文章目录
语义分割的目标:是将一个场景分割成几个有意义的部分,通常是用语义标记图像中的每个像素(pixel-level semantic segmentation),或者同时检测对象并进行逐像素标记(instance-level semantic segmentation)。
最近,为了统一pixel-level semantic segmentation和instance-level semantic segmentation,提出了全景分割(panoptic segmentation)。
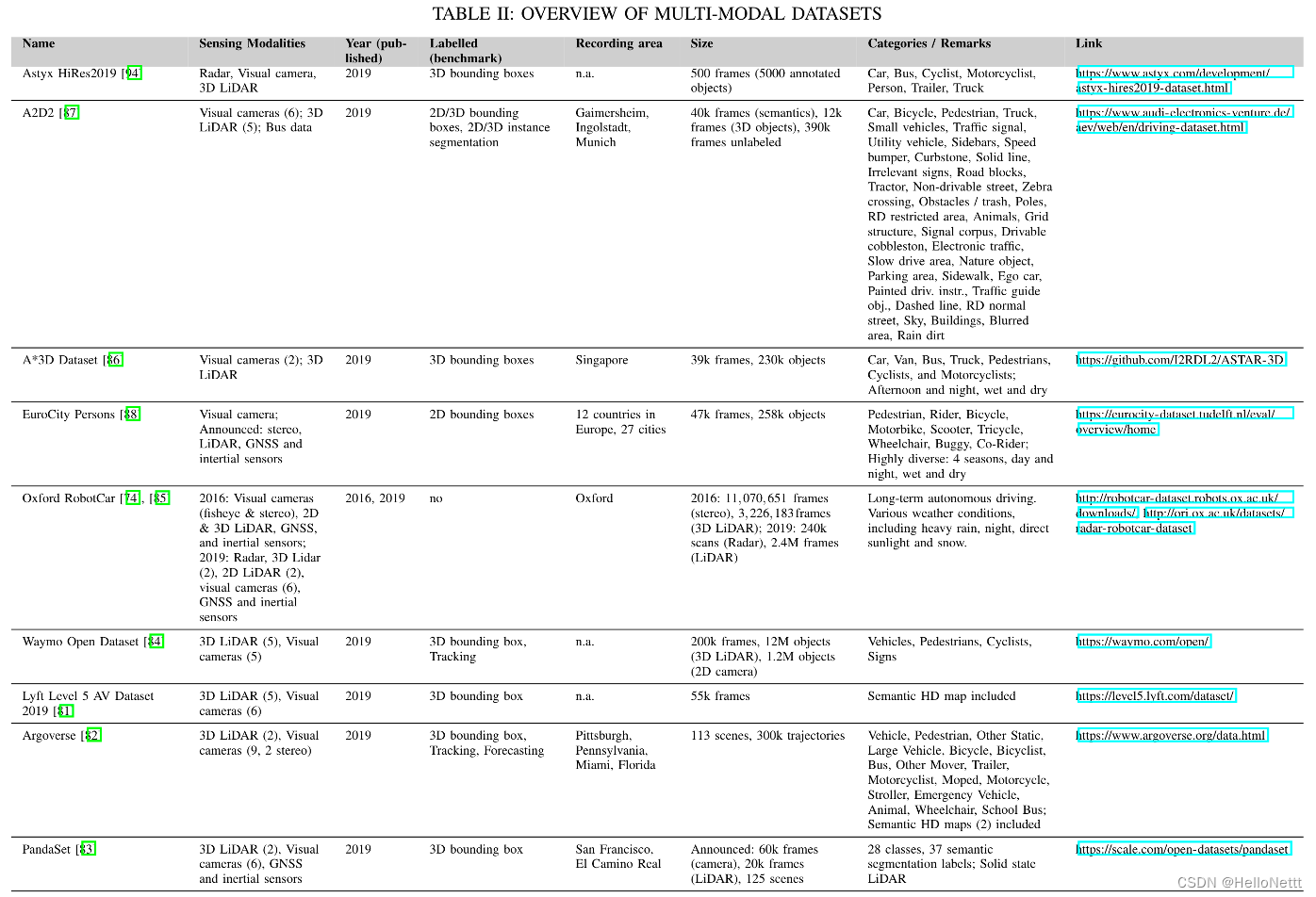
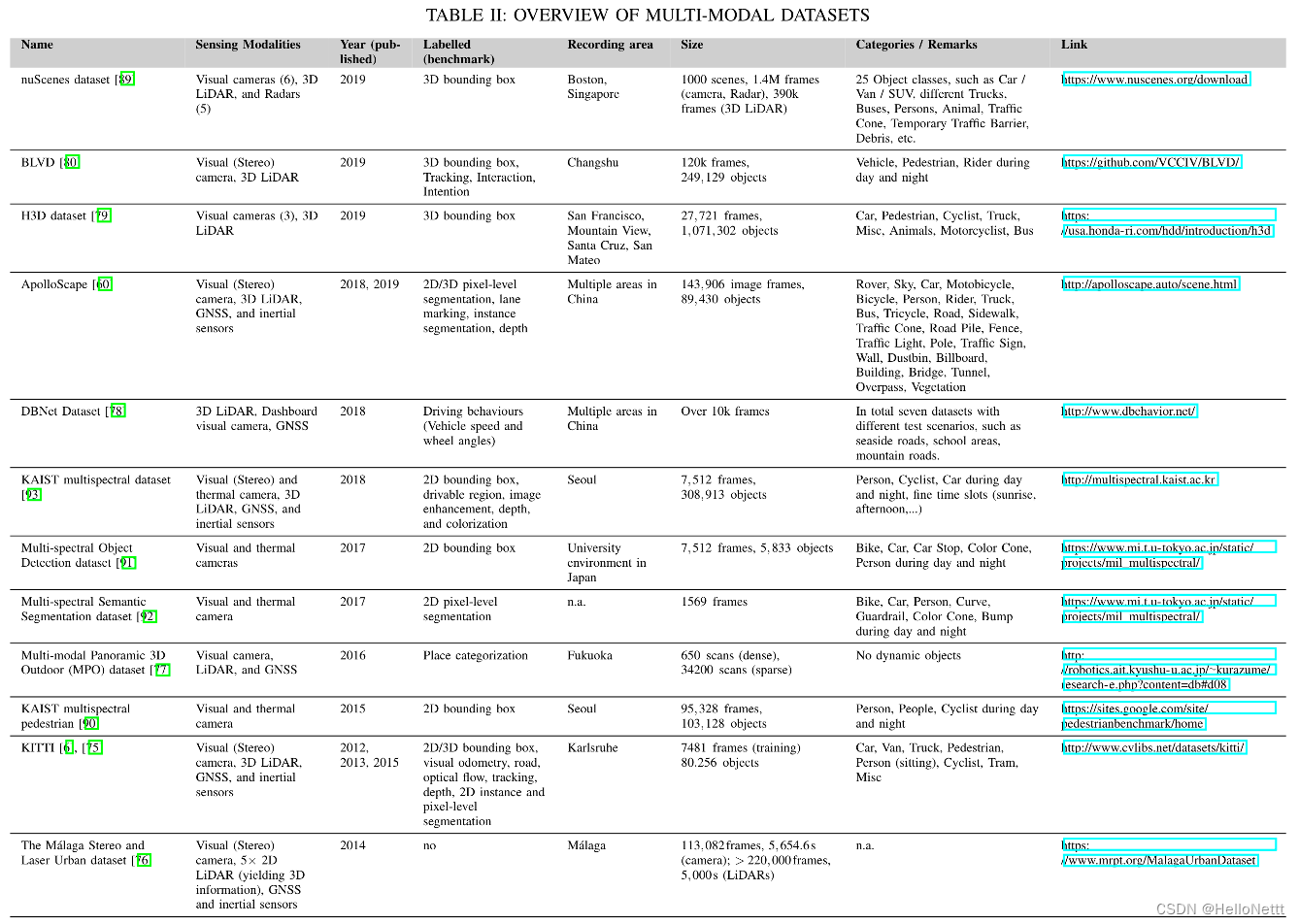
- 视觉和热成像相机:视觉(visual camera)和热成像相机(thermal camera)捕捉到的图像可以提供车辆周围环境的详细纹理信息。视觉相机对光线和天气条件很敏感;热成像相机对白天/夜间的变化更敏感,因为它们能探测到与物体热量有关的红外辐射。然而,这两种类型的相机都不能直接提供深度信息。
- LIDAR(Light Detection And Ranging):以三维点的形式给出周围环境的精确深度信息。LIDAR是主动摄影,它测量以一定频率发射的激光束的反射。激光雷达对不同的照明条件受影响较小,而且比视觉相机更少受到各种天气条件的影响,如雾和雨。典型的激光雷达无法捕捉到物体的精细纹理,且当物体距离较远时,激光雷达的点会变得稀疏。
- Radar(无线电探测和测距):Radar发射被障碍物反射的电磁波,测量信号运行时间,通过多普勒效应估计物体的径向速度、距离和角度。它们在各种光照和天气条件下都很鲁棒,但由于分辨率低,通过雷达对物体进行分类非常具有挑战性。radar在自适应巡航控制和交通拥堵辅助系统中有着广泛的应用。毫米波(mmWave)是一种短波雷达技术。
| 深度语义分割的数据集 | ||
|---|---|---|
| Cityscape | KITTI | Toronto City |
| Mapillary远景 | ApolloScape |
| 专注于分类的像素级语义分割 | 【3】/【4】/【5】 |
|---|---|
| 专注于路端语义分割 | 【6】/【7】 |
| 专注于不同交通参与者的实例级语义分割 | 【8】/【9】/【10】 |
| 融合全局信息的语义分割 | 扩张卷积【11】【12】,多尺度预测【13】,以及添加条件随机场(CRFs)作为后处理步骤【14】 |
| 专注于语义分割的实时性 | 从操作(GFLOPs)和推理速度(fps)两个方面对几种语义分词架构的实时性进行了比较研究【15】 |
1.postman介绍Postman一款非常流行的API调试工具。其实,开发人员用的更多。因为测试人员做接口测试会有更多选择,例如Jmeter、soapUI等。不过,对于开发过程中去调试接口,Postman确实足够的简单方便,而且功能强大。2.下载安装官网地址:https://www.postman.com/下载完成后双击安装吧,安装过程极其简单,无需任何操作3.使用教程这里以百度为例,工具使用简单,填写URL地址即可发送请求,在下方查看响应结果和响应状态码常用方法都有支持请求方法:getpostputdeleteGet、Post、Put与Delete的作用get:请求方法一般是用于数据查询,
Ⅰ软件测试基础一、软件测试基础理论1、软件测试的必要性所有的产品或者服务上线都需要测试2、测试的发展过程3、什么是软件测试找bug,发现缺陷4、测试的定义使用人工或自动的手段来运行或者测试某个系统的过程。目的在于检测它是否满足规定的需求。弄清预期结果和实际结果的差别。5、测试的目的以最小的人力、物力和时间找出软件中潜在的错误和缺陷6、测试的原则28原则:20%的主要功能要重点测(eg:支付宝的支付功能,其他功能都是次要的)80%的错误存在于20%的代码中7、测试标准8、测试的基本要求功能测试性能测试安全性测试兼容性测试易用性测试外观界面测试可靠性测试二、质量模型衡量一个优秀软件的维度①功能性功
ES一、简介1、ElasticStackES技术栈:ElasticSearch:存数据+搜索;QL;Kibana:Web可视化平台,分析。LogStash:日志收集,Log4j:产生日志;log.info(xxx)。。。。使用场景:metrics:指标监控…2、基本概念Index(索引)动词:保存(插入)名词:类似MySQL数据库,给数据Type(类型)已废弃,以前类似MySQL的表现在用索引对数据分类Document(文档)真正要保存的一个JSON数据{name:"tcx"}二、入门实战{"name":"DESKTOP-1TSVGKG","cluster_name":"elasticsear
(本文是网络的宏观的概念铺垫)目录计算机网络背景网络发展认识"协议"网络协议初识协议分层OSI七层模型TCP/IP五层(或四层)模型报头以太网碰撞路由器IP地址和MAC地址IP地址与MAC地址总结IP地址MAC地址计算机网络背景网络发展 是最开始先有的计算机,计算机后来因为多项技术的水平升高,逐渐的计算机变的小型化、高效化。后来因为计算机其本身的计算能力比较的快速:独立模式:计算机之间相互独立。 如:有三个人,每个人做的不同的事物,但是是需要协作的完成。 而这三个人所做的事是需要进行协作的,然而刚开始因为每一台计算机之间都是互相独立的。所以前面的人处理完了就需要将数据
我刚刚开始按照包括AlexOtt在内的各种指南设置cedet。这是我的init文件中目前的内容。(require'cedet)(semantic-load-enable-code-helpers);;imenubreaksifIdon'tenablethis(global-semantic-highlight-func-mode1)(global-semantic-tag-folding-mode)我非常喜欢代码折叠,因为语义比hideshow等包更了解代码我想对ruby进行相同的折叠。我知道cedet还可以做其他事情,但我现在只是试一试。所以我在contrib/文件夹中看到了wi
gemspec语义版本控制运算符~>(又名twiddle-wakka,又名pessimistic运算符)允许限制gem版本但允许进行一些升级。我经常看到它可以读作:"~>3.1"=>"Anyversion3.x,butatleast3.1""~>3.1.1"=>"Anyversion3.1.x,butatleast3.1.1"但是有了一个数字,这条规则就失效了:"~>3"=>"Anyversionx,butatleast3"*NOTTRUE!*"~>3"=>"Anyversion3.x"*True.Butwhy?*如果我想要“任何版本3.x”,我可以只使用“~>3.0”,这是一致的。就
我正在使用RABL输出Sunspot/SOLR结果集,搜索结果对象由多种模型类型组成。目前在rablView中我有:objectfalsechild@search.results=>:resultsdoattribute:id,:resource,:upccodeattribute:display_description=>:descriptioncode:start_datedo|r|r.utc_start_date.to_iendcode:end_datedo|r|r.utc_end_date.to_iendendchild@search=>:statsdoattribute:to
文章目录概念索引相关操作创建索引更新副本查看索引删除索引索引的打开与关闭收缩索引索引别名查询索引别名文档相关操作新建文档查询文档更新文档删除文档映射相关操作查询文档映射创建静态映射创建索引并添加映射概念es中有三个概念要清楚,分别为索引、映射和文档(不用死记硬背,大概有个印象就可以)索引可理解为MySQL数据库;映射可理解为MySQL的表结构;文档可理解为MySQL表中的每行数据静态映射和动态映射上面已经介绍了,映射可理解为MySQL的表结构,在MySQL中,向表中插入数据是需要先创建表结构的;但在es中不必这样,可以直接插入文档,es可以根据插入的文档(数据),动态的创建映射(表结构),这就
目录1关系运算符2运算符优先级3关系表达式的书写代码实例:下面是面试中可能遇到的问题:1关系运算符C++中有6个关系运算符,用于比较两个值的大小关系,它们分别是:运算符描述==等于!=不等于小于>大于小于等于>=大于等于这些运算符返回一个布尔值,即true或false。例如,当x等于y时,x==y的结果为true,否则结果为false。2运算符优先级在C++中,关系运算符的优先级高于赋值运算符,但低于算术运算符。以下是关系运算符的优先级,从高到低排列:运算符描述>,,>=,关系运算符==,!=相等性运算符&&逻辑与`如果在表达式中有多个运算符,则按照优先级顺序依次进行运算。3关系表达式的书写在
一.计算机组成原理 这本书利用组合逻辑、同步时序逻辑电路设计的相关知识,从逻辑门开始逐步构建运算器、存储器、数据通路和控制器,最终集成为完整的CU原型系统,使读者从设计者的角度理解计算机部件构成及运行的基本原理,掌握软硬件协同的概念。 全书共9章,主要内容包括计算机系统概述、数据信息的表示、运算方法与运算器、存储系统、指令系统、中央处理器、指令流水线、总线系统、输入输出系统。1.计算机系统概述1.1计算机发展历程 计算机是一种能够按照事先存储的程序,自动、高速、准确地对相关信息进行处理的电子设备。1946年2月,世界上第一台电子数字计算机ENIAC(ElectronicNum