="what"#assignfooifit'sundefined#fooisstill"hey"bar||="yeah"#baris"yeah"另外,类似这样的东西的通用术语是什么?条件分配是我的第一个猜测,但Wikipediapage跟我想的不太一样。
什么是ruby的rack或python的Java的wsgi?还有一个路由库。 最佳答案 来自Python标准PEP333:Bycontrast,althoughJavahasjustasmanywebapplicationframeworksavailable,Java's"servlet"APImakesitpossibleforapplicationswrittenwithanyJavawebapplicationframeworktoruninanywebserverthatsupportstheservletAPI.ht
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
我想解析一个已经存在的.mid文件,改变它的乐器,例如从“acousticgrandpiano”到“violin”,然后将它保存回去或作为另一个.mid文件。根据我在文档中看到的内容,该乐器通过program_change或patch_change指令进行了更改,但我找不到任何在已经存在的MIDI文件中执行此操作的库.他们似乎都只支持从头开始创建的MIDI文件。 最佳答案 MIDIpackage会为您完成此操作,但具体方法取决于midi文件的原始内容。一个MIDI文件由一个或多个音轨组成,每个音轨是十六个channel中任何一个上的