平台:ubuntu 20.04、ROS
在ubuntu平台搭建多旋翼无人机可视化仿真环境,并使用自定义的六旋翼无人机模型,进行SITL仿真。
无人机:自定义六旋翼
固件:APM/PX4
参考:添加链接描述

参考:APM官网
git clone https://github.com/SwiftGust/ardupilot_gazebo
cd ardupilot_gazebo
mkdir build
cd build
cmake ..
make -j4
sudo make install
设置环境变量
source /usr/share/gazebo/setup.sh
export GAZEBO_MODEL_PATH=~/ardupilot_gazebo/models:${GAZEBO_MODEL_PATH}
export GAZEBO_MODEL_PATH=~/ardupilot_gazebo/models_gazebo:${GAZEBO_MODEL_PATH}
export GAZEBO_RESOURCE_PATH=~/ardupilot_gazebo/worlds:${GAZEBO_RESOURCE_PATH}
export GAZEBO_PLUGIN_PATH=~/ardupilot_gazebo/build:${GAZEBO_PLUGIN_PATH}
最后得到这两个文件夹

1、gazebo --verbose iris_ardupilot.world
2、
cd ~/ardupilot/ArduCopter
../Tools/autotest/sim_vehicle.py -f gazebo-iris --console --map
可以正常打开则说明环境搭建成功。
安装SolidWorks
自己画一个无人机,过程略过
安装SolidWorks的sw_urdf_exporter插件 下载地址
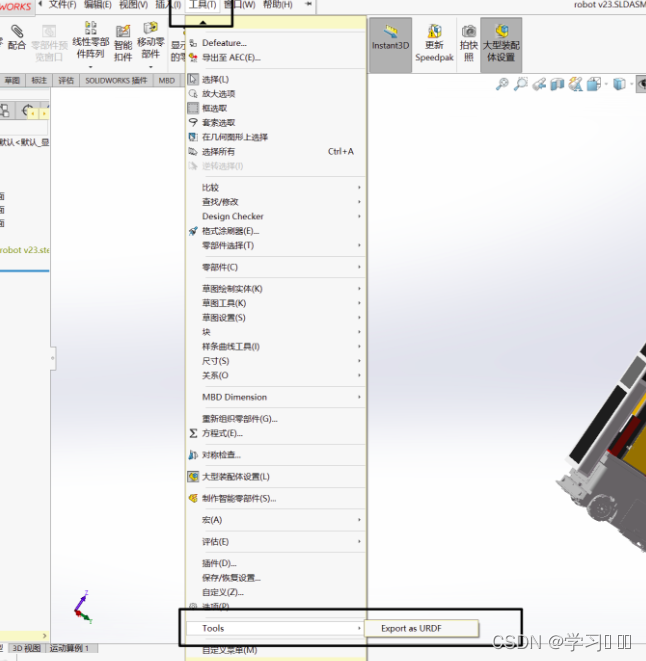
重点!!!
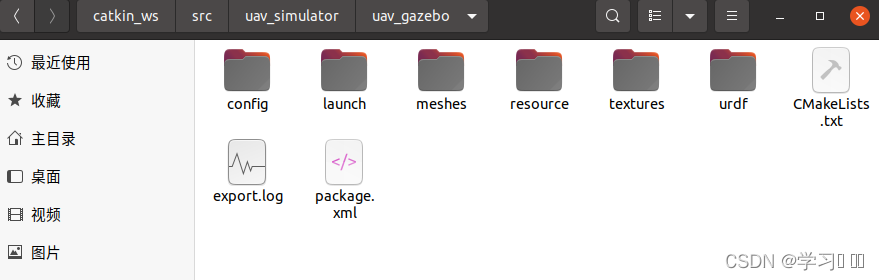
导出无人机模型得到一个文件夹
包括: config、launch、meshes、textures、urdf、CMakeLists.txt、export.log、package.xml
///
打包压缩到ubuntu系统下。
安装rotors 链接
参考 https://blog.csdn.net/qq_37680545/article/details/123213054
在src文件夹内创建uav_simulator包,将压缩包解压到文件夹里
cd 到根目录,catkin_make一下。
运行source bash后
roslaunch uav_gazebo gazebo.launch
可以看到模型
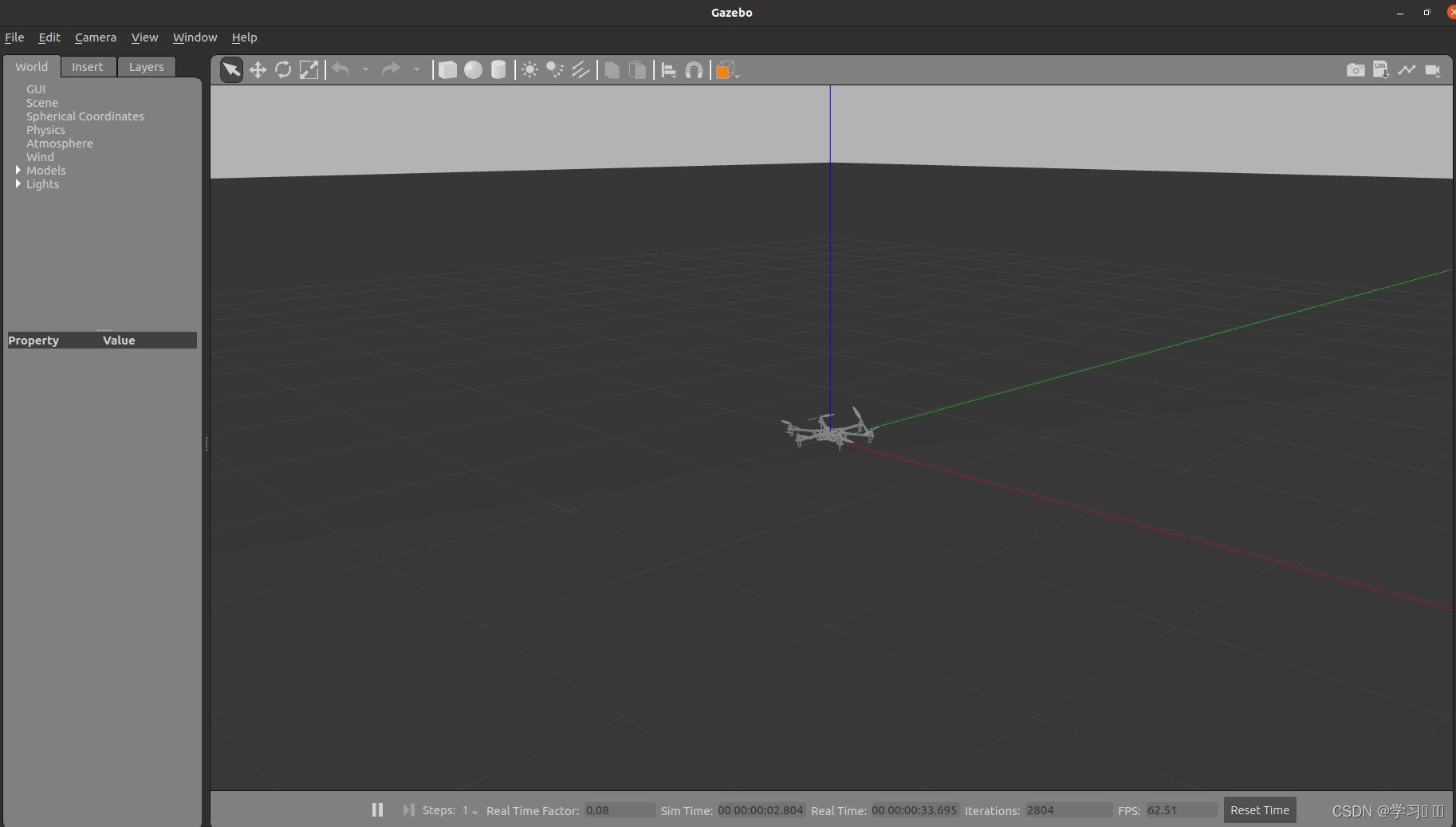
右键uav 选择Edit model
左上角file–>save as得到一个模型文件夹(包括sdf和config文件)
将文件夹复制到ardupilot_gazebo/models内
创建仿真世界
在world文件夹新建uav.world文件
将以下内容复制进去(最后一段 uri 可以根据自己的改)
<sdf version="1.6">
<world name="default">
<physics type="ode">
<ode>
<solver>
<type>quick</type>
<iters>100</iters>
<sor>1.0</sor>
</solver>
<constraints>
<cfm>0.0</cfm>
<erp>0.9</erp>
<contact_max_correcting_vel>0.1</contact_max_correcting_vel>
<contact_surface_layer>0.0</contact_surface_layer>
</constraints>
</ode>
<real_time_update_rate>250</real_time_update_rate>
<max_step_size>0.0025</max_step_size>
</physics>
<include>
<uri>model://sun</uri>
</include>
<model name="ground_plane">
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<plane>
<normal>0 0 1</normal>
<size>5000 5000</size>
</plane>
</geometry>
<surface>
<friction>
<ode>
<mu>1</mu>
<mu2>1</mu2>
</ode>
</friction>
</surface>
</collision>
<visual name="runway">
<pose>000 0 0.005 0 0 -1.5707</pose>
<cast_shadows>false</cast_shadows>
<geometry>
<plane>
<normal>0 0 1</normal>
<size>1829 45</size>
</plane>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Runway</name>
</script>
</material>
</visual>
<visual name="grass">
<pose>0 0 -0.1 0 0 0</pose>
<cast_shadows>false</cast_shadows>
<geometry>
<plane>
<normal>0 0 1</normal>
<size>5000 5000</size>
</plane>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Grass</name>
</script>
</material>
</visual>
</link>
</model>
<model name="uav">
<pose> 0 0 0 0 0 0 </pose>
<include>
<uri>model://uav</uri>
<pose> 0 0 0 0 0 0 </pose>
</include>
</model>
</world>
</sdf>
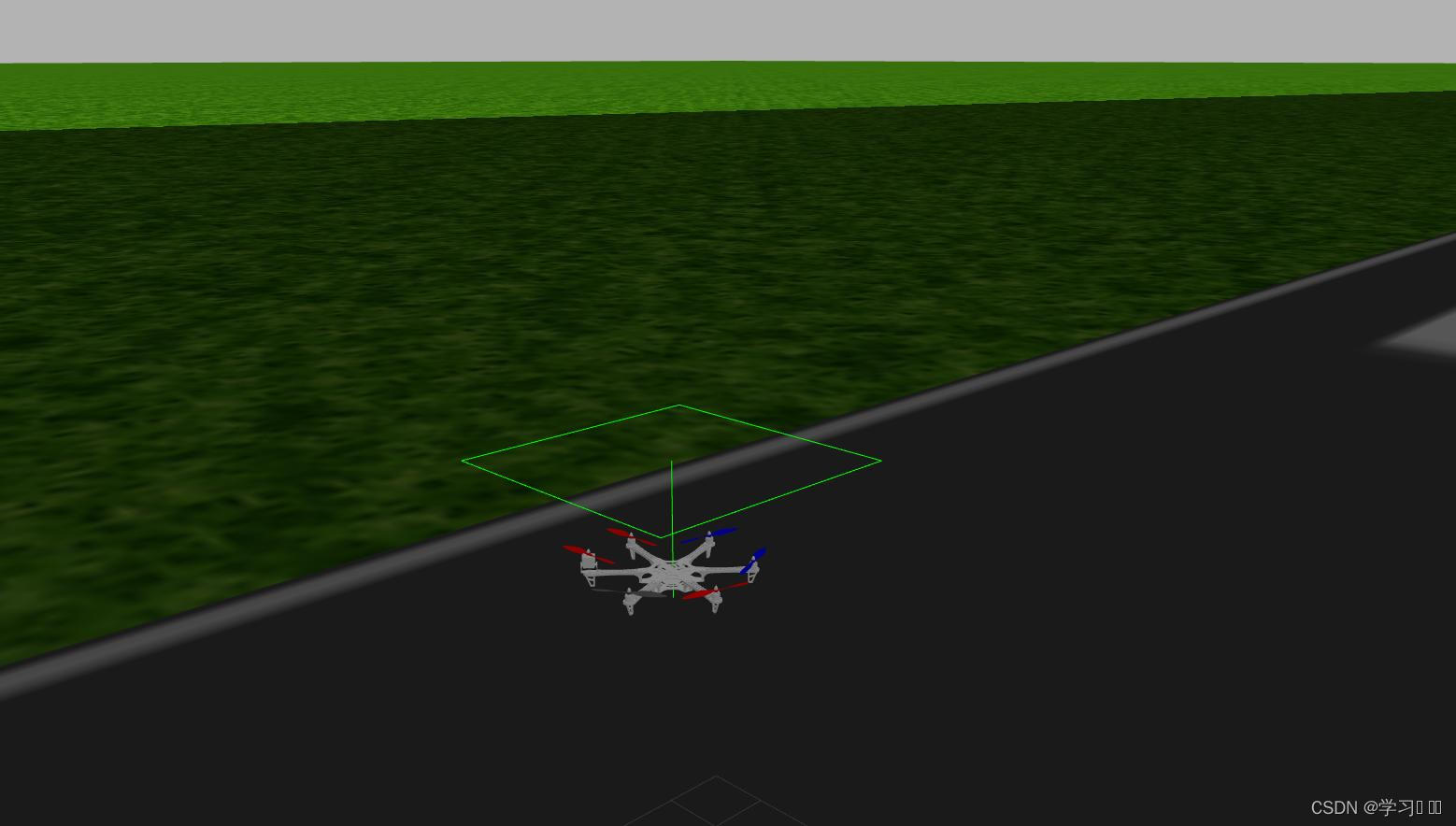
终端输入
gazebo --verbose uav.world
可以看到
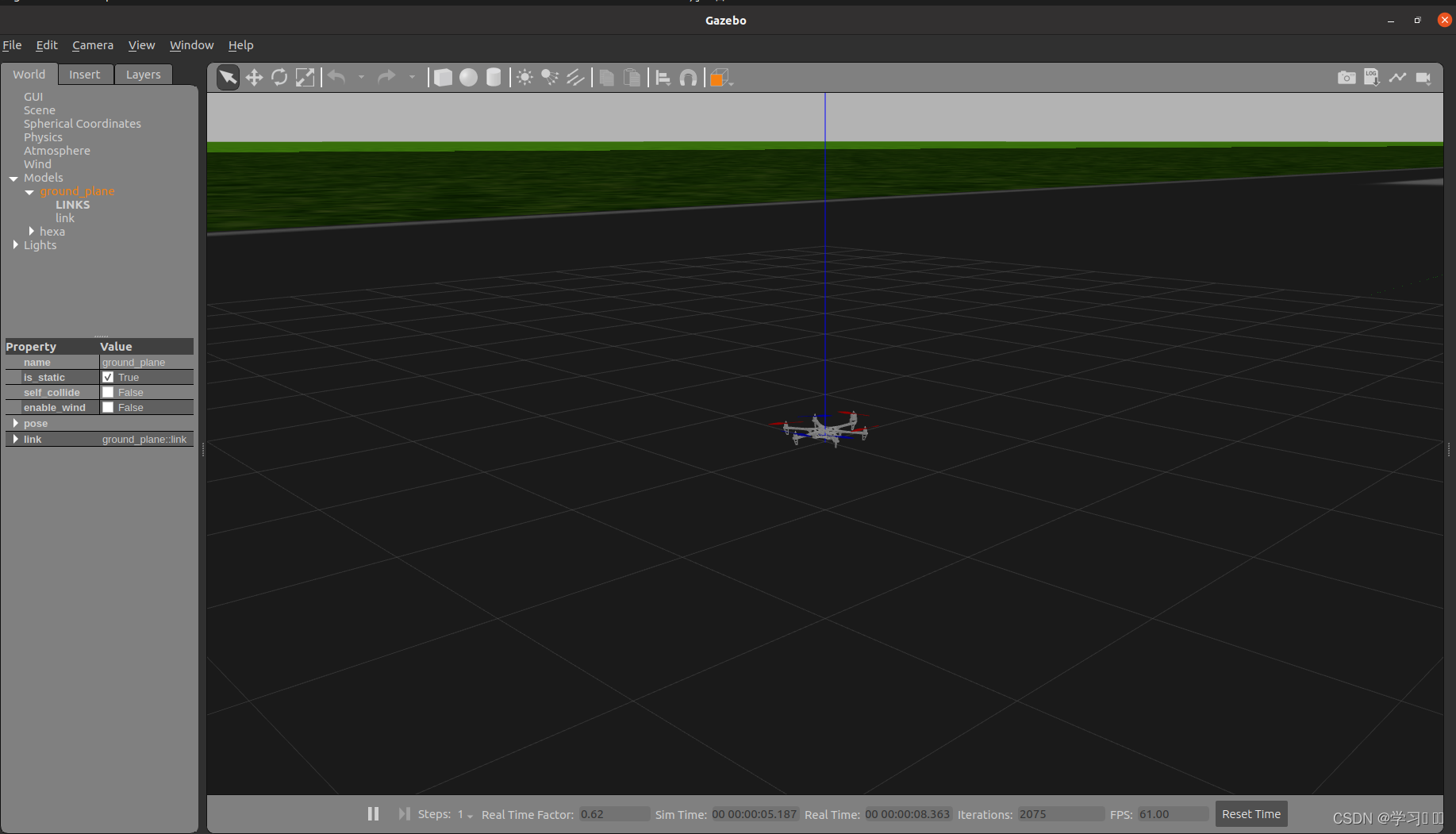
到这里模型就建立好了,只需要进行一些配置就可以开始仿真,后续过程有时间再更。
我正在尝试设置一个puppet节点,但rubygems似乎不正常。如果我通过它自己的二进制文件(/usr/lib/ruby/gems/1.8/gems/facter-1.5.8/bin/facter)在cli上运行facter,它工作正常,但如果我通过由rubygems(/usr/bin/facter)安装的二进制文件,它抛出:/usr/lib/ruby/1.8/facter/uptime.rb:11:undefinedmethod`get_uptime'forFacter::Util::Uptime:Module(NoMethodError)from/usr/lib/ruby
我正在尝试测试是否存在表单。我是Rails新手。我的new.html.erb_spec.rb文件的内容是:require'spec_helper'describe"messages/new.html.erb"doit"shouldrendertheform"dorender'/messages/new.html.erb'reponse.shouldhave_form_putting_to(@message)with_submit_buttonendendView本身,new.html.erb,有代码:当我运行rspec时,它失败了:1)messages/new.html.erbshou
我在从html页面生成PDF时遇到问题。我正在使用PDFkit。在安装它的过程中,我注意到我需要wkhtmltopdf。所以我也安装了它。我做了PDFkit的文档所说的一切......现在我在尝试加载PDF时遇到了这个错误。这里是错误:commandfailed:"/usr/local/bin/wkhtmltopdf""--margin-right""0.75in""--page-size""Letter""--margin-top""0.75in""--margin-bottom""0.75in""--encoding""UTF-8""--margin-left""0.75in""-
我在我的项目目录中完成了compasscreate.和compassinitrails。几个问题:我已将我的.sass文件放在public/stylesheets中。这是放置它们的正确位置吗?当我运行compasswatch时,它不会自动编译这些.sass文件。我必须手动指定文件:compasswatchpublic/stylesheets/myfile.sass等。如何让它自动运行?文件ie.css、print.css和screen.css已放在stylesheets/compiled。如何在编译后不让它们重新出现的情况下删除它们?我自己编译的.sass文件编译成compiled/t
我有一个对象has_many应呈现为xml的子对象。这不是问题。我的问题是我创建了一个Hash包含此数据,就像解析器需要它一样。但是rails自动将整个文件包含在.........我需要摆脱type="array"和我该如何处理?我没有在文档中找到任何内容。 最佳答案 我遇到了同样的问题;这是我的XML:我在用这个:entries.to_xml将散列数据转换为XML,但这会将条目的数据包装到中所以我修改了:entries.to_xml(root:"Contacts")但这仍然将转换后的XML包装在“联系人”中,将我的XML代码修改为
为了将Cucumber用于命令行脚本,我按照提供的说明安装了arubagem。它在我的Gemfile中,我可以验证是否安装了正确的版本并且我已经包含了require'aruba/cucumber'在'features/env.rb'中为了确保它能正常工作,我写了以下场景:@announceScenario:Testingcucumber/arubaGivenablankslateThentheoutputfrom"ls-la"shouldcontain"drw"假设事情应该失败。它确实失败了,但失败的原因是错误的:@announceScenario:Testingcucumber/ar
我在我的项目中添加了一个系统来重置用户密码并通过电子邮件将密码发送给他,以防他忘记密码。昨天它运行良好(当我实现它时)。当我今天尝试启动服务器时,出现以下错误。=>BootingWEBrick=>Rails3.2.1applicationstartingindevelopmentonhttp://0.0.0.0:3000=>Callwith-dtodetach=>Ctrl-CtoshutdownserverExiting/Users/vinayshenoy/.rvm/gems/ruby-1.9.3-p0/gems/actionmailer-3.2.1/lib/action_mailer
我的瘦服务器配置了nginx,我的ROR应用程序正在它们上运行。在我发布代码更新时运行thinrestart会给我的应用程序带来一些停机时间。我试图弄清楚如何优雅地重启正在运行的Thin实例,但找不到好的解决方案。有没有人能做到这一点? 最佳答案 #Restartjustthethinserverdescribedbythatconfigsudothin-C/etc/thin/mysite.ymlrestartNginx将继续运行并代理请求。如果您将Nginx设置为使用多个上游服务器,例如server{listen80;server
在MRIRuby中我可以这样做:deftransferinternal_server=self.init_serverpid=forkdointernal_server.runend#Maketheserverprocessrunindependently.Process.detach(pid)internal_client=self.init_client#Dootherstuffwithconnectingtointernal_server...internal_client.post('somedata')ensure#KillserverProcess.kill('KILL',
我想向我的Controller传递一个参数,它是一个简单的复选框,但我不知道如何在模型的form_for中引入它,这是我的观点:{:id=>'go_finance'}do|f|%>Transferirde:para:Entrada:"input",:placeholder=>"Quantofoiganho?"%>Saída:"output",:placeholder=>"Quantofoigasto?"%>Nota:我想做一个额外的复选框,但我该怎么做,模型中没有一个对象,而是一个要检查的对象,以便在Controller中创建一个ifelse,如果没有检查,请帮助我,非常感谢,谢谢