Voxel代码讲解路线
VoxelMorph官方Github地址:https://github.com/voxelmorph/voxelmorph,本文按照官方的Tutorial提供的路线进行讲解。
原文:Visit the VoxelMorph tutorial to learn about VoxelMorph and Learning-based Registration. Here’s an additional small tutorial on warping annotations together with images, and another on template (atlas) construction with VoxelMorph.
主要分为:
本部分的官方代码地址:https://colab.research.google.com/drive/1V0CutSIfmtgDJg1XIkEnGteJuw0u7qT-#scrollTo=h1KXYz-Nauwn
这一部分主要介绍的是如何使用vxm库里的方法对图像进行变换,代码中的方法是随机生成一个矩阵,然后根据该矩阵对图像进行仿射变换。
环境要求:tensorflow2.4,VoxelMorph
完整代码如下:
# 安装和导包
!pip install voxelmorph
import voxelmorph as vxm
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
# 对输入图像进行适当的预处理
pad_amt = 10
(x_train,_),_ = tf.keras.datasets.mnist.load_data()
# float64占用的内存是float32的两倍,是float16的4倍;比如对于CIFAR10数据集,如果采用float64来表示,需要60000323238/1024**3=1.4G,光把数据集调入内存就需要1.4G;如果采用float32,只需要0.7G,如果采用float16,只需要0.35G左右;占用内存的多少,会对系统运行效率有严重影响;(因此数据集文件都是采用uint8来存在数据,保持文件最小)
im = x_train[0,...].astype('float')/255
# np.pad(需要填充的array,((上,下),(左,右)),mode=constant...),这一步是为了增加边缘,累死padding,作用是防止后面的平移导致其超出范围
im = np.pad(im,((pad_amt,pad_amt),(pad_amt,pad_amt)))
# 手工创建变换矩阵
aff = np.eye(3) # 创建主对角矩阵
aff[:2,:2]+=np.random.randn(2,2)*0.1 # 在上半部分的2*2区域加入随机噪声
aff[:2, 2] = np.random.uniform(-10, 10, (2, )) # 均匀分布,(low,high,size) aff[:2, 2]的尺寸是(2,)
aff_inv = np.linalg.inv(aff)
margin=10
nb_annotations = 5
annotations = [np.random.uniform(margin,f-margin,nb_annotations) for f in im.shape] # 创建两个注释,(48,48)表示两个
annotations = np.stack(annotations,1)
# np.newaxis 的功能是增加新的维度,但是要注意 np.newaxis 放的位置不同,产生的矩阵形状也不同。放在第一个,给行上增加维度,放在最后一个,给列上增加维度
im_keras = im[np.newaxis,...,np.newaxis]
aff_keras = aff[np.newaxis,:2,:]
annotations_keras = annotations[np.newaxis,...]
# 进行仿射变换
im_warped = vxm.layers.SpatialTransformer()([im_keras, aff_keras])
im_warped = im_warped[0, ..., 0]
# get dense field of inverse affine
field_inv = vxm.utils.affine_to_dense_shift(aff_inv[:-1,:], im.shape, shift_center=True)[np.newaxis, ...]
# warp annotations
data = [tf.convert_to_tensor(f, dtype=tf.float32) for f in [annotations_keras, field_inv]]
annotations_warped = vxm.utils.point_spatial_transformer(data)[0, ...].numpy()
# 结果可视化
plt.figure()
# note that x and y need to be flipped due to xy indexing in matplotlib
plt.subplot(1, 2, 1)
plt.imshow(im, cmap='gray')
plt.plot(*[annotations[:, f] for f in [1, 0]], 'o')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(im_warped, cmap='gray')
plt.plot(*[annotations_warped[:, f] for f in [1, 0]], 'o')
plt.axis('off');
!pip install voxelmorph
import voxelmorph as vxm
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
教程中使用的是mnist的数据集,数据集的预处理步骤包括:
# 加载mnist数据集
# 其标准输出应为: (x_train, y_train), (x_test, y_test),但是只需要x_train数据展示,所以其他的丢掉
(x_train,_),_ = tf.keras.datasets.mnist.load_data()
# 灰度归一化,从0-255压缩到0-1
im = x_train[0,...].astype('float')/255
# 边缘填充
# 这一步的目的是,在后面对图像进行变换时,原本的Mnist数据集的28*28在变换后,
# 数字可能会移出图像区域,所以扩大原始数据的大小,也就是空白部分,方便展示变换的效果。
# pad_amt设置为10,及补充的区域为10个pixel
pad_amt = 10
# np.pad(需要填充的array,((上,下),(左,右)),mode=constant...),这一步是为了增加边缘,可以理解为padding
# 原始数据28*28,填补大小,上下左右各10,处理后数据48*48
im = np.pad(im,((pad_amt,pad_amt),(pad_amt,pad_amt)))
数据处理前后效果:


# 手动生成仿射变换矩阵,方便后面affine操作
# 创建主对角矩阵
aff = np.eye(3)
# 在左上半部分的2*2区域加入随机噪声
aff[:2,:2]+=np.random.randn(2,2)*0.1
# 前两行的第三列的内容使用(-10,10)之间的均匀随机采样数字来替换
# np.random.uniform(low,high,size),使用(2,)的原因是aff[:2,2]数组就是一个两行一列的值
aff[:2, 2] = np.random.uniform(-10, 10, (2, ))
# 对上面计算后的矩阵求逆
aff_inv = np.linalg.inv(aff)
# 手动生成annotation变换矩阵,方便后面warp操作
margin=10
nb_annotations = 5
# 创建一个列表,其中包含两个annotations,每个中包含nb_annotations个随机数字,范围在(margin,f-margin)之间
annotations = [np.random.uniform(margin,f-margin,nb_annotations) for f in im.shape]
# np.stack的简单用法在我的notion中有说明:
# https://sandy-property-d5e.notion.site/np-stack-48a69e31be084aa98cd15ce7d093c2ec
annotations = np.stack(annotations,1)
处理后的数据分别为:
aff_inv:
[
1.01
−
3.137
−
7.602
5.857
8.561
3.138
0
0
1
]
\begin{bmatrix} 1.01& -3.137 & -7.602\\ 5.857& 8.561& 3.138\\ 0& 0 &1 \end{bmatrix}
⎣
⎡1.015.8570−3.1378.5610−7.6023.1381⎦
⎤
annotations:
[
23.46
−
3.3
2.34
7.33
6.42
14.34
5.32
37.34
7.14
17.34
]
\begin{bmatrix} 23.46& -3.3\\ 2.34&7.33 \\ 6.42& 14.34\\ 5.32& 37.34\\ 7.14&17.34 \end{bmatrix}
⎣
⎡23.462.346.425.327.14−3.37.3314.3437.3417.34⎦
⎤
# np.newaxis 的功能是增加新的维度。放在第一个,给行上增加维度,放在最后一个,给列上增加维度
im_keras = im[np.newaxis,...,np.newaxis] # (1, 48, 48, 1)
aff_keras = aff[np.newaxis,:2,:] #(1, 2, 3)
annotations_keras = annotations[np.newaxis,...] # (1,5,2)
# warp image
# 调用vxm库里的SpatialTransformer类,([im_keras, aff_keras])放在后面是什么用法暂时还没搞懂
# ([im_keras, aff_keras])分别代表的是图像数据和形变数据,通过空间变换将形变数据作用到图像数据中
im_warped = vxm.layers.SpatialTransformer()([im_keras, aff_keras])
im_warped = im_warped[0, ..., 0] # 取im_warped中的第0行第0列
# 获取取逆操作后的仿射矩阵的密集场Dense field
# 此处的affine_to_dense_shift和官方的教程不同,因为新版的vxm已经更新为此方法,此处已通过Issue询问过开发者
# vxm.utils.affine_to_dense_shift(array,shape,shift_center=True)
# 最后[np.newaxis, ...]的作用等价于field_inv = field_inv[np.newaxis, ...],即给输出的结果的第一个位置增加一个维度
field_inv = vxm.utils.affine_to_dense_shift(aff_inv[:-1,:], im.shape, shift_center=True)[np.newaxis, ...]
# warp annotations
# 我的理解是:annotation是一些随机生成的点,在变换前后的图像中都是存在的
# 其作用是,帮助更明显的看出图像变化的方向和形式(涉及形变、整体移动的方向等信息)
# data为长度为2的列表,存储的分别是annotations_keras, field_inv,且两个都被转换为tf.Tensor形式,用于输入到vxm.utils.point_spatial_transformer中
data = [tf.convert_to_tensor(f, dtype=tf.float32) for f in [annotations_keras, field_inv]]
# 将辅助点和形变场都放入 vxm.utils.point_spatial_transformer,获取辅助点在该形变场下的变换信息
# [0,...]:从[1,5,2]中获取第0维度的信息=>[5,2]
annotations_warped = vxm.utils.point_spatial_transformer(data)[0, ...].numpy()
plt.figure()
# 分别展示初始的图像和生成的辅助点
plt.subplot(1, 2, 1)
plt.imshow(im, cmap='gray')
plt.plot(*[annotations[:, f] for f in [1, 0]], 'o')
plt.axis('off')
# 分别展示变换后的图像和变换后的辅助点
plt.subplot(1, 2, 2)
plt.imshow(im_warped, cmap='gray')
plt.plot(*[annotations_warped[:, f] for f in [1, 0]], 'o')
plt.axis('off');

本部分的官方代码地址:https://colab.research.google.com/drive/1WiqyF7dCdnNBIANEY80Pxw_mVz4fyV-S?usp=sharing#scrollTo=joVczQLTPXMZ
这一部分主要介绍VoxelMorph基于深度学习的配准的实现,主要介绍以下四部分:
# 库的安装和导入
!pip install voxelmorph
import os, sys
import numpy as np
import tensorflow as tf
assert tf.__version__.startswith('2.'), 'This tutorial assumes Tensorflow 2.0+'
import voxelmorph as vxm
import neurite as ne
在这部分代码中,主要介绍2D MNIST数据的配准,在之后会尝试配准2维医学图像数据。如果数据量很小,可以将其加载到内存中,因为这样测试和训练起来更快。但是如果数据量很大的话,则需要按需扫描加载到内存中,这一点会在后续谈到。
# 导入MNIST数据集,需要使用到tensorflow.keras库
from tensorflow.keras.datasets import mnist
# 分别存储训练和测试数据
(x_train_load,y_train_load),(x_test_load,y_test_load) = mnist.load_data()
# 本文以数字5的图像配准为例
digit_sel = 5
# 分别获取下标为5的数据,分别存储为训练和测试集
x_train = x_train_load[y_train_load==digit_sel,...]
y_train = y_train_load[y_train_load==digit_sel]
x_test = x_test_load[y_test_load==digit_sel, ...]
y_test = y_test_load[y_test_load==digit_sel]
# 输出数据的尺寸以供检查
print('shape of x_train:{},y_train:{}'.format(x_train.shape,y_train.shape))
shape of x_train: (5421, 28, 28), y_train: (5421,)
测试/验证集的划分
ML的弯路:把数据只分在训练/测试中往往会导致问题的出现
反复(A)建立一个模型,(B)在训练数据上训练,(C)在测试数据上测试
这样做会导致过拟合(因为你会根据测试数据调整你的算法)。这在深度学习中是一个常见的错误。我们将把 "训练 "分成 "训练/验证 "数据,并把测试集留待以后使用。而只有在最后才会看测试数据。
# 抽出1000个作为验证集
nb_val = 1000
x_val = x_train[-nb_val:,...]
y_val = y_train[-nb_val:]
x_train = x_train[:-nb_val,...]
y_train = y_train[:-nb_val]
可视化数据
# numebr of visualize展示的数据的个数
nb_vis = 5
# nb.random.choice(需要抽取的数组,抽取的个数,是否允许重复)
idx = np.random.choice(x_train.shape[0],nb_vis,replace=False)
# example_digits是一个列表,存储的是分别是随机选择的数字的灰度值的矩阵
example_digits = [f for f in x_train[idx,...]]
# ne.plot.slices工具用来可视化数据
ne.plot.slices(example_digits,cmaps=['gray'],do_colorbars=True);

对数据进行归一化并重新显示:
x_train = x_train.astype('float')/255
x_val = x_val.astype('float')/255
x_test = x_test.astype('float')/255
example_digits = [f for f in x_train[idx,...]]
ne.plot.slices(example_digits,camps=['gray'],do_colorbars=True];

扩展图像
# 从28*28拓展到32*32
# 第一维是图像个数,无需处理,后两维是长度和宽度
pad_amount = ((0,0),(2,2),(2,2))
x_train = np.pad(x_train,pad_amount,'constant')
x_val = np.pad(x_val,pad_amount,'constant')
x_text = np.pad(x_text,pad_amount,'constant')
print('shape of training data', x_train.shape)
shape of training data (4421, 32, 32)
提供参考和浮动图像,配准的目标是找到二者之间的变形矩阵。在基于学习的方法中,VoxelMorph选择两幅图像作为输入(参考和浮动图像,3232的MNIST数据),输出为密集形变场𝜙(3232*2,每个点表示像素的移动信息)。直观来说,密集形变场𝜙提供了两个图片之间的关系,并且告诉我们如何移动浮动图像使得其和参考图像尽可能的拟合。
注意: 配准也包括仿射变换,但是在这里选择忽略掉。
VoxelMorph库中提供了VxmDense模型类用来建立密集变形网络。在之后会介绍这个类,出于教学目的,将从头开始建立这个模型,以展示网络的各个组成部分。首先,抽象vxm.networks.Unet()模型。
# 配置unet输入形状(移动和固定图像的concat)
ndim = 2
unet_input_features = 2
# 输入尺寸,32*32*2,*x_train.shape[1:]表示对(5000,32,32)解包,获取32,32并与2拼接得到(32,32,2)
inshape = (*x_train.shape[1:],unet_input_features)
# 配置unet
nb_features = [
[32,32,32,32],# encode层
[32,32,32,32,32,16] # decoder层
]
# 建立模型,传入参数
unet = vxm.networks.Unet(inshape=inshape,nb_features=nb_features)
查看模型的输入和输出
print("input shape:",unet.input.shape)
print("output shape:",unet.output.shape)
input shape: (None, 32, 32, 2) output shape: (None, 32, 32, 16)
现在需要确保输出为2个features,代表每个voxel的变形情况
体素Voxel,可以理解为体积像素,是三维图像中点的表示方式。与之对应的像素Pixel,是二维图像中点的表示方式。参考:https://www.techtarget.com/whatis/definition/voxel
# 将结果变形成为一个流动场
# 将unet.output(None, 32, 32, 16)输入到二维卷积中,输入channel为2,kernel为3,padding方式为same
disp_tensor = tf.keras.layers.Conv2D(ndim,kernel_size=3,padding='same',name='disp')(unet.output)
# 查看输出形状
print("displacement shape",disp_tensor.shape)
# tf.keras.models.Model 将层分组到具有训练和推理功能的对象中
def_model = tf.keras.models.Model(unet.inputs,disp_tensor)
displacement tensor: (None, 32, 32, 2)
变形层现在可以和UNet模型共享权重,并在def_model中体现
目前已知形变场𝜙是网络的输出,现在需要设计合理的损失函数。
在有监督学习中,具有ground truth,𝜙𝑔𝑡,只需要计算MSE=‖𝜙−𝜙𝑔𝑡‖即可。
而在无监督学习的图像配准中,主要利用的经典配准方法中的损失函数。
在没有监督的情况下,如何知道当前的形变场是否是最优的呢?
为了达到(1)中的结果,需要对浮动图像m进行扭转。也就是使用空间变换网络层spatial transformation network layer,本质上进行的是线性插值。关于空间变换网络的介绍:博客
# 建立空间变换层
spatial_transformer = vxm.layers.SpatialTransformer(name='transformer')
# 从unet输入的数据中提取第一帧
moving_image = tf.expand_dims(unet.input[...,0],axis=-1)
# 根据transformer来对浮动图像进行变形
moved_image_tensor = spatial_transformer([moving_image,disp_tensor])
为了确保浮动图像更接近参考图像,同时为了获取损失的平滑性(2),在输出中加入了二者的结合。
outputs = [moved_image_tensor,disp_tensor]
vxm_model = tf.keras.models.Model(inputs=unet.inouts,outputs=outputs)
上面所建立的模型,是VoxelMorph标准的dense结构网络,包括unet,位移场和最后的空间变换层。但是并不是每次搭建网络都需要这些步骤从头搭建,VoxelMorph库提供了更便捷的搭建方法,也就是VxmDense模型类,下面演示这种方法。
# 使用VxmDense建立网络模型
inshape = x_train.shape[1:]
vxm_model = vxm.networks.VxmDense(inshape,nb_features,int_steps=0)
int_steps=0是一个高级功能的选项,设置为0表示不开启,开启的话就为使用微分同胚功能,这一功能在后续会介绍到。
下面来看一下使用VxmDense生成模型的结构是否正确
print('input shape: ', ', '.join([str(t.shape) for t in vxm_model.inputs]))
print('output shape:', ', '.join([str(t.shape) for t in vxm_model.outputs]))
input shape: (None, 32, 32, 1), (None, 32, 32, 1)
output shape: (None, 32, 32, 1), (None, 32, 32, 2)
现在已经学会了如何快速的搭建网络。下面定义损失,在keras中,需要为每次的输出定义损失。第一个损失是简单的计算扭曲图像𝑚∘𝜙 的MSE。第二个损失函数,教程中选择位移的空间梯度作为损失。
# voxelmorph拥有内置的多个损失函数
losses = [vxm.losses.MSE().loss, vxm.losses.Grad('l2').loss]
# # 通常,会用超参数来平衡两种损失
lambda_param = 0.05
loss_weights = [1, lambda_param]
最后,开始编译模型,在模型的变异过程中,需要定义优化器和损失以及权重。
vxm_model.compile(optimizer='Adam', loss=losses, loss_weights=loss_weights)
5. 训练模型
为了训练,我们需要确保数据的格式是正确的,并且要满足keras的fed网络的要求。这也就需要数据在一个大的数组中或者是在model.fit_generator函数中,也就需要我们自定义python生成器。
下面定义一个简单的生成器作为演示,加载的是MINST数据。
def vxm_data_generator(x_data, batch_size=32):
"""
生成器接收数据尺寸为[N,H,W],输出数据传递给自定义的voxel模型。需要注意的是,每次的输入和输出需要提供的数据类型为numpy。
inputs: 浮动图像 [bs, H, W, 1], 固定图像 [bs, H, W, 1]
outputs: 移动后的浮动图像 [bs, H, W, 1], 0梯度模版 [bs, H, W, 2]
"""
#初步确定尺寸
vol_shape = x_data.shape[1:] # extract data shape
ndims = len(vol_shape)
# 准备一个为0的列表,尺寸和图像的输入尺寸相同
zero_phi = np.zeros([batch_size, *vol_shape, ndims])
while True:
# 准备输入数据:
# 图像的尺寸为: [batch_size, H, W, 1]
# 分别随机参考和浮动图像的下标,随机数量为batchsize
idx1 = np.random.randint(0, x_data.shape[0], size=batch_size)
moving_images = x_data[idx1, ..., np.newaxis]
idx2 = np.random.randint(0, x_data.shape[0], size=batch_size)
fixed_images = x_data[idx2, ..., np.newaxis]
inputs = [moving_images, fixed_images]
# 准备输出(移动后的移动图像)
# 当然,在当前步骤中是没有这个图像的,但是需要作为对比来计算损失(移动后的图像和固定图像之间的)
# 此外,还希望给位移场增加惩罚项。
outputs = [fixed_images, zero_phi]
yield (inputs, outputs)
# 测试编写的生成器
train_generator = vxm_data_generator(x_train)
in_sample, out_sample = next(train_generator)
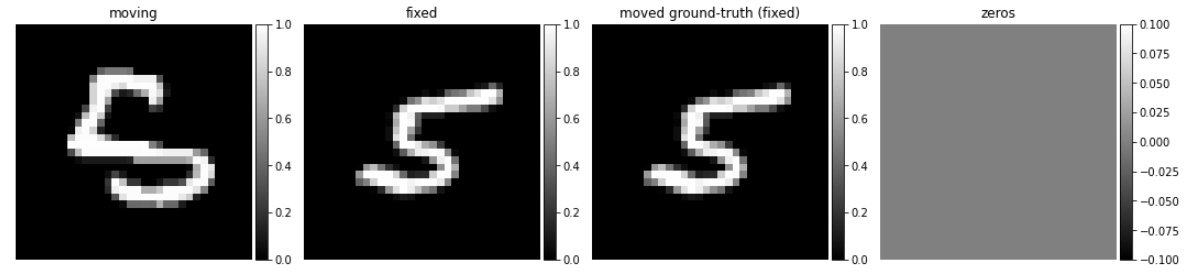
# 可视化
images = [img[0, :, :, 0] for img in in_sample + out_sample]
titles = ['moving', 'fixed', 'moved ground-truth (fixed)', 'zeros']
ne.plot.slices(images, titles=titles, cmaps=['gray'], do_colorbars=True);
开始训练
nb_epochs = 10
steps_per_epoch = 100
hist = vxm_model.fit_generator(train_generator, epochs=nb_epochs, steps_per_epoch=steps_per_epoch, verbose=2);
Epoch 1/10
100/100 - 32s - loss: 0.0566 - transformer_loss: 0.0537 - flow_loss: 0.0572
Epoch 2/10
100/100 - 30s - loss: 0.0250 - transformer_loss: 0.0196 - flow_loss: 0.1092
Epoch 3/10
100/100 - 30s - loss: 0.0194 - transformer_loss: 0.0141 - flow_loss: 0.1053
Epoch 4/10
100/100 - 30s - loss: 0.0170 - transformer_loss: 0.0119 - flow_loss: 0.1021
Epoch 5/10
100/100 - 30s - loss: 0.0150 - transformer_loss: 0.0102 - flow_loss: 0.0963
Epoch 6/10
100/100 - 30s - loss: 0.0141 - transformer_loss: 0.0093 - flow_loss: 0.0950
Epoch 7/10
100/100 - 30s - loss: 0.0134 - transformer_loss: 0.0087 - flow_loss: 0.0929
Epoch 8/10
100/100 - 30s - loss: 0.0126 - transformer_loss: 0.0081 - flow_loss: 0.0901
Epoch 9/10
100/100 - 30s - loss: 0.0116 - transformer_loss: 0.0072 - flow_loss: 0.0877
Epoch 10/10
100/100 - 30s - loss: 0.0116 - transformer_loss: 0.0072 - flow_loss: 0.0870
可视化损失函数曲线
import matplotlib.pyplot as plt
def plot_history(hist, loss_name='loss'):
# Simple function to plot training history.
plt.figure()
plt.plot(hist.epoch, hist.history[loss_name], '.-')
plt.ylabel('loss')
plt.xlabel('epoch')
plt.show()
plot_history(hist)

6. 配准
# 使用生成器加载验证集数据
val_generator = vxm_data_generator(x_val, batch_size = 1)
val_input, _ = next(val_generator)
# 使用predict函数实现配准
val_pred = vxm_model.predict(val_input)
# 输出计算时间
%timeit vxm_model.predict(val_input)
10 loops, best of 3: 41.9 ms per loop
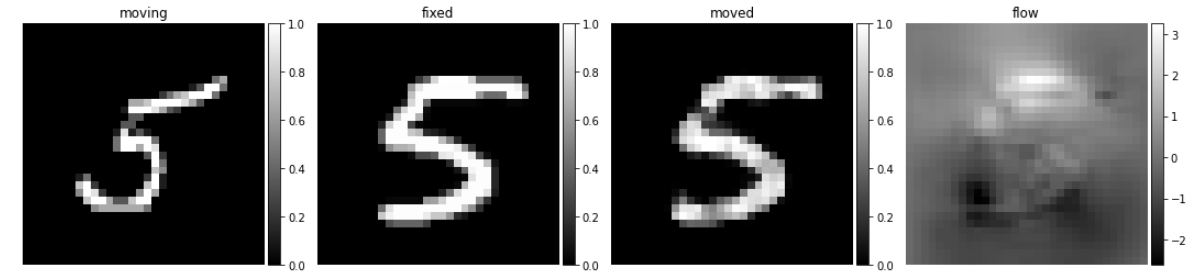
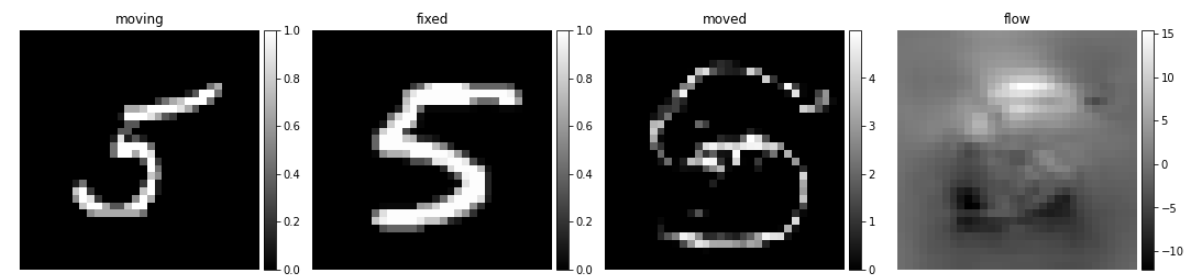
可视化配准结果
# visualize
images = [img[0, :, :, 0] for img in val_input + val_pred]
titles = ['moving', 'fixed', 'moved', 'flow']
ne.plot.slices(images, titles=titles, cmaps=['gray'], do_colorbars=True);
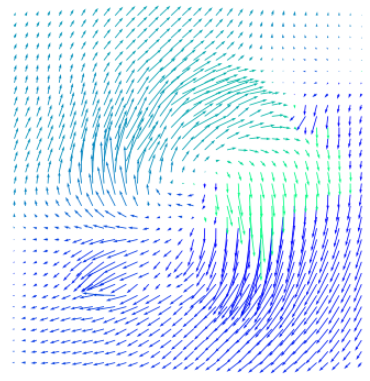
# 可视化密集场
ne.plot.flow([val_pred[1].squeeze()], width=5);
7. 一般化上述的方法和流程
使用训练好的模型预测数字7的配准结果,应该如何使用,效果如何?
# 提取数字7,归一化,补充为32*32
x_sevens = x_train_load[y_train_load==7, ...].astype('float') / 255
x_sevens = np.pad(x_sevens, pad_amount, 'constant')
# 配准预测
seven_generator = vxm_data_generator(x_sevens, batch_size=1)
seven_sample, _ = next(seven_generator)
seven_pred = vxm_model.predict(seven_sample)
# 可视化
images = [img[0, :, :, 0] for img in seven_sample + seven_pred]
titles = ['moving', 'fixed', 'moved', 'flow']
ne.plot.slices(images, titles=titles, cmaps=['gray'], do_colorbars=True);
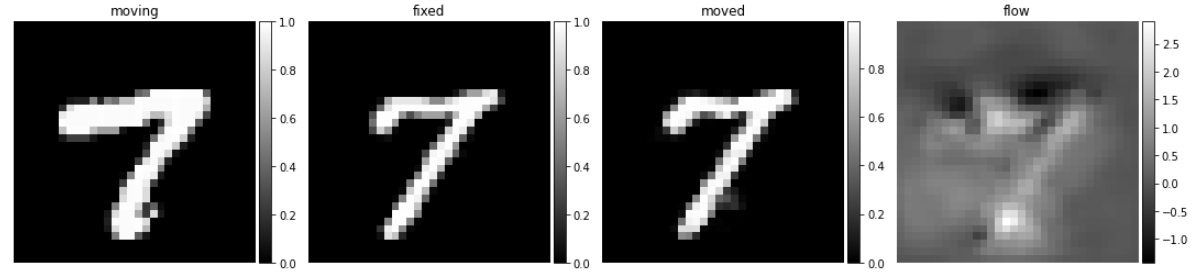
可以看到使用数字7也有不错的配准效果,究其原因是数字5存在部分的特征是和7相同的,也就是网络可以适配数字7的配准,但是对数字5的输入图像进行变形,增加一个权重,效果如何呢?
factor = 5
val_pred = vxm_model.predict([f * factor for f in val_input])
可视化
images = [img[0, :, :, 0] for img in val_input + val_pred]
titles = ['moving', 'fixed', 'moved', 'flow']
ne.plot.slices(images, titles=titles, cmaps=['gray'], do_colorbars=True);
这样效果就会差很多,主要是因为网路从没见过这样的数据。
# 下载MRI数据集
!wget https://surfer.nmr.mgh.harvard.edu/pub/data/voxelmorph/tutorial_data.tar.gz -O data.tar.gz
!tar -xzvf data.tar.gz
# 加载并分类数据集
npz = np.load('tutorial_data.npz')
x_train = npz['train']
x_val = npz['validate']
# 208个体数据的尺寸为160*192
vol_shape = x_train.shape[1:]
print('train shape:', x_train.shape)
train shape: (208, 192, 160)
可视化部分数据
nb_vis = 5
idx = np.random.randint(0, x_train.shape[0], [5,])
example_digits = [f for f in x_train[idx, ...]]
# 可视化
ne.plot.slices(example_digits, cmaps=['gray'], do_colorbars=True);

vxm_model = vxm.networks.VxmDense(vol_shape, nb_features, int_steps=0)
# 定义损失和损失权重
losses = ['mse', vxm.losses.Grad('l2').loss]
loss_weights = [1, 0.01]
# 编译网络
vxm_model.compile(optimizer=tf.keras.optimizers.Adam(lr=1e-4), loss=losses, loss_weights=loss_weights)
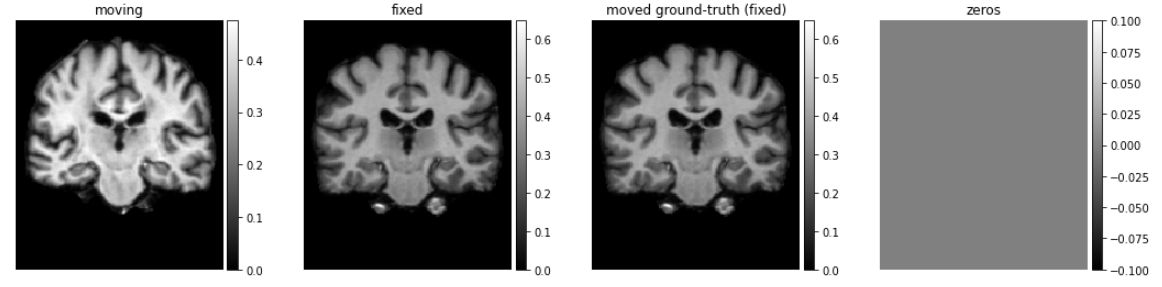
# 幸运的是,这个数据和MNIST数据可以共用一个生成器,可以直接调用
train_generator = vxm_data_generator(x_train, batch_size=8)
in_sample, out_sample = next(train_generator)
# 可视化
images = [img[0, :, :, 0] for img in in_sample + out_sample]
titles = ['moving', 'fixed', 'moved ground-truth (fixed)', 'zeros']
ne.plot.slices(images, titles=titles, cmaps=['gray'], do_colorbars=True);
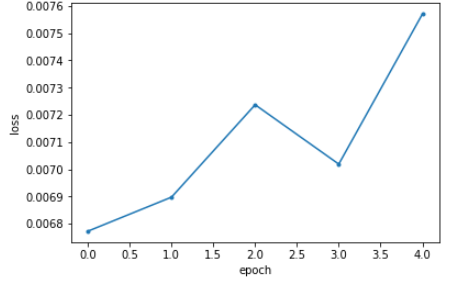
开始训练网络
hist = vxm_model.fit_generator(train_generator, epochs=5, steps_per_epoch=5, verbose=2);
Epoch 1/5
5/5 - 13s - loss: 0.0068 - transformer_loss: 0.0068 - flow_loss: 9.9954e-08
Epoch 2/5
5/5 - 10s - loss: 0.0069 - transformer_loss: 0.0069 - flow_loss: 1.1938e-06
Epoch 3/5
5/5 - 10s - loss: 0.0072 - transformer_loss: 0.0072 - flow_loss: 6.1821e-06
Epoch 4/5
5/5 - 10s - loss: 0.0070 - transformer_loss: 0.0070 - flow_loss: 2.6120e-05
Epoch 5/5
5/5 - 10s - loss: 0.0076 - transformer_loss: 0.0076 - flow_loss: 7.4557e-05
画出训练曲线图
plot_history(hist)
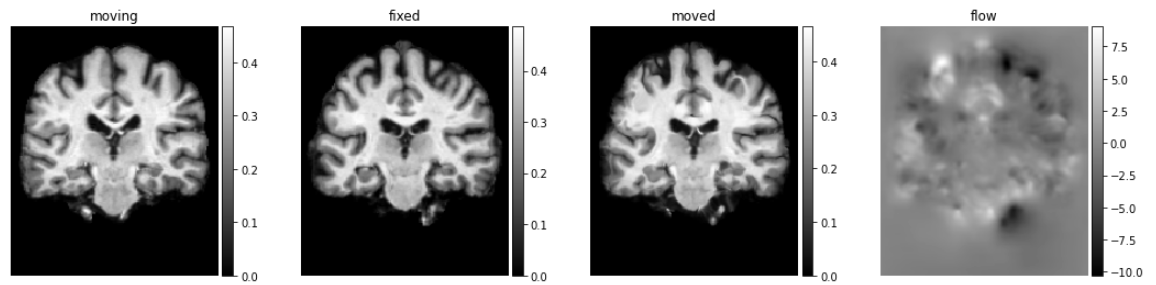
出于时间成本,加载已经训练好200次的预训练模型。
vxm_model.load_weights('brain_2d_smooth.h5')
# 使用生成器加载验证集
val_generator = vxm_data_generator(x_val, batch_size = 1)
val_input, _ = next(val_generator)
# 预测
val_pred = vxm_model.predict(val_input)
# 可视化
images = [img[0, :, :, 0] for img in val_input + val_pred]
titles = ['moving', 'fixed', 'moved', 'flow']
ne.plot.slices(images, titles=titles, cmaps=['gray'], do_colorbars=True);
可视化变形场
flow = val_pred[1].squeeze()[::3,::3]
ne.plot.flow([flow], width=5);

3. 评价
分别对比使用MSE+smothness和MSE作为损失函数的网络学习效果。
# 使用 MSE + smoothness 损失
vxm_model.load_weights('brain_2d_smooth.h5')
our_val_pred = vxm_model.predict(val_input)
# 使用MSE损失
vxm_model.load_weights('brain_2d_no_smooth.h5')
mse_val_pred = vxm_model.predict(val_input)
# 分别可视化MSE+smothness和MSE的预测结果
images = [img[0, ..., 0] for img in [val_input[1], *our_val_pred]]
titles = ['fixed', 'MSE + smoothness', 'flow']
ne.plot.slices(images, titles=titles, cmaps=['gray'], do_colorbars=True);
images = [img[0, ..., 0] for img in [val_input[1], *mse_val_pred]]
titles = ['fixed', 'MSE only', 'flow']
ne.plot.slices(images, titles=titles, cmaps=['gray'], do_colorbars=True);
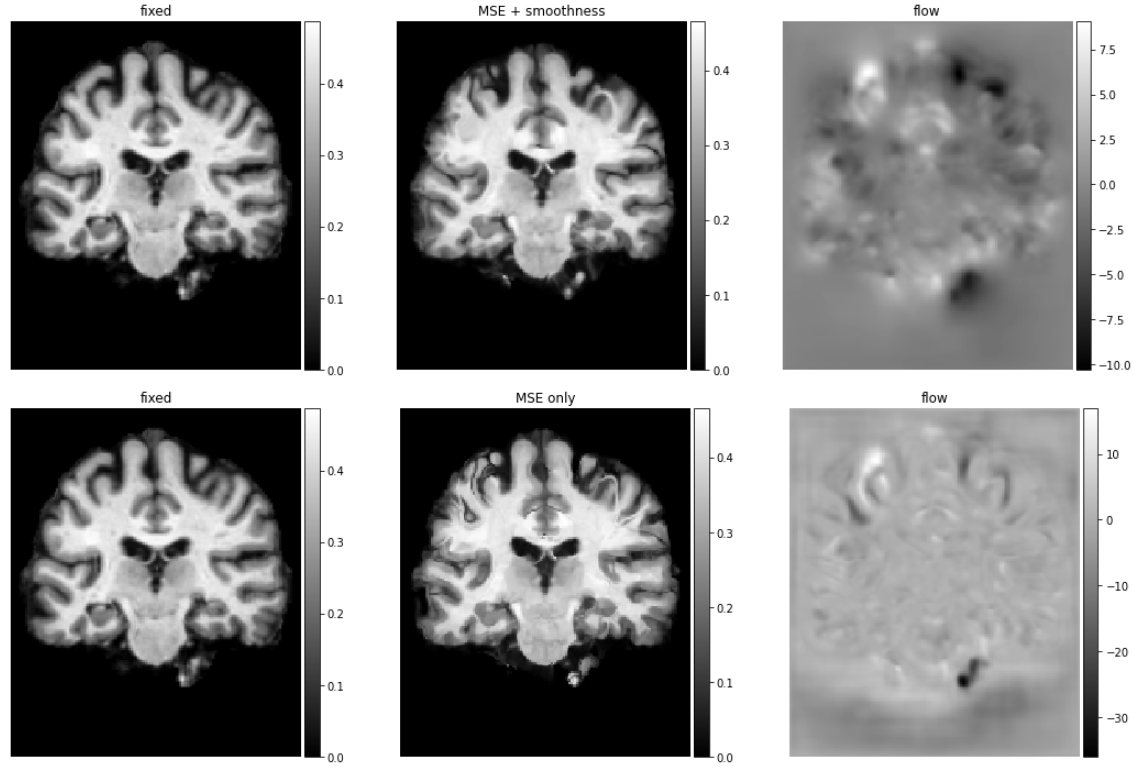
ne.plot.flow([img[1].squeeze()[::3, ::3] for img in [our_val_pred, mse_val_pred]], width=10);

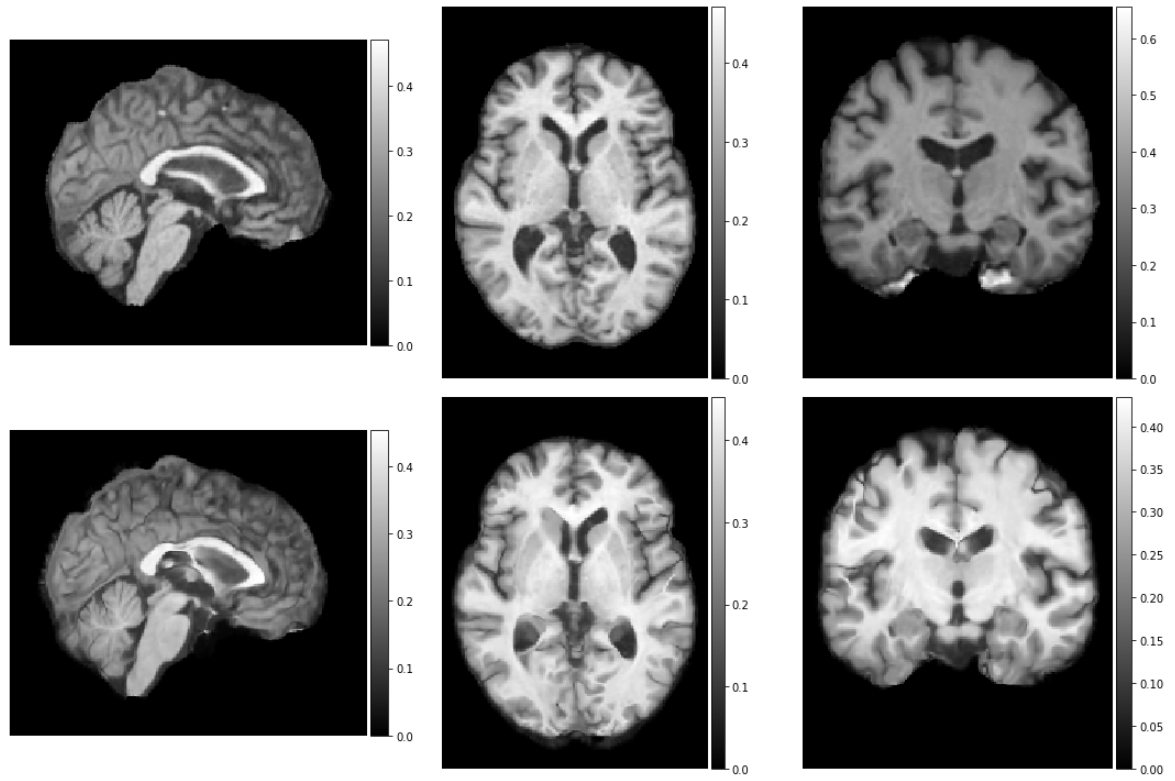
最后,介绍一下3D数据下的模型建立。
由于模型和数据的大小,在教程的短暂实验中,无法展示模型的训练。作为替代,假设模型已经经过训练。可以自行尝试训练,步骤和2D数据基本相似。
1. 模型的建立
# 3D数据的尺寸为160,192,224
vol_shape = (160, 192, 224)
nb_features = [
[16, 32, 32, 32],
[32, 32, 32, 32, 32, 16, 16]
]
# build vxm network
vxm_model = vxm.networks.VxmDense(vol_shape, nb_features, int_steps=0);
2. 划分验证集
# 准备验证集
# seg数据集用于后面将分割数据作为辅助数据帮助网络训练的演示
val_volume_1 = np.load('subj1.npz')['vol']
seg_volume_1 = np.load('subj1.npz')['seg']
val_volume_2 = np.load('subj2.npz')['vol']
seg_volume_2 = np.load('subj2.npz')['seg']
val_input = [
# 两个尺寸均为[1,160,192,224,1]
val_volume_1[np.newaxis, ..., np.newaxis],
val_volume_2[np.newaxis, ..., np.newaxis]
]
# 加载之前训练好的3D模型,因为数据太大,在教程中不演示训练过程
vxm_model.load_weights('brain_3d.h5')
# 开始配准
val_pred = vxm_model.predict(val_input);
moved_pred = val_pred[0].squeeze()
pred_warp = val_pred[1]
mid_slices_fixed = [np.take(val_volume_2, vol_shape[d]//2, axis=d) for d in range(3)]
mid_slices_fixed[1] = np.rot90(mid_slices_fixed[1], 1)
mid_slices_fixed[2] = np.rot90(mid_slices_fixed[2], -1)
mid_slices_pred = [np.take(moved_pred, vol_shape[d]//2, axis=d) for d in range(3)]
mid_slices_pred[1] = np.rot90(mid_slices_pred[1], 1)
mid_slices_pred[2] = np.rot90(mid_slices_pred[2], -1)
ne.plot.slices(mid_slices_fixed + mid_slices_pred, cmaps=['gray'], do_colorbars=True, grid=[2,3]);
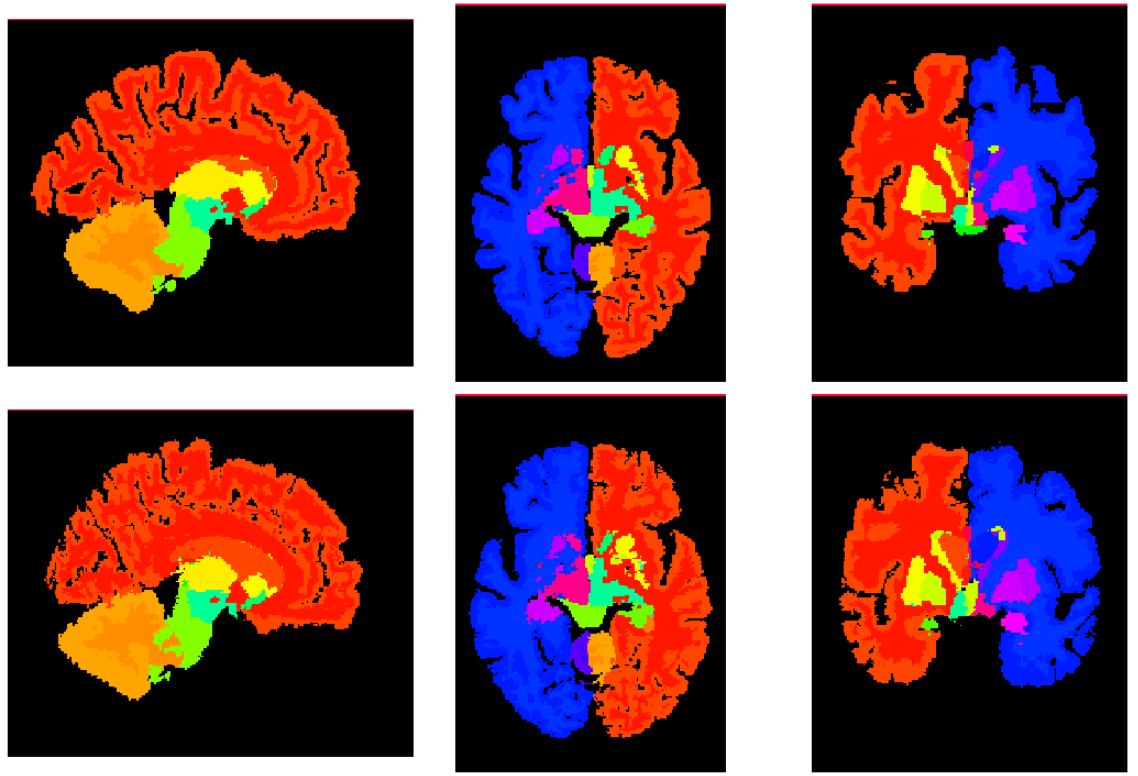
现在看一下分割数据的使用,在使用之前,需要对分割数据进行扭曲。
warp_model = vxm.networks.Transform(vol_shape,interp_method='nearest')
warped_seg = warp_model.predict([seg_volume_1[np.newaxis,...,np.newaxis], pred_warp])
下面需要准备一个色彩图
from pystrum.pytools.plot import jitter
import matplotlib
[ccmap, scrambled_cmap] = jitter(255, nargout=2)
scrambled_cmap[0, :] = np.array([0, 0, 0, 1])
ccmap = matplotlib.colors.ListedColormap(scrambled_cmap)
可视化分割的数据
mid_slices_fixed = [np.take(seg_volume_1, vol_shape[d]//1.8, axis=d) for d in range(3)]
mid_slices_fixed[1] = np.rot90(mid_slices_fixed[1], 1)
mid_slices_fixed[2] = np.rot90(mid_slices_fixed[2], -1)
mid_slices_pred = [np.take(warped_seg.squeeze(), vol_shape[d]//1.8, axis=d) for d in range(3)]
mid_slices_pred[1] = np.rot90(mid_slices_pred[1], 1)
mid_slices_pred[2] = np.rot90(mid_slices_pred[2], -1)
slices = mid_slices_fixed + mid_slices_pred
for si, slc in enumerate(slices):
slices[si][0] = 255
ne.plot.slices(slices, cmaps = [ccmap], grid=[2,3]);
查看运行时间
%timeit vxm_model.predict(val_input)
1 loop, best of 3: 37.1 s per loop
在测试中,一次完整的3D体数据运行需要10s,而对于传统方法则需要花费几个小时。
如何在buildr项目中使用Ruby?我在很多不同的项目中使用过Ruby、JRuby、Java和Clojure。我目前正在使用我的标准Ruby开发一个模拟应用程序,我想尝试使用Clojure后端(我确实喜欢功能代码)以及JRubygui和测试套件。我还可以看到在未来的不同项目中使用Scala作为后端。我想我要为我的项目尝试一下buildr(http://buildr.apache.org/),但我注意到buildr似乎没有设置为在项目中使用JRuby代码本身!这看起来有点傻,因为该工具旨在统一通用的JVM语言并且是在ruby中构建的。除了将输出的jar包含在一个独特的、仅限ruby
在rails源中:https://github.com/rails/rails/blob/master/activesupport/lib/active_support/lazy_load_hooks.rb可以看到以下内容@load_hooks=Hash.new{|h,k|h[k]=[]}在IRB中,它只是初始化一个空哈希。和做有什么区别@load_hooks=Hash.new 最佳答案 查看rubydocumentationforHashnew→new_hashclicktotogglesourcenew(obj)→new_has
我的主要目标是能够完全理解我正在使用的库/gem。我尝试在Github上从头到尾阅读源代码,但这真的很难。我认为更有趣、更温和的踏脚石就是在使用时阅读每个库/gem方法的源代码。例如,我想知道RubyonRails中的redirect_to方法是如何工作的:如何查找redirect_to方法的源代码?我知道在pry中我可以执行类似show-methodmethod的操作,但我如何才能对Rails框架中的方法执行此操作?您对我如何更好地理解Gem及其API有什么建议吗?仅仅阅读源代码似乎真的很难,尤其是对于框架。谢谢! 最佳答案 Ru
我的假设是moduleAmoduleBendend和moduleA::Bend是一样的。我能够从thisblog找到解决方案,thisSOthread和andthisSOthread.为什么以及什么时候应该更喜欢紧凑语法A::B而不是另一个,因为它显然有一个缺点?我有一种直觉,它可能与性能有关,因为在更多命名空间中查找常量需要更多计算。但是我无法通过对普通类进行基准测试来验证这一点。 最佳答案 这两种写作方法经常被混淆。首先要说的是,据我所知,没有可衡量的性能差异。(在下面的书面示例中不断查找)最明显的区别,可能也是最著名的,是你的
几个月前,我读了一篇关于rubygem的博客文章,它可以通过阅读代码本身来确定编程语言。对于我的生活,我不记得博客或gem的名称。谷歌搜索“ruby编程语言猜测”及其变体也无济于事。有人碰巧知道相关gem的名称吗? 最佳答案 是这个吗:http://github.com/chrislo/sourceclassifier/tree/master 关于ruby-寻找通过阅读代码确定编程语言的rubygem?,我们在StackOverflow上找到一个类似的问题:
我目前正在使用以下方法获取页面的源代码:Net::HTTP.get(URI.parse(page.url))我还想获取HTTP状态,而无需发出第二个请求。有没有办法用另一种方法做到这一点?我一直在查看文档,但似乎找不到我要找的东西。 最佳答案 在我看来,除非您需要一些真正的低级访问或控制,否则最好使用Ruby的内置Open::URI模块:require'open-uri'io=open('http://www.example.org/')#=>#body=io.read[0,50]#=>"["200","OK"]io.base_ur
我有带有Logo图像的公司模型has_attached_file:logo我用他们的Logo创建了许多公司。现在,我需要添加新样式has_attached_file:logo,:styles=>{:small=>"30x15>",:medium=>"155x85>"}我是否应该重新上传所有旧数据以重新生成新样式?我不这么认为……或者有什么rake任务可以重新生成样式吗? 最佳答案 参见Thumbnail-Generation.如果rake任务不适合你,你应该能够在控制台中使用一个片段来调用重新处理!关于相关公司
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
前言作为一名程序员,自己的本质工作就是做程序开发,那么程序开发的时候最直接的体现就是代码,检验一个程序员技术水平的一个核心环节就是开发时候的代码能力。众所周知,程序开发的水平提升是一个循序渐进的过程,每一位程序员都是从“菜鸟”变成“大神”的,所以程序员在程序开发过程中的代码能力也是根据平时开发中的业务实践来积累和提升的。提高代码能力核心要素程序员要想提高自身代码能力,尤其是新晋程序员的代码能力有很大的提升空间的时候,需要针对性的去提高自己的代码能力。提高代码能力其实有几个比较关键的点,只要把握住这些方面,就能很好的、快速的提高自己的一部分代码能力。1、多去阅读开源项目,如有机会可以亲自参与开源
嗨~大家好,这里是可莉!今天给大家带来的是7个C语言的经典基础代码~那一起往下看下去把【程序一】打印100到200之间的素数#includeintmain(){ inti; for(i=100;i 【程序二】输出乘法口诀表#includeintmain(){inti;for(i=1;i 【程序三】判断1000年---2000年之间的闰年#includeintmain(){intyear;for(year=1000;year 【程序四】给定两个整形变量的值,将两个值的内容进行交换。这里提供两种方法来进行交换,第一种为创建临时变量来进行交换,第二种是不创建临时变量而直接进行交换。1.创建临时变量来