前两节中所介绍的门级电路都是没有延迟的,实际门级电路都是有延迟的。
Verilog 中允许用户使用门延迟,来定义输入到其输出信号的传输延迟。
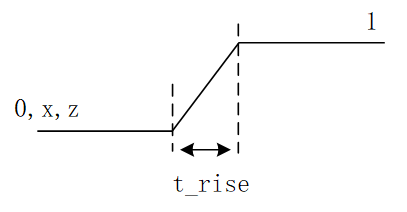
门延迟类型主要有以下 3 种。
在门的输入发生变化时,门的输出从 0,x,z 变化为 1 所需要的转变时间,称为上升延迟。
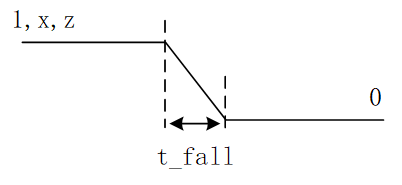
在门的输入发生变化时,门的输出从 1,x,z 变化为 0 所需要的转变时间,称为下降延迟。
关断延迟是指门的输出从 0,1,x 变化为高阻态 z 所需要的转变时间。
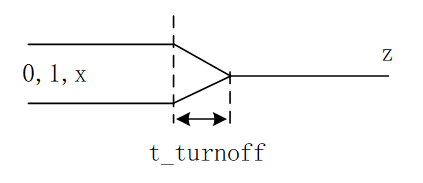
门输出从 0,1,z 变化到 x 所需要的转变时间并没有被明确的定义,但是它所需要的时间可以由其他延迟类型确定,即为以上 3 种延迟值中最小的那个延迟。
门延迟可以在门单元例化时定义,定义格式如下:
gate_type [delay] [instance_name] (signal_list) ;
其中,delay 的个数可以为 0 个、1 个、2 个或 3个 。
下表为不同延迟个数时,各种类型延迟的取值情况说明。
| 延迟类型 | 无延迟 | 1 个延迟 (d) | 2 个延迟 (d1, d2) | 3 个延迟 (d1, d2, d3) |
|---|---|---|---|---|
| 上升 | 0 | d | d1 | d1 |
| 下降 | 0 | d | d2 | d2 |
| 关断 | 0 | d | min(d1, d2) | d3 |
| to_x | 0 | d | min(d1, d2) | min(d1, d2, d3) |
如果用户没有指定延迟值,则默认延迟为 0 。
如果用户指定了 1 个延迟值,则所有类型的延迟值大小均为此值。
如果用户指定了 2 个延迟值,则他们分别代表上升延迟和下降延迟,关断和"to_x"延迟均为这 2 种延迟值中最小的那个。
如果用户指定了 3 个延迟值,则他们分别代表上升延迟、下降延迟和关断延迟,"to_x"延迟为这 3 种延迟值中最小的那个。
带有延迟值的门级单元例化如下:
//rise, fall and turn-off delay are all 1
and #(1) (OUT1, IN1, IN2) ;
//rise delay = 2.1, fall dalay = 2, trun-off delay = 2
or #(2.1, 2) (OUT2, IN1, IN2) ;
//rise delay = 2, fall dalay = 1, trun-off delay = 1.3
bufif0 #(2, 1, 1.3) (OUT3, IN1, CTRL) ;
需要说明的是,多输入门(如与门)和多输出门(如非门)最多只能定义 2 个延迟,因为输出不会是 z 。
三态门和单向开关单路(MOS 管、CMOS 管等)可以定义 3 个延迟。
上下拉门级电路不会有任何的延迟,因为它表示的是一种硬件属性,上下拉状态不会发生变化,且没有输出值。
双向开关(tran)在传输信号时没有延迟,不允许添加延迟定义。
带有控制端的双向开关(tranif1, tranif0)在开关切换的时候,会有开或关的延迟,可以给此类双向开关指定 0 个、1 个或 2 个的延迟,例如:
//turn-on and turn-off delay are all 1
tranif0 #(1) (inout1, inout2, CTRL);
//turn-on delay = 1, turn-off delay = 1.2
tranif1 #(1, 1.2) (inout3, inout4, CTRL);
由于集成电路制造工艺的差异,实际电路中器件的延迟总会在一定范围内波动。Verilog 中,用户不仅可以指定 3 种类型的门延迟,还可以对每种类型的门延迟指定其最小值、典型值和最大值。在编译或仿真阶段,来选择使用哪一种延迟值,为更切实际的仿真提供了支持。
下面通过例化实例,来说明最小、典型、最大延迟的用法。
//所有的延迟类型: 最小延迟 1, 典型延迟 2, 最大延迟 3
and #(1:2:3) (OUT1, IN1, IN2) ;
//上升延迟:最小延迟 1, 典型延迟 2, 最大延迟 3
//下降延迟:最小延迟 3, 典型延迟 4, 最大延迟 5
//关断延迟:最小延迟 min(1,3), 典型延迟 min(2,4), 最大延迟 min(3,5)
or #(1:2:3, 3:4:5) (OUT2, IN1, IN2) ;
//上升延迟:最小延迟 1, 典型延迟 2, 最大延迟 3
//下降延迟:最小延迟 3, 典型延迟 4, 最大延迟 5
//关断延迟:最小延迟 2, 典型延迟 3, 最大延迟 4
bufif0 #(1:2:3, 3:4:5, 2:3:4) (OUT3, IN1, CTRL) ;
下面从门级建模的角度,对 D 触发器进行设计。
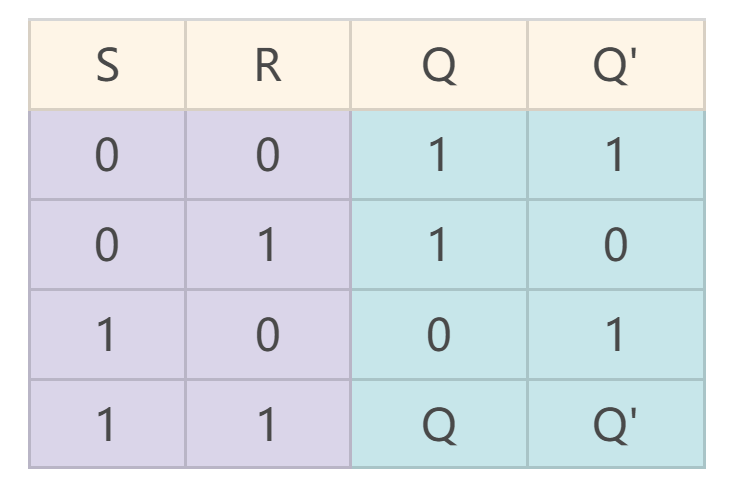
SR 触发器结构图及真值表如下所示。
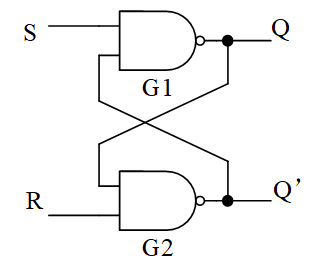
在基本的 SR 触发器前面增加 2 个与非门,可构成带有控制端 SR 锁存器。
SR 锁存器及其真值表如下所示。
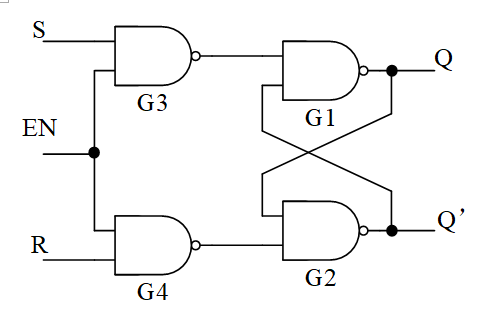
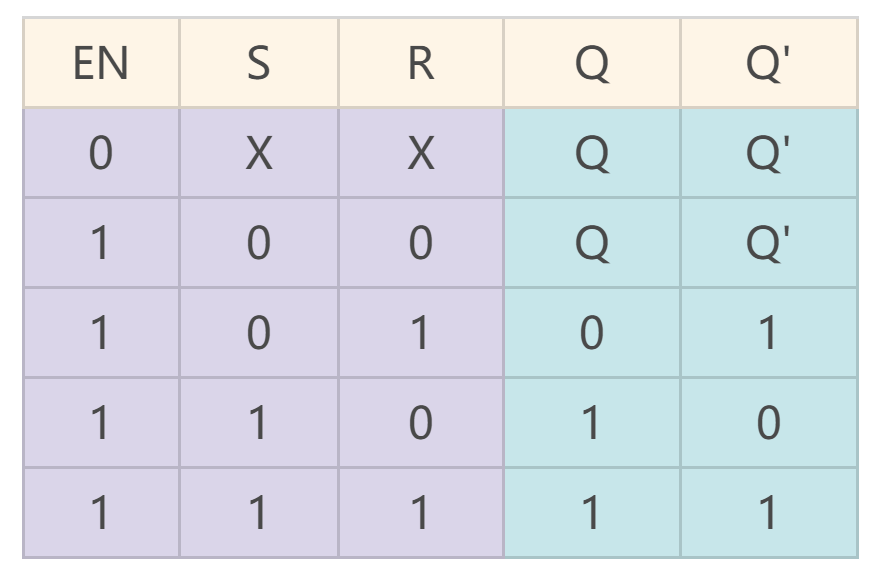
基本的 SR 触发器输入端不能同时为 0, 带有控制端的 SR 锁存器输入端不能同时为 1,否则会导致输出端 Q 与 Q' 的非互补性矛盾。
为消除此种不允许的状态,在带有控制端的 SR 锁存器结构中加入取反模块,保证 2 个输入端均为相反逻辑,则形成了 D 锁存器。
其结构图和真值表如下所示。
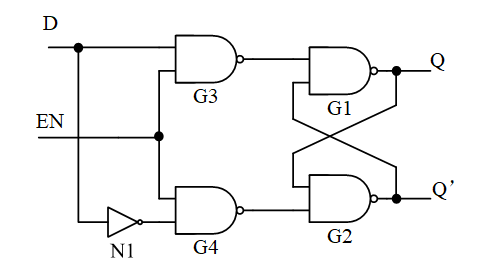
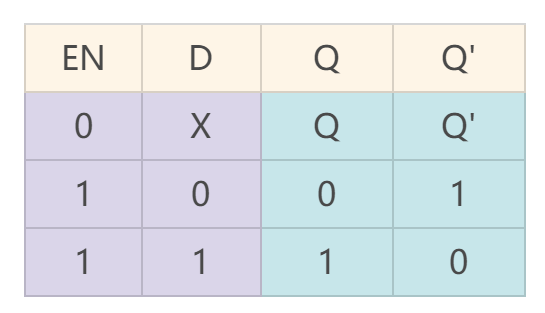
D 锁存器是一种电平触发。
如果在 EN=1 的有效时间内,D 端信号发生多次翻转,则输出端 Q 也会发生多次翻转。这降低了电路的抗干扰能力,不是实际所需求的安全电路。
为提高触发器的可靠性,增强电路抗干扰能力,发明了在特定时刻锁存信号的 D 触发器。
将两个 D 锁存器进行级联,时钟取反,便构成了一种简单的 D 触发器,又名 Flip-flop。
其结构图和真值表如下所示。
第一级 D 锁存器又称为主锁存器,在 CP 为低电平时锁存。第二级 D 锁存器又称为从锁存器,时钟较主锁存器相反,在 CP 为高电平时锁存。
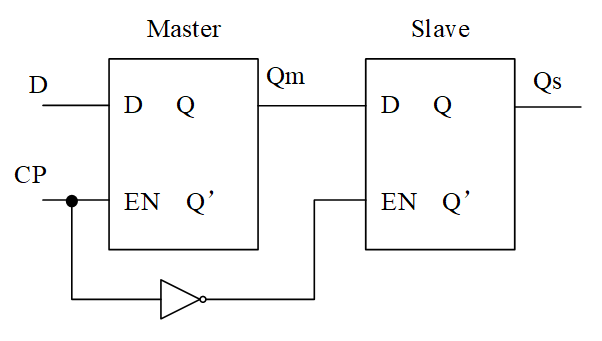
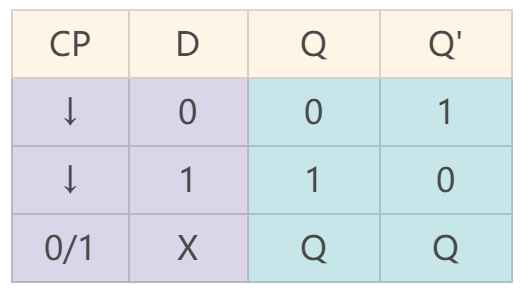
综上所述,D 触发器输出端 Qs 只会在时钟 CP 下降沿对 D 端进行信号的锁存,其余时间输出端信号具有保持的功能。
将双级 D 锁存器展开为门级结构,如下图所示。
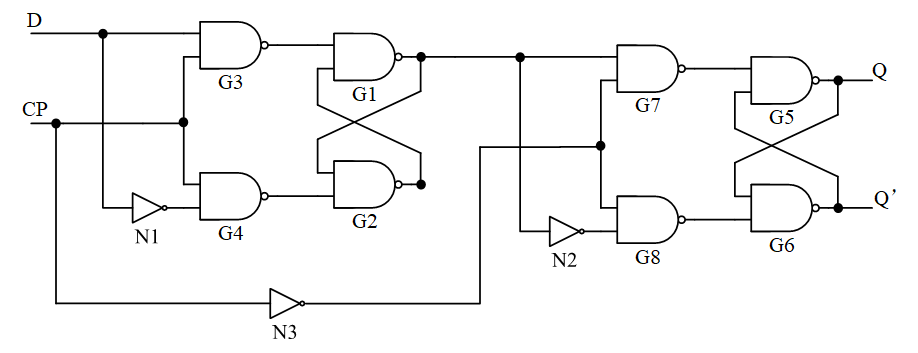
对 D 触发进行门级建模,并加入门级延时,verilog 模型如下:
module D_TRI(
input D, CP,
output Q, QR);
parameter RISE_TIME = 0.11 ;
parameter FALL_TIME = 0.07 ;
//part1, not gate
wire CPN, DN ;
not #(RISE_TIME, FALL_TIME) (CPN, CP);
not #(RISE_TIME, FALL_TIME) (DN, D);
//part2, master trigger
wire G3O, G4O ;
nand #(RISE_TIME, FALL_TIME) (G3O, D, CP);
nand #(RISE_TIME, FALL_TIME) (G4O, DN, CP);
wire #(RISE_TIME, FALL_TIME) G1O, G2O ;
nand #(RISE_TIME, FALL_TIME) (G1O, G3O, G2O);
nand #(RISE_TIME, FALL_TIME) (G2O, G4O, G1O);
//part3, slave trigger
wire G7O, G8O ;
nand #(RISE_TIME, FALL_TIME) (G7O, G1O, CPN);
nand #(RISE_TIME, FALL_TIME) (G8O, G2O, CPN);
wire G5O, G6O ;
nand #(RISE_TIME, FALL_TIME) (G5O, G7O, G6O);
nand #(RISE_TIME, FALL_TIME) (G6O, G8O, G5O);
assign Q = G5O ;
assign QR = G6O ;
endmodule
testbench 编写如下:
`timescale 1ns/1ps
module test ;
reg D, CP = 0 ;
wire Q, QR ;
always #5 CP = ~CP ;
initial begin
D = 0 ;
#12 D = 1 ;
#10 D = 0 ;
#14 D = 1 ;
#3 D = 0 ;
#18 D = 0 ;
end
D_TRI u_d_trigger(
.D (D),
.CP (CP),
.Q (Q),
.QR (QR));
initial begin
forever begin
#100;
//$display("---gyc---%d", $time);
if ($time >= 1000) begin
$finish ;
end
end
end
endmodule // test
仿真结果如下。
由图可知,Q/QR 信号均在时钟 CP 下降沿采集到了 D 端信号,并在单周期内保持不变,且输出有延迟。

对 cap3 时刻进行放大,对延时进行追踪,如下图所示。
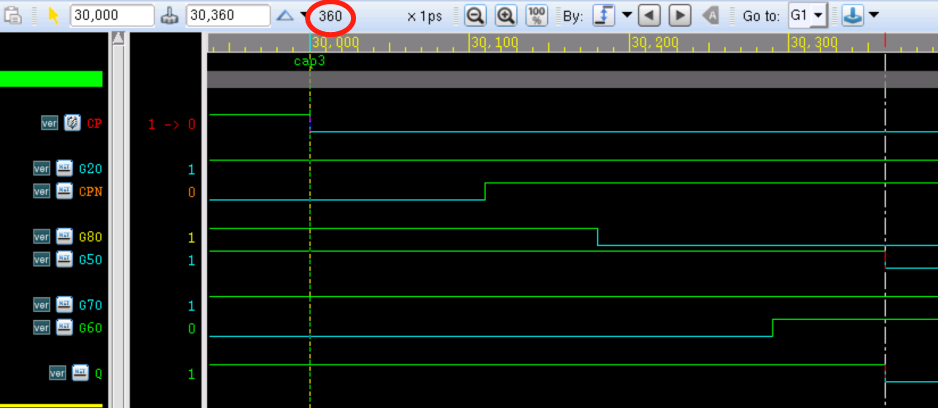
是否可以在所有delayed_job任务之前运行一个方法?基本上,我们试图确保每个运行delayed_job的服务器都有我们代码的最新实例,所以我们想运行一个方法来在每个作业运行之前检查它。(我们已经有了“check”方法并在别处使用它。问题只是关于如何从delayed_job中调用它。) 最佳答案 现在有一种官方方法可以通过插件来做到这一点。这篇博文通过示例清楚地描述了如何执行此操作http://www.salsify.com/blog/delayed-jobs-callbacks-and-hooks-in-rails(本文中描述
目录一、inout在设计文件中的使用方法1.1、inout的第一种使用方法1.2、inout实现的第二种使用方法1.3、inout使用总结 二、inout在仿真测试中的使用方法一、inout在设计文件中的使用方法在FPGA的设计过程中,有时候会遇到双向信号(既能作为输出,也能作为输入的信号叫双向信号)。比如,IIC总线中的SDA信号就是一个双向信号,QSPIFlash的四线操作的时候四根信号线均为双向信号。在Verilog中用关键字inout定义双向信号,这里总结一下双向信号的处理方法。1.1、inout的第一种使用方法 实际上,双向信号的本质是由一个三态门组成的,三态门可以输出高电平,低电
我有一些使用delayed_job的小程序。在我的本地主机上一切正常,但是当我将我的应用程序部署到Heroku并单击应该由delayed_job执行的链接时,没有任何反应,“任务”只是保存到表delayed_job中。Inthisarticleonherokublog写入时,执行delayed_job表中的任务,当运行此命令时rakejobs:work。但是我怎样才能运行这个命令呢?命令应该放在哪里?在代码中,还是从终端控制台? 最佳答案 如果您正在运行Cedar堆栈,请从终端控制台运行以下命令:herokurunrakejobs:
我是一个尝试使用delayed_job的NOOB。我想在使用延迟作业成功发送邮件后更新用户模型。发送邮件:UserMailer.delay.welcome_email(user)如果邮件发送成功,请执行以下操作:User.update_attributes(:emailed=>true)邮件发送成功后如何回调或触发? 最佳答案 您需要创建一个Job对象而不是调用#delay帮助程序。您可以使用successHook来执行回调。classWelcomeEmailJob 关于ruby-on-
我在运行多个工作器的设置中使用延迟作业。就我的问题而言,这并不重要,但假设我有10个worker(目前在开发模式下这样做)。我遇到的问题是两个不同的工作人员有时会开始处理同一个工作,调用我的工作对象的perform方法。据我所知,DelayedJob正在使用悲观锁定来防止这种情况发生,但有时它似乎仍然有足够的时间在第一个worker有时间实际锁定它之前锁定它。我只是想看看有没有其他人遇到过这个问题,或者是我的设置有问题。我正在使用Postrgres,这发生在我的开发机器和我托管它的Heroku上。我会尝试在我的工作中解决这个问题,但发生这种情况仍然有点问题。理想情况下,延迟作业永远不会
defperformrefund_log={success:refund_retry.success?,amount:refund_amount,action:"refund"}ifrefund_retry.success?refund_log[:reference]=refund_retry.transaction.idrefund_log[:message]=refund_retry.transaction.statuselserefund_log[:message]=refund_retry.messagerefund_log[:params]={}refund_retry.er
我正在使用DelayedJob来管理后台工作。但是我有一些任务需要定期执行。例如每小时、每天或每周。现在,当我执行任务时,我会创建一个新任务,在一天/一周/一个月内执行。不过我不是很喜欢。如果由于任何原因,任务没有完全执行,我们不会创建下一个任务,我们可能会失去任务的执行。您如何在Rails应用程序中管理此类事情(延迟作业)以确保您的常规任务列表保持正确? 最佳答案 如果你可以访问Cron,我强烈推荐Wheneverhttp://github.com/javan/whenever您指定要运行什么以及在简单的ruby中以什么频率运
我正在构建一个与RubyonRails后端对话的iPhone应用程序。RubyonRails应用程序还将为Web用户提供服务。restful_authentication插件是提供快速和可定制的用户身份验证的绝佳方式。但是,我希望iPhone应用程序的用户在新列中存储一个由手机的唯一标识符([[UIDevicedevice]uniqueIdentifier])自动创建的帐户。稍后,当用户准备好创建用户名/密码时,帐户将更新为包含用户名和密码,iPhone唯一标识符保持不变。用户在设置用户名/密码之前不能访问该网站。然而,他们可以使用iPhone应用程序,因为该应用程序可以使用它的标识符
Delayed::Job将您的类、方法和参数序列化到处理程序字段中。我们目前求助于将这种序列化方法硬编码到我们的代码中。这太恶心了。我们应该如何构建处理程序以便我们可以查找现有的排队作业? 最佳答案 这是我做的:1)添加两个新列到delayed_jobs表db/migrations/20110906004963_add_owner_to_delayed_jobs.rbclassAddOwnerToDelayedJobs2)添加多态关联到Delayed::Job模型config/initializers/delayed_job.rbc
如何在ruby中产生延迟?我使用了sleep语句,但它没有给我想要的东西。puts"amit"sleep(10)puts"scj"我希望它先打印amit,然后延迟10秒,然后打印scj。但在上述情况下,它会暂停10秒,然后同时打印amit和scj。我不想这样。我希望你明白我想说的。 最佳答案 我无法重现这个。在控制台中,这完全符合您的预期:puts"amit"sleep10puts"scj"(Linux上的Ruby1.8.6)您能否提供一个类似的简短但完整的示例,该示例没有做您想要的-或者更多地解释您的上下文?如果您正在编写Web应