准备材料:树莓派4b x1、读卡器、SD卡(16G以上)、笔记本电脑
准备软件:Raspberry Pi Imager(树莓派官方烧录工具)、putty
话不多说,直接上操作!!!!
一、Raspberry Pi Imager(树莓派官方烧录工具)安装
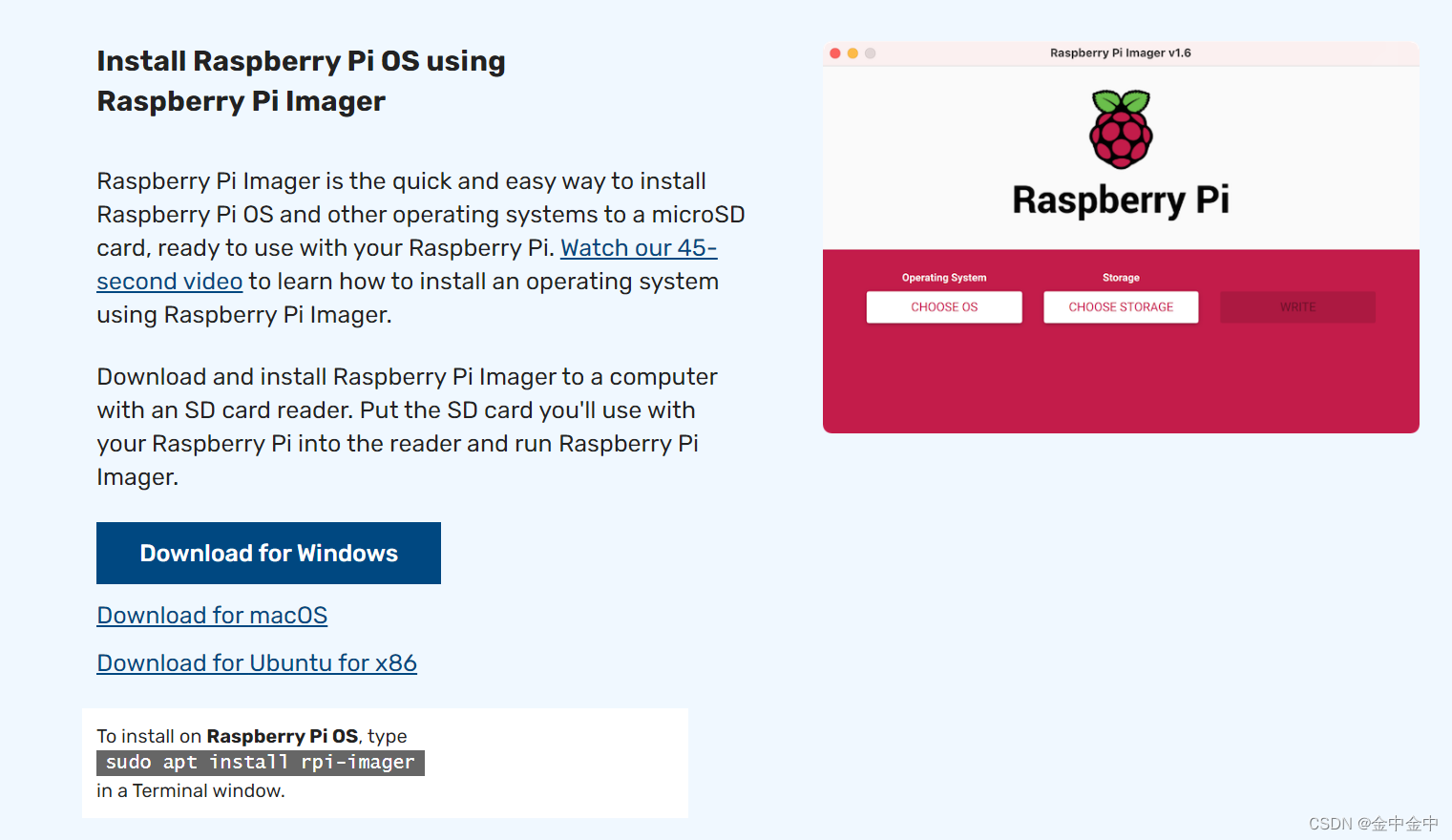
1、打开树莓派官方烧录工具下载页面Raspberry Pi OS – Raspberry Pi,根据自己的系统安装相应软件。这以Windows为例!!!点击Download for Windows,等待下载完成。
2、下载完成后,找到树莓派的下载路径,双击运行imager安装程序。点击Install后将会自动安装完成Raspberry Pi Imager。点击finsh完成安装。

3、Raspberry Pi Imager界面:

二、putty安装
1、打开putty官方安装网址Download PuTTY: latest release (0.77) (greenend.org.uk)![]() https://www.chiark.greenend.org.uk/~sgtatham/putty/latest.html
https://www.chiark.greenend.org.uk/~sgtatham/putty/latest.html
2、根据自己的需求选择版本。点击蓝色横向即可下载(这里选择的是64-bit x86)。
3、下载完成后在下载路径中打开下载好的putty安装程序。
在此页面更改putty安装路径:

安装完成:
三、烧录树莓派系统
1、打开电脑设置—>网络和Internet—>移动热点,打开热点开关,并修改电脑热点名称和密码。
2、打开安装好的树莓派官方烧录工具Raspberry Pi Imager。
3、将插好SD卡的读卡器插入电脑。点击选择SD卡,选择你的SD卡。

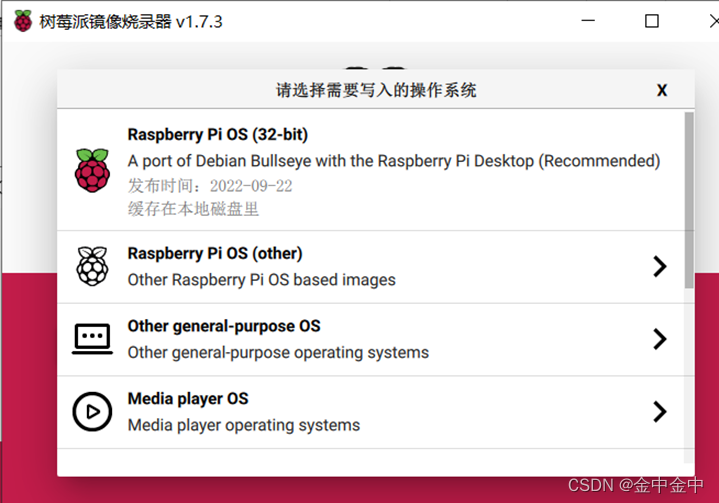
4、选择SD卡完毕后,点击选择操作系统,选择Raspberry Pi OS(32-bit)并点击。(如果首页没有显示,在Raspberry Pi OS(other)里找到Raspberry Pi OS(32-bit) A port of Debian Bullseye with the Raspberry Pi Desktop(Recommended)。)
5、返回树莓牌烧录工具主界面。点击右下角设置图标,按图进行操作。操作完成后点击保存。(确保登录密码、电脑热点账号、密码正确)




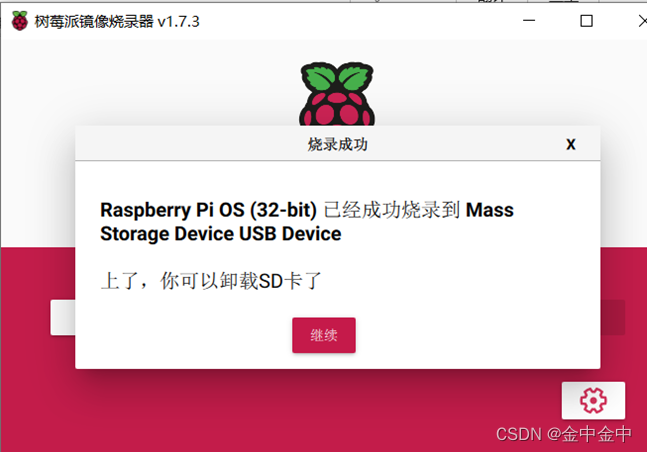
6、返回树莓牌烧录工具主界面,点击烧录按钮,等待系统写入SD卡。(时间可能较久,请耐心等待)烧录完成后点击继续,就可以将读卡器拔出电脑。
7、将SD卡插入树莓派相应位置。接通电源,等待树莓派启动并连接你的电脑热点。(时间可能会有点长,请耐心等待)连接热点后,在热点控制中心可以查看到树莓派的地址。
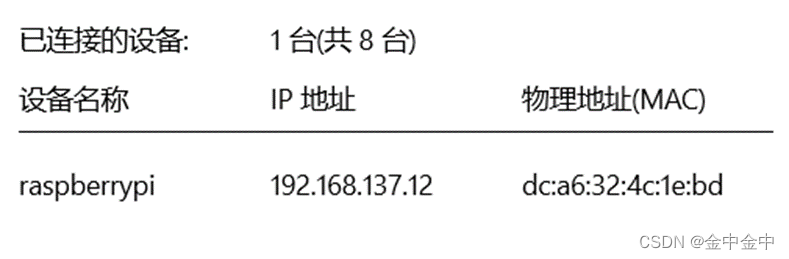
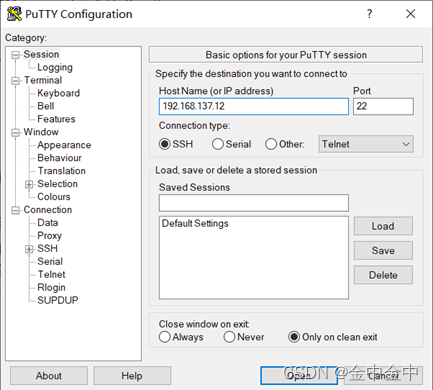
8、打开putty,将树莓派IP地址复制进输入栏后点击Open。
9、点击accept后输入账号:pi和密码:raspberry。(输入密码时密码不可见,请确保密码输入正确。)出现绿字pi@raspberrypi:~$表示进入系统成功。

10、因自带镜像不稳定,需要进行换源处理。将此代码点击鼠标右键复制粘贴进窗口并回车。系统会自动换源。换源完毕后输入:sudo reboot,将树莓派重启。
wget -qO- https://tech.biko.pub/resource/rpi-replace-apt-source-buster.sh | sudo bash11、树莓派重启完成连接你的电脑热点后重新使用putty进行登录(同8)。
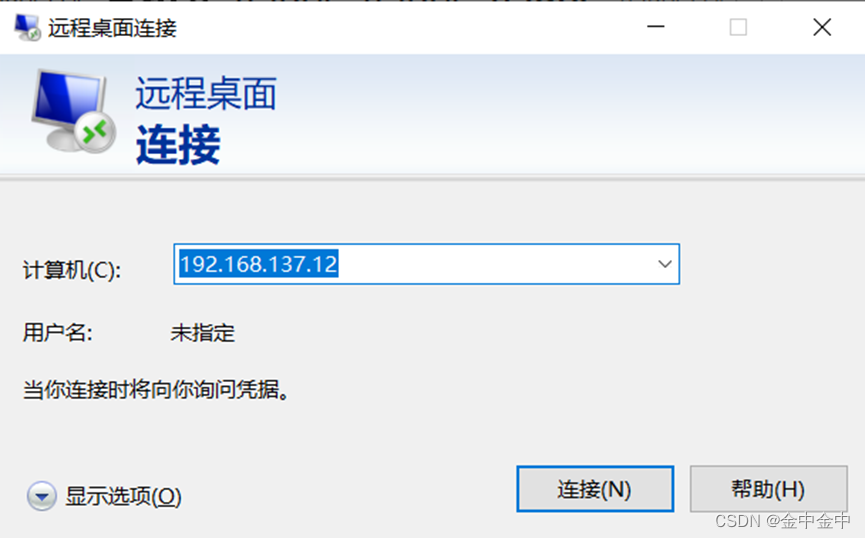
12、完成登录后在窗口输入sudo apt-get install xrdp回车后等待安装,如出现Do you want to continue?时输入y即可。等待安装完成。完成安装后打开自己电脑上的远程桌面连接,并将树莓派IP输入并点击连接。
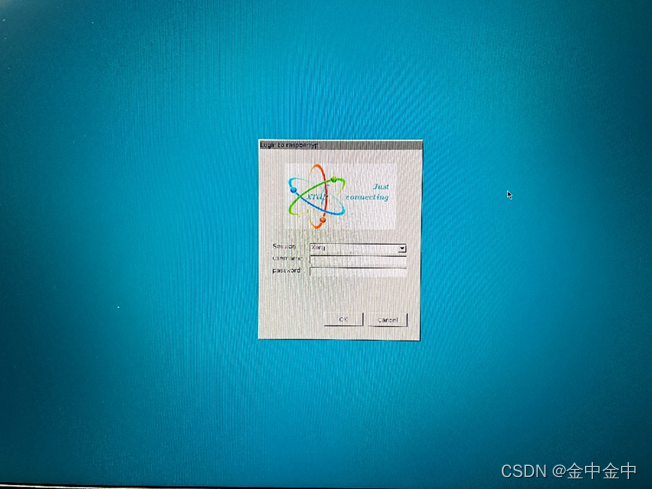
13、进入后呈现出此界面,输入树莓派的账号与密码。
14、完成登录后呈现此页面,点亮树莓派桌面完成。

大功告成!!!!撒花庆祝!!!
在使用官方烧录树莓派系统时经常遇到蓝屏事件,苦苦搜寻CSDN找了各位大佬的文章,最终在这两个大佬中找到了答案!!!
本文参考了以下几个文章
超简单教你在树莓派上安装opencv(一)_流 浪 猫的博客-CSDN博客_树莓派安装opencv文章目录前言一、我自己树莓派上烧的系统二、说正事——如何安装opencv1.查看自己的系统有几个python及python版本2.换源(非常非常重要,成不成功主要看这里)3.安装opencv三、测试opencv前言 本文章是基于python3写的一篇文章,大家需要先查看自己是否有python3。 OpenCV是程序员钟爱的开源计算机视觉库,拥有强大的内置函数和开源社群。OpenCV配合便携开源廉价的树莓派,可以直接读取来自树莓派摄像头PiCamera的视频,进行人脸识别、边缘检测、语义分割、自动https://blog.csdn.net/weixin_45911959/article/details/122709090超简单教你在树莓派上安装opencv(二)_流 浪 猫的博客-CSDN博客_树莓派安装opencv超简单教你在树莓派上安装opencv(二)前言一、如何基于python3.9.2安装OpenCv?1.1 查看自己的Python版本,跟对教程1.2 换源1.3 更新1.4 安装依赖1.5 查看自己树莓派的架构来确定下载什么包1.6 下载自己需要的 whl 包1.7 安装OpenCv二、报错了?!2.1 报出如下错误2.2 为啥会报错2.3 测试OpenCv前言使用须知:本文章主要是针对 Python3.9.2 版本的Python安装 OpenCv,如果你的 Python 版
https://blog.csdn.net/weixin_45911959/article/details/124157416树莓派——xrdp win10远程登录以及蓝屏问题_Yolanda_Vamper的博客-CSDN博客_树莓派远程连接蓝屏1.安装xrdp使用Putty命令行输入以下命令sudo apt-get install xrdpsudo apt-get install tightvncserver xrdp安装完成后,重启xrdp服务器sudo /etc/init.d/xrdp restart端口查看netstat -tnl2.Win10 远程桌面打开win10远程桌面,输入树莓派ip地址,可以通过打开cmdarp -a命令查看选择连接,用户名:pi 用户密码:raspber...
https://blog.csdn.net/Yolanda_Salvatore/article/details/106439903
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
1.postman介绍Postman一款非常流行的API调试工具。其实,开发人员用的更多。因为测试人员做接口测试会有更多选择,例如Jmeter、soapUI等。不过,对于开发过程中去调试接口,Postman确实足够的简单方便,而且功能强大。2.下载安装官网地址:https://www.postman.com/下载完成后双击安装吧,安装过程极其简单,无需任何操作3.使用教程这里以百度为例,工具使用简单,填写URL地址即可发送请求,在下方查看响应结果和响应状态码常用方法都有支持请求方法:getpostputdeleteGet、Post、Put与Delete的作用get:请求方法一般是用于数据查询,
我最喜欢的Google文档功能之一是它会在我工作时不断自动保存我的文档版本。这意味着即使我在进行关键更改之前忘记在某个点进行保存,也很有可能会自动创建一个保存点。至少,我可以将文档恢复到错误更改之前的状态,并从该点继续工作。对于在MacOS(或UNIX)上运行的Ruby编码器,是否有具有等效功能的工具?例如,一个工具会每隔几分钟自动将Gitcheckin我的本地存储库以获取我正在处理的文件。也许我有点偏执,但这点小保险可以让我在日常工作中安心。 最佳答案 虚拟机有些人可能讨厌我对此的回应,但我在编码时经常使用VIM,它具有自动保存功
我正在尝试上传文件。一个简单的hello.txt。我正在关注文档,但无法将其上传到我的存储桶。#STARTAWSCLIENTs3=Aws::S3::Resource.newbucket=s3.bucket(BUCKET_NAME)begins3.buckets[BUCKET_NAME].objects[KEY].write(:file=>FILE_NAME)puts"Uploadingfile#{FILE_NAME}tobucket#{BUCKET_NAME}."bucket.objects.eachdo|obj|puts"#{obj.key}=>#{obj.etag}"endresc
我有一个Highstock图表(带有标记和阴影的线条),并且想以编程方式显示一个highstock工具提示,例如,当我选择某个表上的一行(包含图表数据)我想显示相应的highstock工具提示。这可能吗? 最佳答案 股票图表thissolution不起作用:在thisexample你必须更换这个:chart.tooltip.refresh(chart.series[0].data[i]);为此:chart.tooltip.refresh([chart.series[0].points[i]]);解决方案可用here.
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
目录H2数据库入门以及实际开发时的使用1.H2数据库的初识1.1H2数据库介绍1.2为什么要使用嵌入式数据库?1.3嵌入式数据库对比1.3.1性能对比1.4技术选型思考2.H2数据库实战2.1H2数据库下载搭建以及部署2.1.1H2数据库的下载2.1.2数据库启动2.1.2.1windows系统可以在bin目录下执行h2.bat2.1.2.2同理可以通过cmd直接使用命令进行启动:2.1.2.3启动后控制台页面:2.1.3spring整合H2数据库2.1.3.1引入依赖文件2.1.4数据库通过file模式实际保存数据的位置2.2H2数据库操作2.2.1Mysql兼容模式2.2.2Mysql模式
我是syslog的新手。我们决定使用系统日志来跟踪Rails应用程序中的一些特殊事件。问题是我不想使用默认的/var/log/system.log文件,而是使用自定义文件,例如/var/log/myapp_events.log.我看到我必须像这样在/etc/syslog.conf中定义我自己的设施:myapp_events.*/var/log/myapp_events.log重新启动syslogd后,我发现我可以直接在bash控制台中使用它:syslog-s-kFacilitymyapp_eventsMessage"thisismymessage"该消息按预期出现在/var/log/m
我想强调的是,我正在寻找||=运算符被Ruby1.9.3解释器扩展的实际方式,而不是它出现的方式根据其行为进行扩展。我真正希望的是能够理解实际解释器源代码的人,遗憾的是我可能无法胜任这项任务。我发现似乎可以检查此问题的唯一资源已过时:“Ashort-circuit(||=)edgecase”。我上面提到的资源似乎暗示x||=y到x=x||的“官方”扩展y在1.9之前的解释器版本中要么不准确要么有错误。无论如何,指示的边缘情况似乎已被消除。上面的资源声称x||x=y或x或x=y“更准确”。然而,这些都不正确,因为当x是一个以前未声明的全局变量时它们不起作用:[11:04:18][****