HC-05是一款主从一体化的蓝牙模块,因此其使用起来比较方便,只需要进行简单的配置即可。
本文就手把手的介绍小白入手模块后如何使用。
对于模块使用:1、蓝牙配置→2、手机与蓝牙的传输→3、手机通过蓝牙模块控制单片机→4、一对蓝牙之间主—从传输数据,这是一个循循渐进的过程。
①做好准备工作:接线(需要一个CH340 USB→TTL模块)。
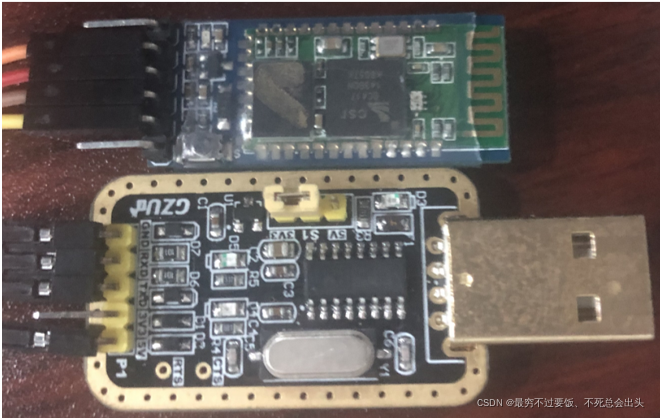
CH340模块 HC-05模块
VCC(5V) —————————— VCC
GND —————————— GND
RXD —————————— TXD
TXD —————————— RXD
②蓝牙模块有两种工作模式:命令相应模式、自动连接模式;
首先说一下如何进入命令响应模式与自动连接模式:
i 命令响应模式:在蓝牙模块中有一个小按键,将HC-05与CH340连接后长按着按钮给模块上电,led灯快闪。
ii自动连接模式:什么也不用管,将HC-05与CH340连接后,插上电脑上电即可,led慢闪。
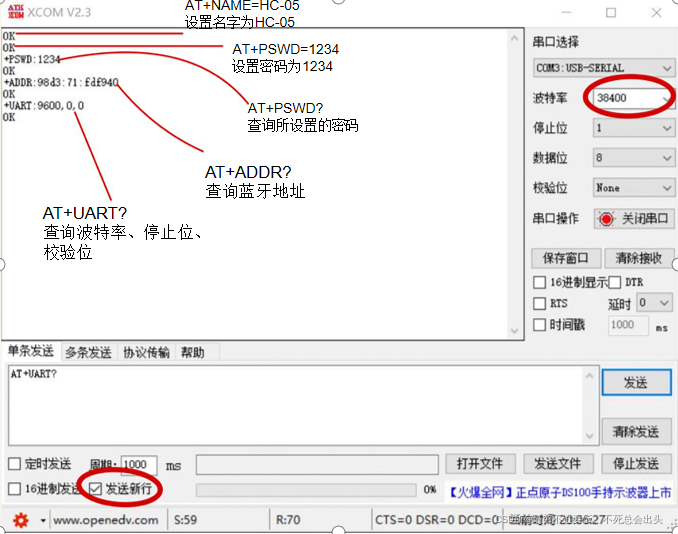
命令响应模式:是用AT对蓝牙模块工作的配置(相当于蓝牙模块的初始化配置各种参数)
波特率固定为:38400(即向HC-05写AT指令时波特率为38400)
常用的几种AT指令:(选上发送新行)
| 指令名 | 响应 | 含义 |
| AT+RESET | OK | 模块复位 |
| AT+ORGL | OK | 恢复默认状态 |
| AT+ADDR? | +ADDR:Param OK | 获得蓝牙模块地址 |
| AT+NAME=Param | OK | 设置设备名称 Parm:想要设置的名字 |
| AT+NAME? | +NAME:Param OK | 获得设备名称 |
| AT+PSWD=Param | OK | 设置模块密码 Parm:想要设置的密码;,默认为“1234” |
| AT+PSWD? | +PSWD:Param OK | 获得模块密码 |
| AT+UART=Param1,Param2,Param3 | OK | 设置串口参数 Param1:波特率 ; Param2:停止位 ;Param3:校验位 |
| AT+UART? | +UART:Param1,Param2,Param3 OK | 获得串口参数 |
| AT+ROLE=Param | +ROLE:Param OK | Param:参数取值如下:0—从角色;1—主角色;2—回环角色;默认值:0 |
AT指令错误返回
| 错误码 | 说明 |
| 0 | AT 命令错误 |
| 1 | 指令结果为默认值 |
| 2 | PSKEY 写错误 |
| 3 | 设备名称太长(超过 32 个字 |
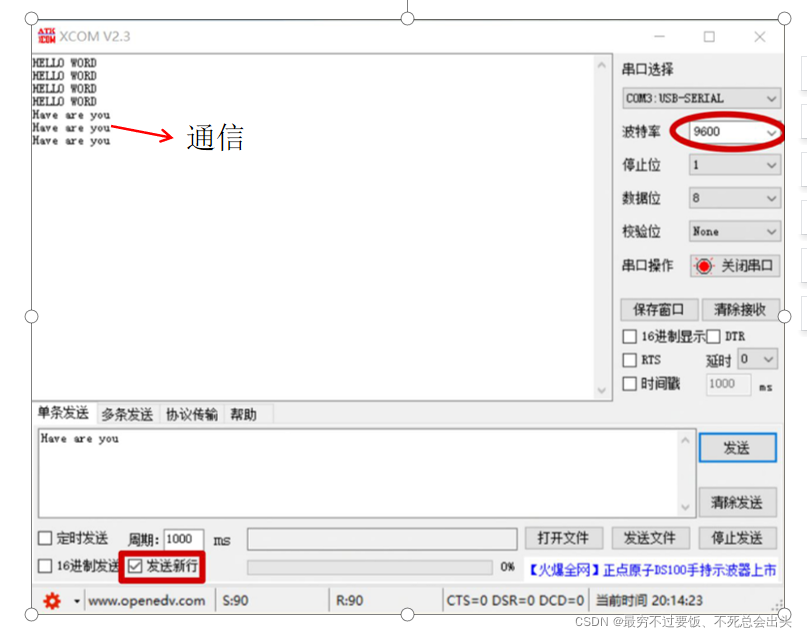
自动连接模式:将自动根据命令响应模式下事先设定的方式连接的数据传输(在该模式下才能与手机等其他蓝牙设备连接) 波特率默认:9600(即HC-05与其他蓝牙通信时默认波特率为9600)
想要手机与蓝牙进行传输数据,首先肯定要建立手机与蓝牙的连接,(和我们用的蓝牙耳机差不多,首先得先在手机上找到蓝牙设备,并进行连接),那么问题来了,应该如何连接。
第一步:配置蓝牙模块基本信息
AT+NAME=HC-05 修改蓝牙模块名称为HC-05
AT+ROLE=0 蓝牙模式为从模式
AT+CMODE=1 蓝牙连接模式为任意地址连接模式,也就是说 该模块可以被任意蓝牙设备连接
AT+PSWD=1234 蓝牙配对密码为1234
AT+UART=9600,0,0 蓝牙通信串口波特率为9600,停止位1位, 无校验位
第二步:在手机上下载“蓝牙调试助手”
本人所用的蓝牙串口助手是自己使用appinventor开发的app,功能还算可以,若大家有更好用的app可以将下载连接放在评论区,共享一下!!!嘿嘿嘿
此处是下载连接:链接:https://pan.baidu.com/s/1r21BoQ8snUzCl0Iy59Pzgw
提取码:yzh0
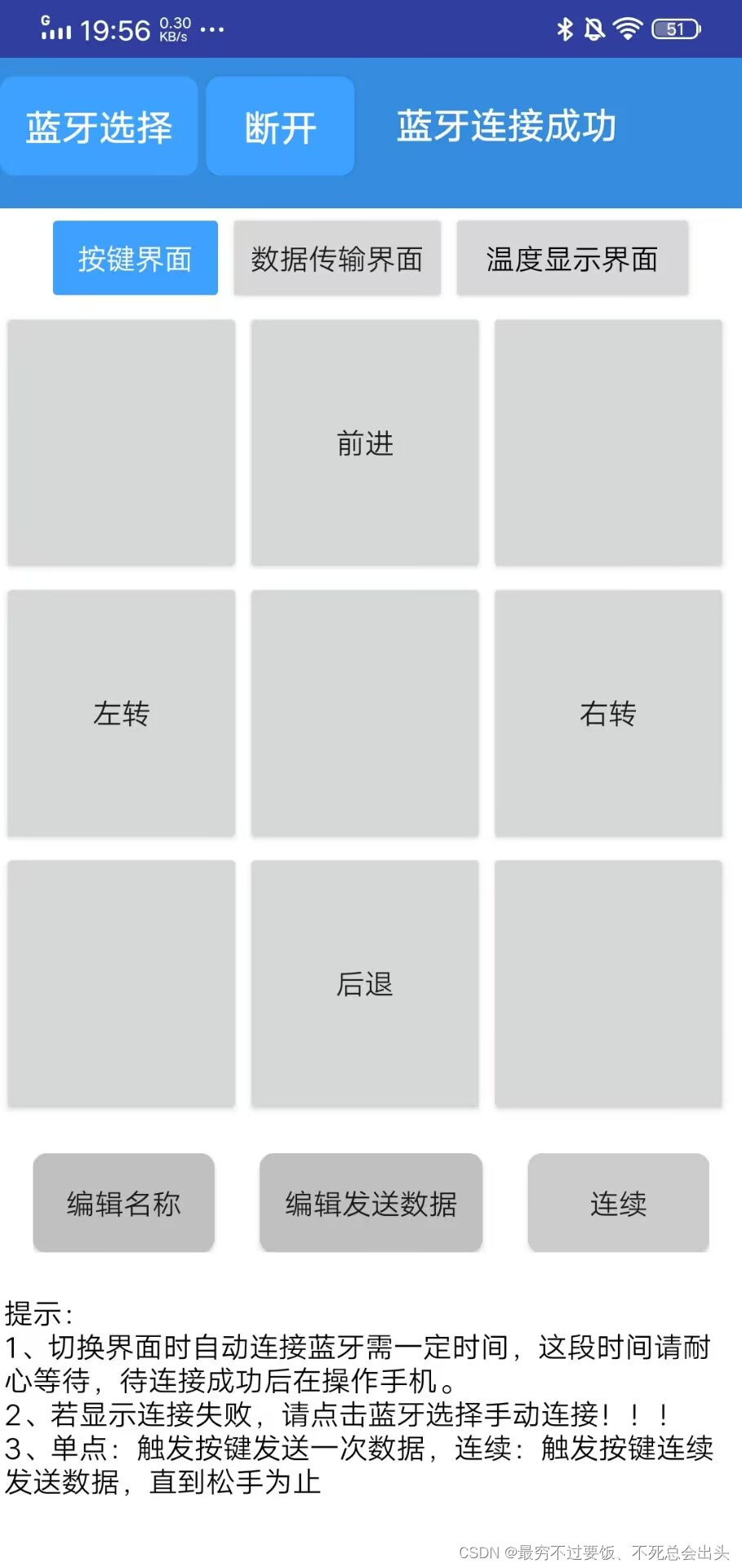
连接步骤:1、在手机连接之前,一定要现在设置中与蓝牙模块配对,然后再用蓝牙app连接蓝牙
2、打开蓝牙APP,点击左上角连接蓝牙模块,app右上角显示当前连接是否成功(若连 接失败,检查蓝牙模块是否正常,没问题重新连接即可)。

手机蓝牙串口助手向单片机 发送“1”,点亮LED灯。
发送"0",关闭LED灯。
蓝牙串口助手,有编辑名称按键、编辑发送数据按键。 通过给按钮赋值,发送需要的数据,方便快捷。



①51单片机程序:
/*****************************************************************
接线方式:
单片机的TXD-->HC-05的RXD
单片机的RXD-->HC-05的TXD
P1.0口 接 LED的阴极
VCC 接 LED的阳极
*****************************************************************/
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit LED=P1^0;
/*****************************************************************
*接收中断服务子程序
*****************************************************************/
void Uart_Isr(void) interrupt 4
{
uchar Recv;
if(RI==1)
{
RI=0;
Recv = SBUF; //接收数据
if(Recv == '1')
{
LED = 0;//接收到1亮灯
}
else
{
LED = 1; //其他情况灯灭
}
}
}
/*****************************************************************
*串口初始化
*****************************************************************/
void Uart_Init(void)
{
SCON = 0x50; //方式1 8位数据 接收地址甄别禁止 接收使能 0101 0000
PCON = 0x00; //波特率不增倍
TMOD = 0x20; //T1,8位自动重装
TH1 = 0xfd; //波特率9600
TL1 = 0xfd;
EA = 1;
ES = 1;
TR1 = 1; //启动t1
}
/*****************************************************************
*主程序
*****************************************************************/
void main(void)
{
Uart_Init();
while(1);
}②:stm32程序
main.c:
int main(void)
{
u8 receive_data;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //NVIC分组2:2位抢占优先级,2位响应优先级
delay_Init(); // 延时初始化(注:调用延时函数之前,必须先调用delay_Init()将SysTick初始化)
uart2_init(9600);
while(1)
{
if(USART_GetFlagStatus(USART2,USART_FLAG_RXNE)==1)
{
receive_data=USART_ReceiveData(USART2);
if(receive_data == 0x31) // PA1输出高,点亮LED
{
GPIO_SetBits(GPIOA,GPIO_Pin_1);
}
else if(receive_data == 0x30) // PA1输出高,点亮LED
{
GPIO_ResetBits(GPIOA,GPIO_Pin_1);
}
}
}
}#include "usart2.h"
//
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "includes.h" //ucos 使用
#endif
void uart2_init( u32 bound )
{
/* GPIO端口设置 */
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE );
RCC_APB1PeriphClockCmd( RCC_APB1Periph_USART2, ENABLE ); /* 使能USART1,GPIOA时钟 */
/* PA2 TXD2 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init( GPIOA, &GPIO_InitStructure );
/* PA3 RXD2 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init( GPIOA, &GPIO_InitStructure );
/* USART 初始化设置 */
USART_InitStructure.USART_BaudRate = bound; /* 串口波特率 */
USART_InitStructure.USART_WordLength = USART_WordLength_8b; /* 字长为8位数据格式 */
USART_InitStructure.USART_StopBits = USART_StopBits_1; /* 一个停止位 */
USART_InitStructure.USART_Parity = USART_Parity_No; /* 无奇偶校验位 */
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; /* 无硬件数据流控制 */
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; /* 收发模式 */
USART_Init( USART2, &USART_InitStructure ); /* 初始化串口1 */
USART_Cmd( USART2, ENABLE ); /* 使能串口 2 */
}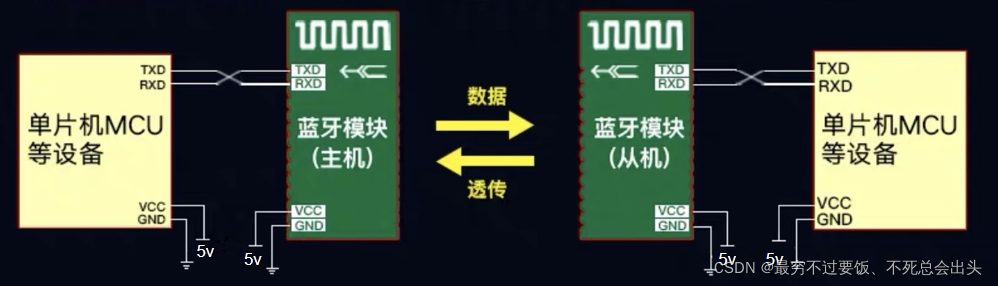
用于两个单片机中间非连线通讯
这时需要两个蓝牙模块,将其中一个设置成主机,另一个设置成从机。
(主蓝牙) (从蓝牙)
AT+NAME=CH-05-Z AT+NAME=CH-05-C (设置蓝牙名称)
AT+PSWD=1234 AT+PSWD=1234 (设置蓝牙密码)
AT+ROLE=1 AT+ROLE=0 (设置主从:0为从1为主)
AT+ADDR? AT+ADDR? (查询蓝牙地址)
AT+UART:9600,0,0 AT+UART:9600,0,0 (设置波特率9600)
AT+LINK=从蓝牙地址(蓝牙相互连接) AT+BIND=master的地址(查询之后绑定主蓝)
注意:一定要保证两蓝牙的密码一样
以上配置可以在电脑端通过串口调试助手配置好,然后单片机接上蓝牙模块即可,模块上电后主从机会自动建立连接,连接成功后,主从机就可以通过串口通信了(透传模式 :发什么收什么)。
假设我做了一个模块如下:m=Module.newdoclassCendend三个问题:除了对m的引用之外,还有什么方法可以访问C和m中的其他内容?我可以在创建匿名模块后为其命名吗(就像我输入“module...”一样)?如何在使用完匿名模块后将其删除,使其定义的常量不再存在? 最佳答案 三个答案:是的,使用ObjectSpace.此代码使c引用你的类(class)C不引用m:c=nilObjectSpace.each_object{|obj|c=objif(Class===objandobj.name=~/::C$/)}当然这取决于
作为我的Rails应用程序的一部分,我编写了一个小导入程序,它从我们的LDAP系统中吸取数据并将其塞入一个用户表中。不幸的是,与LDAP相关的代码在遍历我们的32K用户时泄漏了大量内存,我一直无法弄清楚如何解决这个问题。这个问题似乎在某种程度上与LDAP库有关,因为当我删除对LDAP内容的调用时,内存使用情况会很好地稳定下来。此外,不断增加的对象是Net::BER::BerIdentifiedString和Net::BER::BerIdentifiedArray,它们都是LDAP库的一部分。当我运行导入时,内存使用量最终达到超过1GB的峰值。如果问题存在,我需要找到一些方法来更正我的代
我有一个包含模块的模型。我想在模块中覆盖模型的访问器方法。例如:classBlah这显然行不通。有什么想法可以实现吗? 最佳答案 您的代码看起来是正确的。我们正在毫无困难地使用这个确切的模式。如果我没记错的话,Rails使用#method_missing作为属性setter,因此您的模块将优先,阻止ActiveRecord的setter。如果您正在使用ActiveSupport::Concern(参见thisblogpost),那么您的实例方法需要进入一个特殊的模块:classBlah
我有一个在Linux服务器上运行的ruby脚本。它不使用rails或任何东西。它基本上是一个命令行ruby脚本,可以像这样传递参数:./ruby_script.rbarg1arg2如何将参数抽象到配置文件(例如yaml文件或其他文件)中?您能否举例说明如何做到这一点?提前谢谢你。 最佳答案 首先,您可以运行一个写入YAML配置文件的独立脚本:require"yaml"File.write("path_to_yaml_file",[arg1,arg2].to_yaml)然后,在您的应用中阅读它:require"yaml"arg
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
我刚刚被困在这个问题上一段时间了。以这个基地为例:moduleTopclassTestendmoduleFooendend稍后,我可以通过这样做在Foo中定义扩展Test的类:moduleTopmoduleFooclassSomeTest但是,如果我尝试通过使用::指定模块来最小化缩进:moduleTop::FooclassFailure这失败了:NameError:uninitializedconstantTop::Foo::Test这是一个错误,还是仅仅是Ruby解析变量名的方式的逻辑结果? 最佳答案 Isthisabug,or
我想获取模块中定义的所有常量的值:moduleLettersA='apple'.freezeB='boy'.freezeendconstants给了我常量的名字:Letters.constants(false)#=>[:A,:B]如何获取它们的值的数组,即["apple","boy"]? 最佳答案 为了做到这一点,请使用mapLetters.constants(false).map&Letters.method(:const_get)这将返回["a","b"]第二种方式:Letters.constants(false).map{|c
我的假设是moduleAmoduleBendend和moduleA::Bend是一样的。我能够从thisblog找到解决方案,thisSOthread和andthisSOthread.为什么以及什么时候应该更喜欢紧凑语法A::B而不是另一个,因为它显然有一个缺点?我有一种直觉,它可能与性能有关,因为在更多命名空间中查找常量需要更多计算。但是我无法通过对普通类进行基准测试来验证这一点。 最佳答案 这两种写作方法经常被混淆。首先要说的是,据我所知,没有可衡量的性能差异。(在下面的书面示例中不断查找)最明显的区别,可能也是最著名的,是你的
我一直致力于让我们的Rails2.3.8应用程序在JRuby下正确运行。一切正常,直到我启用config.threadsafe!以实现JRuby提供的并发性。这导致lib/中的模块和类不再自动加载。使用config.threadsafe!启用:$rubyscript/runner-eproduction'pSim::Sim200Provisioner'/Users/amchale/.rvm/gems/jruby-1.5.1@web-services/gems/activesupport-2.3.8/lib/active_support/dependencies.rb:105:in`co
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m