相机标定笔记
之前只是停留在会用的阶段,一直没去读懂计算的原理,今天通读了大佬的文章,写的言简意赅,感谢感谢~~特此记录一下,仅用作个人笔记
贴链接,十分感谢~
https://blog.csdn.net/weixin_44278406/article/details/112986651
https://blog.csdn.net/guyuealian/article/details/104184551
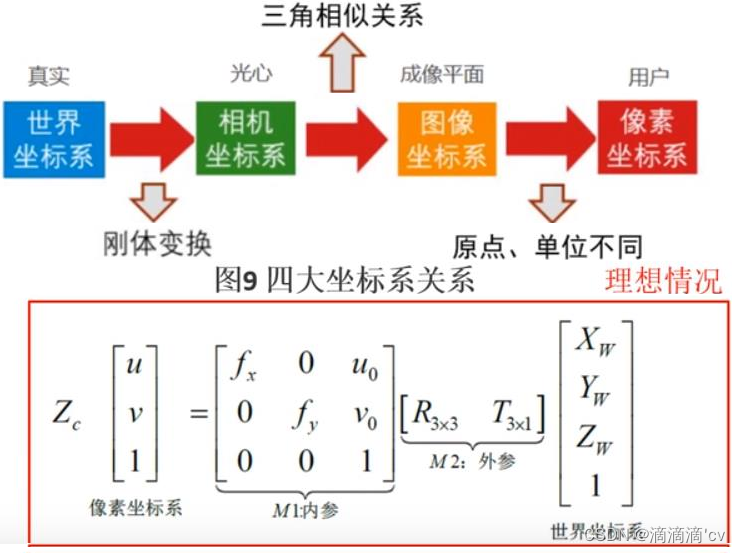
将三维物体转换成照片上的二维坐标,由四个坐标系进行转换。
世界坐标系是一个特殊坐标系,它建立了描述其他坐标系需要的参考框架。能够用世界坐标系描述其他坐标系的位置,而不能用更大的、外部的坐标系描述世界坐标系。从非技术意义上讲,世界坐标系建立的是我们所关心的最大坐标系,而不必真的是整个世界。
用
(
X
w
,
Y
w
,
Z
w
)
(X_w,Y_w,Z_w)
(Xw,Yw,Zw)来表示,世界坐标系可通过旋转和平移得到相机坐标系。
以相机透镜的几何中心(光心)为原点,坐标系满足右手法则,用 ( X c , Y c , Z c ) (X_c,Y_c,Z_c) (Xc,Yc,Zc)来表示;相机光轴为坐标系的Z轴,X轴水平,Y轴竖直。
以CCD图像的中心为原点,坐标由
(
x
,
y
)
(x, y)
(x,y) 表示,图像坐标系的单位,一般是毫米,坐标原点为相机光轴与成像平面的交点(一般情况下,这个交点是接近于图像的正中心)

CCD,英文全称:Charge coupled Device,中文全称:电荷耦合元件,可以称为CCD图像传感器。CCD是一种半导体器件,能够把光学影像转化为数字信号。 CCD上植入的微小光敏物质称作像素(Pixel)。一块CCD上包含的像素数越多,其提供的画面分辨率也就越高。
其实,当我们提及一个图像时,通常指的是图像的像素坐标系。像素坐标系的原点在左上角,并且单位为像素。

将图像坐标系的原点 O 1 O_1 O1 ,转化到以 O 0 O_0 O0 为原点的坐标系中。使用的原因:
针孔模型(The basic pinhole model)。这种模型在数学上是三维空间到二维平面(image plane or focal plane)的中心投影,由一个 3 × 4 3 × 4 3×4 投影矩阵 P = K [ R ∣ t ] P = K [ R | t ] P=K[R∣t]来描述, K K K 为相机内参(internal camera parameters), [ R ∣ t ] [R|t] [R∣t]为外参(external parameters)。
[
X
c
Y
c
Z
c
1
]
=
[
R
t
0
1
∗
3
1
]
[
X
w
Y
w
Z
w
1
]
\begin{bmatrix}X_c \\ Y_c \\ Z_c \\ 1 \end{bmatrix} = \begin{bmatrix}R & t\\\\ 0_{1*3} & 1 \end{bmatrix} \begin{bmatrix}X_w \\ Y_w \\ Z_w \\ 1 \end{bmatrix}
⎣
⎡XcYcZc1⎦
⎤=⎣
⎡R01∗3t1⎦
⎤⎣
⎡XwYwZw1⎦
⎤
X
c
,
Y
c
,
Z
c
X_c,Y_c,Z_c
Xc,Yc,Zc代表相机坐标;
X
w
,
Y
w
,
Z
w
X_w,Y_w,Z_w
Xw,Yw,Zw代表世界坐标;R代表正交单位旋转矩阵,t代表三维平移矢量。
根据旋转角度可以分别得三个方向上的旋转矩阵,而旋转矩阵即为他们的乘积:
R
=
R
x
∗
R
y
∗
R
z
R = R_x * R_y * R_z
R=Rx∗Ry∗Rz
顺便记录一下三个旋转矩阵的公式,经常忘记。
[ X c Y c Z c ] = [ 1 0 0 0 c o s θ s i n θ 0 − s i n θ c o s θ ] [ X w Y w Z w ] = R x [ X w Y w Z w ] \begin{bmatrix}X_c\\Y_c\\Z_c\end{bmatrix} = \begin{bmatrix}1&0&0\\0&cos\theta&sin\theta\\0&-sin\theta&cos\theta\end{bmatrix} \begin{bmatrix}X_w\\Y_w\\Z_w\end{bmatrix}=R_x\begin{bmatrix}X_w\\Y_w\\Z_w\end{bmatrix} ⎣ ⎡XcYcZc⎦ ⎤=⎣ ⎡1000cosθ−sinθ0sinθcosθ⎦ ⎤⎣ ⎡XwYwZw⎦ ⎤=Rx⎣ ⎡XwYwZw⎦ ⎤
[ X c Y c Z c ] = [ c o s θ 0 − s i n θ 0 1 0 s i n θ 0 c o s θ ] [ X w Y w Z w ] = R y [ X w Y w Z w ] \begin{bmatrix}X_c\\Y_c\\Z_c\end{bmatrix} = \begin{bmatrix}cos\theta&0&-sin\theta\\0&1&0\\sin\theta&0&cos\theta\end{bmatrix} \begin{bmatrix}X_w\\Y_w\\Z_w\end{bmatrix}=R_y\begin{bmatrix}X_w\\Y_w\\Z_w\end{bmatrix} ⎣ ⎡XcYcZc⎦ ⎤=⎣ ⎡cosθ0sinθ010−sinθ0cosθ⎦ ⎤⎣ ⎡XwYwZw⎦ ⎤=Ry⎣ ⎡XwYwZw⎦ ⎤
[ X c Y c Z c ] = [ c o s θ s i n θ 0 − s i n θ c o s θ 0 0 0 1 ] [ X w Y w Z w ] = R z [ X w Y w Z w ] \begin{bmatrix}X_c\\Y_c\\Z_c\end{bmatrix} = \begin{bmatrix}cos\theta&sin\theta&0\\-sin\theta&cos\theta&0\\0&0&1\end{bmatrix} \begin{bmatrix}X_w\\Y_w\\Z_w\end{bmatrix}=R_z\begin{bmatrix}X_w\\Y_w\\Z_w\end{bmatrix} ⎣ ⎡XcYcZc⎦ ⎤=⎣ ⎡cosθ−sinθ0sinθcosθ0001⎦ ⎤⎣ ⎡XwYwZw⎦ ⎤=Rz⎣ ⎡XwYwZw⎦ ⎤
相机坐标系到图像坐标系是透视关系,利用相似三角形进行计算。
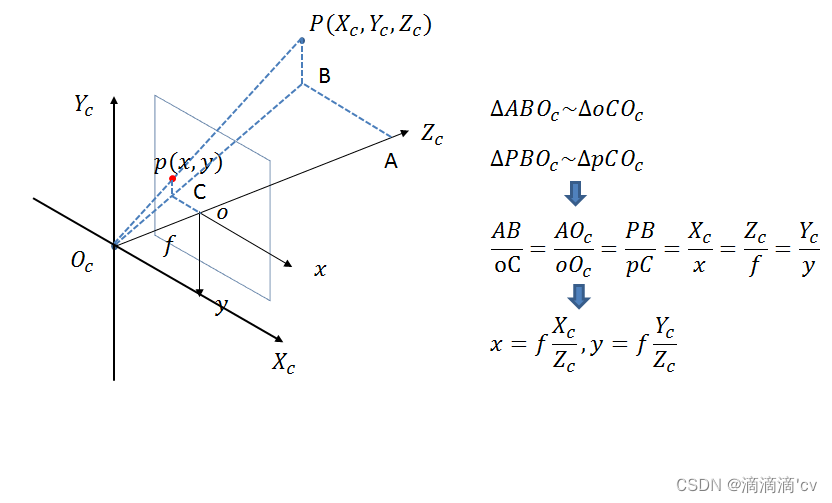
写成齐次坐标形式的矩阵相乘为
Z
c
[
x
y
1
]
=
[
f
0
0
0
0
f
0
0
0
0
1
0
]
[
X
c
Y
c
Z
c
1
]
=
[
K
∣
0
]
[
X
c
Y
c
Z
c
1
]
Zc \begin{bmatrix}x\\y\\1\end{bmatrix} = \begin{bmatrix}f&0&0&0\\0&f&0&0\\0&0&1&0 \end{bmatrix} \begin{bmatrix}X_c\\Y_c\\Z_c\\1\end{bmatrix} = \begin{bmatrix}K|0\end{bmatrix} \begin{bmatrix}X_c\\Y_c\\Z_c\\1\end{bmatrix}
Zc⎣
⎡xy1⎦
⎤=⎣
⎡f000f0001000⎦
⎤⎣
⎡XcYcZc1⎦
⎤=[K∣0]⎣
⎡XcYcZc1⎦
⎤
其中f代表焦距,即相机坐标系和图像坐标系在Z轴上的差。此时投影点p的单位还是mm,并不是pixel,不方便进行后续运算。
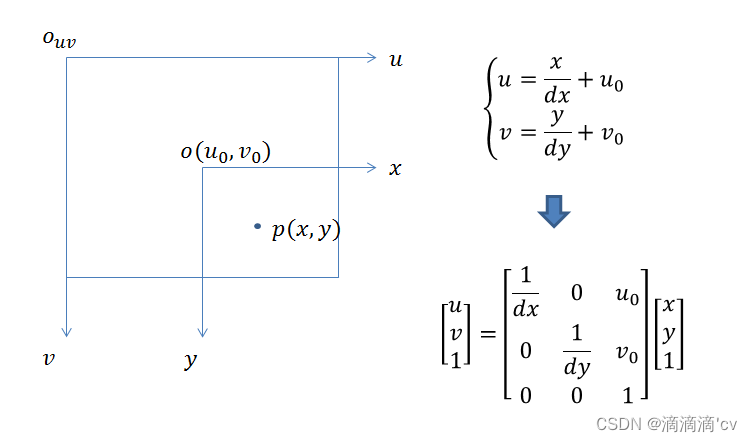
像素坐标系的原点在左上角,并且单位为像素。像素坐标系和图像坐标系都在成像平面上,只是各自的原点和度量单位不一样。图像坐标系的原点为相机光轴与成像平面的交点,通常情况下是成像平面的中点或者叫principal point。图像坐标系的单位是mm,属于物理单位,而像素坐标系的单位是pixel,我们平常描述一个像素点都是几行几列。所以这二者之间的转换如下:其中dx和dy表示每一列和每一行分别代表多少mm,即1pixel=dx mm
Z
c
[
u
v
1
]
=
[
1
d
x
0
u
0
0
1
d
y
v
0
0
0
1
]
[
f
0
0
0
0
f
0
0
0
0
1
0
]
[
R
t
0
1
∗
3
1
]
[
X
w
Y
w
Z
w
1
]
Zc \begin{bmatrix}u\\v\\1\end{bmatrix} = \begin{bmatrix}\frac{1}{d_x}&0&u_0\\0&\frac{1}{d_y}&v_0\\0&0&1 \end{bmatrix} \begin{bmatrix}f&0&0&0\\0&f&0&0\\0&0&1&0 \end{bmatrix} \begin{bmatrix}R & t\\\\ 0_{1*3} & 1 \end{bmatrix} \begin{bmatrix}X_w \\ Y_w \\ Z_w \\ 1 \end{bmatrix}
Zc⎣
⎡uv1⎦
⎤=⎣
⎡dx1000dy10u0v01⎦
⎤⎣
⎡f000f0001000⎦
⎤⎣
⎡R01∗3t1⎦
⎤⎣
⎡XwYwZw1⎦
⎤
其中
[
1
d
x
0
u
0
0
1
d
y
v
0
0
0
1
]
[
f
0
0
0
0
f
0
0
0
0
1
0
]
\begin{bmatrix}\frac{1}{d_x}&0&u_0\\0&\frac{1}{d_y}&v_0\\0&0&1 \end{bmatrix} \begin{bmatrix}f&0&0&0\\0&f&0&0\\0&0&1&0 \end{bmatrix}
⎣
⎡dx1000dy10u0v01⎦
⎤⎣
⎡f000f0001000⎦
⎤为相机内参矩阵,
[
R
t
0
1
∗
3
1
]
\begin{bmatrix}R & t\\\\ 0_{1*3} & 1 \end{bmatrix}
⎣
⎡R01∗3t1⎦
⎤为外参矩阵。相机标定就是为了求解这两个矩阵的参数。
我的目标是转换表单输入,例如“100兆字节”或“1GB”,并将其转换为我可以存储在数据库中的文件大小(以千字节为单位)。目前,我有这个:defquota_convert@regex=/([0-9]+)(.*)s/@sizes=%w{kilobytemegabytegigabyte}m=self.quota.match(@regex)if@sizes.include?m[2]eval("self.quota=#{m[1]}.#{m[2]}")endend这有效,但前提是输入是倍数(“gigabytes”,而不是“gigabyte”)并且由于使用了eval看起来疯狂不安全。所以,功能正常,
我想将html转换为纯文本。不过,我不想只删除标签,我想智能地保留尽可能多的格式。为插入换行符标签,检测段落并格式化它们等。输入非常简单,通常是格式良好的html(不是整个文档,只是一堆内容,通常没有anchor或图像)。我可以将几个正则表达式放在一起,让我达到80%,但我认为可能有一些现有的解决方案更智能。 最佳答案 首先,不要尝试为此使用正则表达式。很有可能你会想出一个脆弱/脆弱的解决方案,它会随着HTML的变化而崩溃,或者很难管理和维护。您可以使用Nokogiri快速解析HTML并提取文本:require'nokogiri'h
我需要读入一个包含数字列表的文件。此代码读取文件并将其放入二维数组中。现在我需要获取数组中所有数字的平均值,但我需要将数组的内容更改为int。有什么想法可以将to_i方法放在哪里吗?ClassTerraindefinitializefile_name@input=IO.readlines(file_name)#readinfile@size=@input[0].to_i@land=[@size]x=1whilex 最佳答案 只需将数组映射为整数:@land边注如果你想得到一条线的平均值,你可以这样做:values=@input[x]
这道题是thisquestion的逆题.给定一个散列,每个键都有一个数组,例如{[:a,:b,:c]=>1,[:a,:b,:d]=>2,[:a,:e]=>3,[:f]=>4,}将其转换为嵌套哈希的最佳方法是什么{:a=>{:b=>{:c=>1,:d=>2},:e=>3,},:f=>4,} 最佳答案 这是一个迭代的解决方案,递归的解决方案留给读者作为练习:defconvert(h={})ret={}h.eachdo|k,v|node=retk[0..-2].each{|x|node[x]||={};node=node[x]}node[
我正在使用Rails构建一个简单的聊天应用程序。当用户输入url时,我希望将其输出为html链接(即“url”)。我想知道在Ruby中是否有任何库或众所周知的方法可以做到这一点。如果没有,我有一些不错的正则表达式示例代码可以使用... 最佳答案 查看auto_linkRails提供的辅助方法。这会将所有URL和电子邮件地址变成可点击的链接(htmlanchor标记)。这是文档中的代码示例。auto_link("Gotohttp://www.rubyonrails.organdsayhellotodavid@loudthinking.
我有带有Logo图像的公司模型has_attached_file:logo我用他们的Logo创建了许多公司。现在,我需要添加新样式has_attached_file:logo,:styles=>{:small=>"30x15>",:medium=>"155x85>"}我是否应该重新上传所有旧数据以重新生成新样式?我不这么认为……或者有什么rake任务可以重新生成样式吗? 最佳答案 参见Thumbnail-Generation.如果rake任务不适合你,你应该能够在控制台中使用一个片段来调用重新处理!关于相关公司
我收到格式为的回复#我需要将其转换为哈希值(针对活跃商家)。目前我正在遍历变量并执行此操作:response.instance_variables.eachdo|r|my_hash.merge!(r.to_s.delete("@").intern=>response.instance_eval(r.to_s.delete("@")))end这有效,它将生成{:first="charlie",:last=>"kelly"},但它似乎有点hacky和不稳定。有更好的方法吗?编辑:我刚刚意识到我可以使用instance_variable_get作为该等式的第二部分,但这仍然是主要问题。
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
我正在尝试使用Ruby2.0.0和Rails4.0.0提供的API从imgur中提取图像。我已尝试按照Ruby2.0.0文档中列出的各种方式构建http请求,但均无济于事。代码如下:require'net/http'require'net/https'defimgurheaders={"Authorization"=>"Client-ID"+my_client_id}path="/3/gallery/image/#{img_id}.json"uri=URI("https://api.imgur.com"+path)request,data=Net::HTTP::Get.new(path
2022/8/4更新支持加入水印水印必须包含透明图像,并且水印图像大小要等于原图像的大小pythonconvert_image_to_video.py-f30-mwatermark.pngim_dirout.mkv2022/6/21更新让命令行参数更加易用新的命令行使用方法pythonconvert_image_to_video.py-f30im_dirout.mkvFFMPEG命令行转换一组JPG图像到视频时,是将这组图像视为MJPG流。我需要转换一组PNG图像到视频,FFMPEG就不认了。pyav内置了ffmpeg库,不需要系统带有ffmpeg工具因此我使用ffmpeg的python包装p