文章目录
读完本篇文章你的收获:
先上效果图:
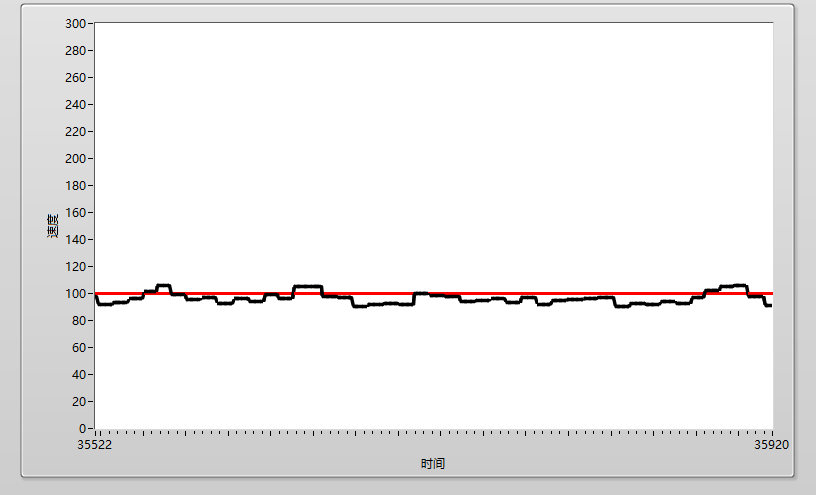
在工程中,如果我们要用单片机做一个温控系统,其系统组成一般如下:一个采集温度的ADC,一个输出温度的加热头以及一个用于运行控制算法的单片机,如果我们要维持温度为100度,在不加任何控制算法的情况下,我们可以通过简单的阈值判断法来控制温度,一个if判断语句,当采集到的温度大于100时,单片机控制加热头关闭,当采集的温度小于100度时,单片机则控制加热头开启,简单粗暴,但这样的控制方法,最终所展示出来的温度曲线是极其不稳定的,他会由于控制器件的灵敏程度、加热头的性能等等原因,导致最终的温度曲线会在目标周围震荡,达不到理想的控制效果,就像下图:实际曲线(黑线) 在 目标曲线(红线) 周围抖动
那如何才能维持实际曲线与目标曲线贴合,达到一个稳定的控制效果呢?
这里就引入了PID控制算法的概念,PID是 Proportion Integration Differentiation 的缩写,实际上他就是一个公式,由比例项(Proportion ),积分项(Integration ),微分项(Differentiation) 三个部分组成,具体形式就是下面的公式:

其中 err(t) 就是当前值和目标值的误差,PID的公式就是对这个误差分别进行比例、积分、微分处理后叠加输出,因为比例计算、积分计算、微分计算在数学公式上的计算定义不同,所以对应的项的输出特性和输入特性也有着不同,具体解释如下:
比例控制系数,实际上就是先简单的定义输入与输出的线性关系,假如我们输出控制量的值得范围在 100-1000,输入的err误差范围却在0.001-0.1;当误差为0.1的时候输出量需要到达到1000,这时我们就需要通过比例系数来构建输入与输出的线性关系
上一点我们分析了比例系数的含义,有小伙伴可能会好奇,比例系数加上后的效果其实和阈值判断原理没什么区别,确实是这样,只用上比例系数的效果和阈值判断没什么区别,但别忘了,PID后面还有I和D两项,其中I项的理解我们可以从积分的含义来理解,积分可以理解为在坐标平面上,由曲线、直线以及轴围成的曲形的面积值,这个曲线就是err(t)的函数,这个积分面积值就是代表过去一段时间的误差累计值,我们把这个累计值乘以系数进行变换后,叠加到输出上,就可以一定程度上消除历史误差对当前实际曲线的影响,提高系统的稳定性
微分的数学理解可以理解为当前误差曲线的斜率,他可以用来预测当前曲线的未来走势,对微分项的值进行处理后叠加,就可以预测当前值的未来趋势,提高系统对未来变化反应能力
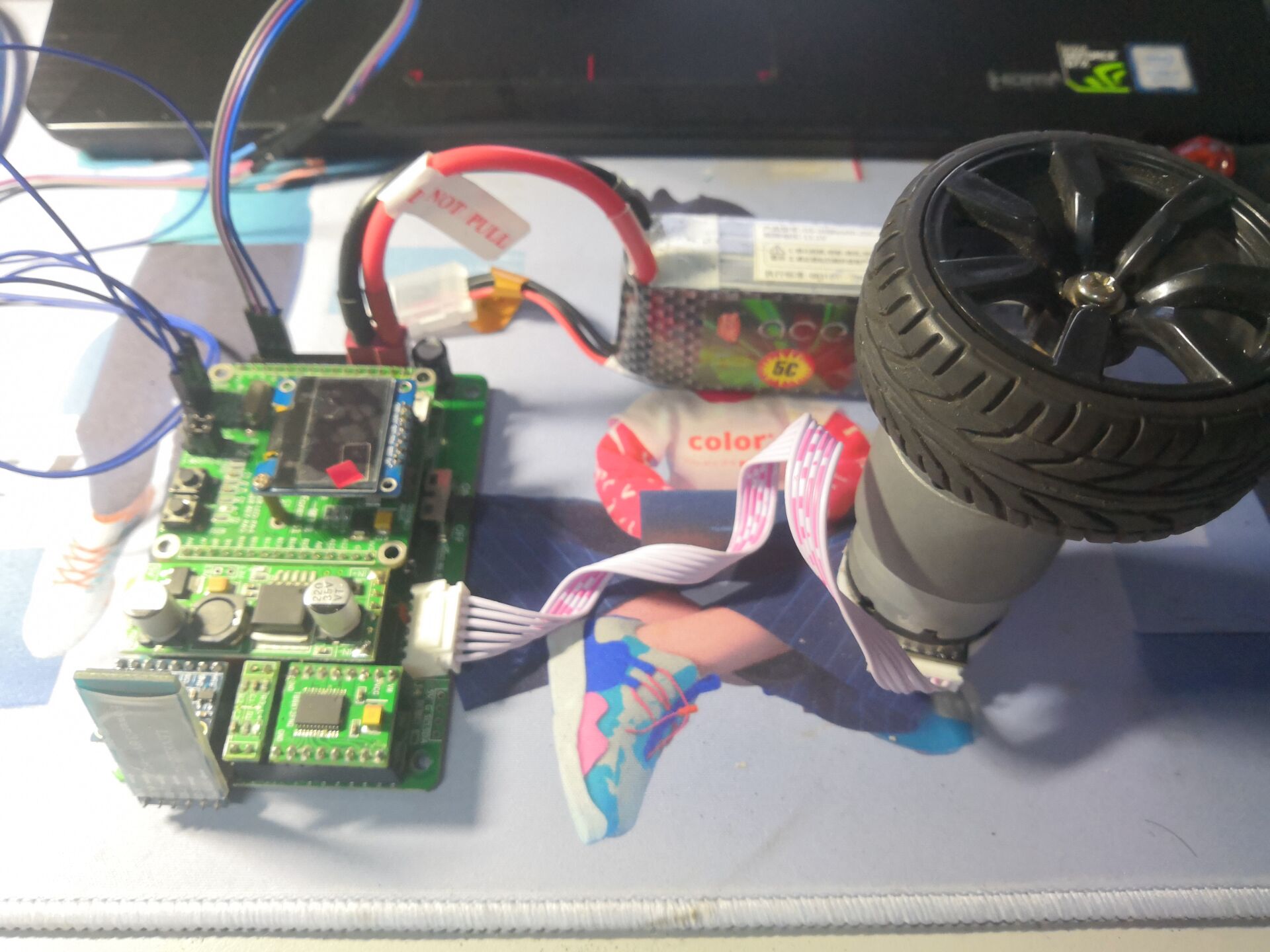
通过上一小节的分析,我们对PID的三个项有了一个简单的理解,但文字上的描述还是太抽象了,我以一个小车调速系统来做进一步讲解,结合实际现象来分析PID三个参数的实际作用,以及如何调这三个参数,用到的实验平台如下
平衡小车之家的主控板及电机
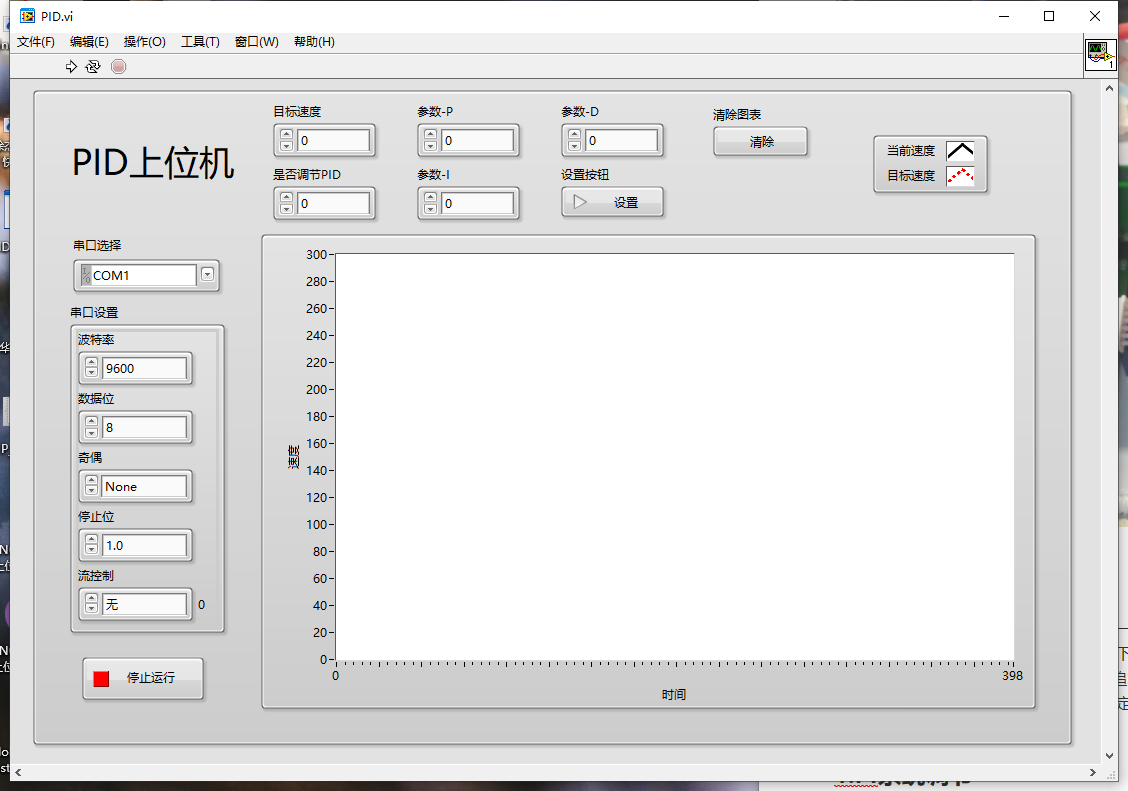
自己编写的调试上位机
控制系统图片:
上位机界面:
我们在使用PID的时候,单独只使用一个参数是没有意义的至少使用两个参数,并且P(比例项)是必须要有的,虽然PID有三个参数,但大多数情况下PID三个参数并不是都使用上的,一般会其中两个来组合使用,比如PI组合用于追求稳定的系统,PD组合用于追求快速响应的系统,当然PID用于即追求稳定又追求快速响应的系统,但是实际上PID参数越多越难调,而且许多情况下两个参数的效果已经足够了,所以我一般根据情况使用前两个,下面对这几个系统都做一个分析
调节PI系统的第一步就是先调节P,由小到大依次调节,P的值可以很明显的在输出曲线体现出来,比如我先给P=0.05,系统反应如下,当P过小时,曲线呈现缓慢上升,且最终值会明显低于目标值
当我们加大P到0.15时,我们可以看到实际曲线很快的接近目标值,但因为只有单纯P控制,所以有较大的过冲(过冲就是实际值达到目标值时刹不住车,冲出去了),但在他稳定的时候,实际曲线基本接近目标曲线
如果P再增大到0.25,可以看到,实际曲线需要震荡很久才会达到稳定目标线,但在稳定后基本和目标线保持一致
如果P过大,整个系统就会不受控,实际曲线不会收敛到目标曲线位置,出现等幅震荡,比如P=0.45时
在调节PI系统时,P的选取一般有两种情况
P偏小一点,稳定时,实际值在目标值之下,一直存在误差,这时再从0开始,一直加大I,消除稳定时的误差,这种情况下的最终稳定曲线会一直保持在目标曲线之下,达到比较稳定的调节效果,不会有过冲
(无过冲,稳定!)
P大一点,在第一次到达目标值的时候有一定的过冲,但之后就会稳定,其与第一种相比反应速度更快!
(有过冲,但他快!)
下面展示第一种PI控制方式,选取P=0.5(偏小)时,再用I消除稳定时的稳态误差,达到稳定的效果:
I积分的值这里我展示了三个,分别为较小,刚好,和较大时的实际曲线,用来做对比!
P=0.5,I=0.00005,I选取较小,可以看到相对于单纯的P=0.5,稳定误差有一定消除,但消除程度不够!
在加大I到0.0001,刚刚好的时候,实际曲线和目标曲线基本重合!!!
当I过大取0.002时,因为累计误差占比过大,就会出现抖动现象,难以收敛
上面就是第一种PI调节情况,虽然PI系统平衡过程很稳定,但到达目标位置的反应速度较慢,有的时候为了提高反馈速度,适当的提高P,允许有一定的过冲,比如我取P=0.07,对应的I取0.0001时,波形如下,该系统允许一定的过冲,但可以更快的到达目标点后再趋于稳定,这就是第二种PI系统的调节方式,
以上基本就是PI系统的调节过程了,下面我讲一下PD系统的调节过程
由一开始的概念我们可以知道,与 I 的不同点在于,I是计算累计误差,而D则是计算未来趋势,因此PD系统的反应速度更快,相对于PI系统会更快的到达目标位置附近,其调节方式首先还是调节P,这里我们根据PI中P的调节结果,调节P到比大的位置,出现一定的过冲,这里取P=0.15,不加D的时候图形如下:
从图像可以看出:P=0.15在开始时过冲严重,所以加上一个D来减小过冲幅度,D的选取和I的选取一样,从0慢慢增加,观看效果确定合适的点,下面一张图的D=1.5是我试出来比较合适的点,我们可以看到加上合适的D之后,实际曲线到达目标位置的时间更短,过冲幅度也降低了一些,但是这里效果不是很明显,主要原因是我这里使用的是小车轮子来做的速度PID,而PD的应用场合主要是大惯性系统中,这里的应用场景不适合,但也能看出一定效果
如果D调节的过大之后,反倒会放大系统趋势的影响,使系统出现震荡,难以稳定,如下D=5
在讲了PI和PD系统的调节方式后,下面分享一下PID系统的调节方式,首先我们先按照PI系统进行调节,先调P在调I,让系统有一定的过冲后达到稳定,如下图:
在出现了上面的 PI 波形之后,下面就开始调节D,慢慢增加D,将过冲补偿掉,直到系统稳定,最终效果如下图,PID系统就基本调节完成了
这篇文章的PID讲解内容就到这里了,下一篇文章将会详细分享我常使用的PID调用代码,帮助大家PID进一步入门
第二篇已更新,文章链接:从0编写一份PID控制代码
铁子们!觉得有用就一键三连吧!
往期精选文章推荐
一、什么是MQTT协议MessageQueuingTelemetryTransport:消息队列遥测传输协议。是一种基于客户端-服务端的发布/订阅模式。与HTTP一样,基于TCP/IP协议之上的通讯协议,提供有序、无损、双向连接,由IBM(蓝色巨人)发布。原理:(1)MQTT协议身份和消息格式有三种身份:发布者(Publish)、代理(Broker)(服务器)、订阅者(Subscribe)。其中,消息的发布者和订阅者都是客户端,消息代理是服务器,消息发布者可以同时是订阅者。MQTT传输的消息分为:主题(Topic)和负载(payload)两部分Topic,可以理解为消息的类型,订阅者订阅(Su
TCL脚本语言简介•TCL(ToolCommandLanguage)是一种解释执行的脚本语言(ScriptingLanguage),它提供了通用的编程能力:支持变量、过程和控制结构;同时TCL还拥有一个功能强大的固有的核心命令集。TCL经常被用于快速原型开发,脚本编程,GUI和测试等方面。•实际上包含了两个部分:一个语言和一个库。首先,Tcl是一种简单的脚本语言,主要使用于发布命令给一些互交程序如文本编辑器、调试器和shell。由于TCL的解释器是用C\C++语言的过程库实现的,因此在某种意义上我们又可以把TCL看作C库,这个库中有丰富的用于扩展TCL命令的C\C++过程和函数,所以,Tcl是
开门见山|拉取镜像dockerpullelasticsearch:7.16.1|配置存放的目录#存放配置文件的文件夹mkdir-p/opt/docker/elasticsearch/node-1/config#存放数据的文件夹mkdir-p/opt/docker/elasticsearch/node-1/data#存放运行日志的文件夹mkdir-p/opt/docker/elasticsearch/node-1/log#存放IK分词插件的文件夹mkdir-p/opt/docker/elasticsearch/node-1/plugins若你使用了moba,直接右键新建即可如上图所示依次类推创建
文章目录概念索引相关操作创建索引更新副本查看索引删除索引索引的打开与关闭收缩索引索引别名查询索引别名文档相关操作新建文档查询文档更新文档删除文档映射相关操作查询文档映射创建静态映射创建索引并添加映射概念es中有三个概念要清楚,分别为索引、映射和文档(不用死记硬背,大概有个印象就可以)索引可理解为MySQL数据库;映射可理解为MySQL的表结构;文档可理解为MySQL表中的每行数据静态映射和动态映射上面已经介绍了,映射可理解为MySQL的表结构,在MySQL中,向表中插入数据是需要先创建表结构的;但在es中不必这样,可以直接插入文档,es可以根据插入的文档(数据),动态的创建映射(表结构),这就
【适用平台】私有云 说明:完成私有云部分是需要两台虚拟机的,分别为controller、compute两个节点,但我们只需配置一台,然后克隆就方便多啦!需要用到的映射文件:关于vm的安装我就不介绍的,毕竟挺简单的,下面让我们看看基于私有云模块中,虚拟机的搭建吧。1、创建新的虚拟机,这里一般我会选择自定义,毕竟后面的配置都要根据私有云相关来进行搭建,会比较复杂。(如果是基础的可以选择典型,典型的满足一般虚拟机的配置) 2、选择稍后安装操作系统会比较方便后续的选择,这里你也可以自己选择自己的映像文件(但不建议) 3、我们是基于Linux下操作的,所以选择Linux客户机操作系统,版本选择自己
HTTP缓存是指浏览器或者代理服务器将已经请求过的资源保存到本地,以便下次请求时能够直接从缓存中获取资源,从而减少网络请求次数,提高网页的加载速度和用户体验。缓存分为强缓存和协商缓存两种模式。一.强缓存强缓存是指浏览器直接从本地缓存中获取资源,而不需要向web服务器发出网络请求。这是因为浏览器在第一次请求资源时,服务器会在响应头中添加相关缓存的响应头,以表明该资源的缓存策略。常见的强缓存响应头如下所述:Cache-ControlCache-Control响应头是用于控制强制缓存和协商缓存的缓存策略。该响应头中的指令如下:max-age:指定该资源在本地缓存的最长有效时间,以秒为单位。例如:Ca
如何用IDEA2022创建并初始化一个SpringBoot项目?目录如何用IDEA2022创建并初始化一个SpringBoot项目?0. 环境说明1. 创建SpringBoot项目 2.编写初始化代码0. 环境说明IDEA2022.3.1JDK1.8SpringBoot1. 创建SpringBoot项目 打开IDEA,选择NewProject创建项目。 填写项目名称、项目构建方式、jdk版本,按需要修改项目文件路径等信息。 选择springboot版本以及需要的包,此处只选择了springweb。 此处需特别注意,若你使用的是jdk1
为了停止Sidekiq,我需要使用:$bundleexecsidekiqctlstop/Users/me/Documents/sites/some_site/tmp/pid/sidekiq.pid20我告诉Sidekiq在config.yml文件中创建一个pid文件:#/Users/me/Documents/sites/some_site/config.yml:pidfile:/Users/me/Documents/sites/some_site/tmp/pids/sidekiq.pid:concurrency:25并告诉Sidekiq这个配置文件在哪里使用:$bundleexecsi
前言上一篇我们简要讲述了粒子系统是什么,如何添加,以及基本模块的介绍,以及对于曲线和颜色编辑器的讲解。从本篇开始,我们将按照模块结构讲解下去,本篇主要讲粒子系统的主模块,该模块主要是控制粒子的初始状态和全局属性的,以下是关于该模块的介绍,请大家指正。目录前言本系列提要一、粒子系统主模块1.阅读前注意事项2.参考图3.参数讲解DurationLoopingPrewarmStartDelayStartLifetimeStartSpeed3DStartSizeStartSize3DStartRotationStartRotationFlipRotationStartColorGravityModif
VMware虚拟机与本地主机进行磁盘共享前提虚拟机版本为Windows10(专业版,不是可能有问题)本地主机为家庭版或学生版(此版本会有问题,但有替代方式)最好是专业版VMware操作1.关闭防火墙,全部关闭。2.打开电脑属性3.点击共享-》高级共享-》权限4.如果没有everyone,就添加权限选择完全控制,然后应用确定。5.打开cmd输入lusrmgr.msc(只有专业版可以打开)如果不是专业版,可以跳过这一步。点击用户-》administrator密码要复杂密码,否则不行。推荐admaiN@1234类型的密码。设置完密码,点击属性,将禁用解开。6.如果虚拟机的windows不是专业版,可