最近看到一篇比较不错的特征融合方法,基于注意力机制的
AAF,与此前的SENet、SKNet等很相似,但AFF性能优于它们,并且适用于更广泛的场景,包括短和长跳连接以及在Inception层内引起的特征融合。AFF是由南航提出的注意力特征融合,即插即用!
本篇博客主要参考自知乎作者 OucQxw ,知乎原文地址:https://zhuanlan.zhihu.com/p/424031096
论文下载地址:https://arxiv.org/pdf/2009.14082.pdf
Github代码地址:https://github.com/YimianDai/open-aff
特征融合是指来自不同层次或分支的特征的组合,是现代神经网络体系结构中无所不在的一部分。它通常通过简单线性的操作(例如:求和或者串联来实现),但这可能不是最佳的选择。本文提出了一个统一的通用方案,即注意力特征融合( AFF ),该方案适用于大多数常见场景,包括短和长跳连接以及在 Inception 层内引起的特征融合。
为了更好地融合语义和尺度不一致的特征,我们提出了多尺度通道注意力模块 ( MS-CAM ),该模块解决了融合不同尺度特征时出现的问题。我们还证明了初始特征融合可能会成为瓶颈,并提出了迭代注意力特征融合模块(iAFF )来缓解此问题。
SKNet 和 ResNeSt 注意力特征融合存在的问题:SKNet 和 ResNeSt 只关注同一层的特征选择,无法做到跨层特征融合。SKNet 通过相加来进行特征融合,而这些特征在规模和语义上可能存在很大的不一致性,对融合权值的质量也有很大的影响,使得模型表现受限。SKNet 和 ResNeSt 中的融合权值是通过全局通道注意机制生成的,对于分布更全局的信息,该机制更受青睐,但是对于小目标效果就不太好。是否可以通过神经网络动态地融合不同尺度的特征?AFF),适用于大多数常见场景,包括由short and long skip connections以及在Inception层内引起的特征融合。IAFF),将初始特征融合与另一个注意力模块交替集成。MSCAM),通过尺度不同的两个分支来提取通道注意力。MS-CAM) MS-CAM 主要是延续 SENet 的想法,再于 CNN 上结合 Local / Global 的特征,并在空间上用 Attention 来 融合多尺度信息 。
MS-CAM 有 2 个较大的不同:
MS-CAM 通过逐点卷积(1x1卷积)来关注通道的尺度问题,而不是大小不同的卷积核,使用点卷积,为了让 MS-CAM 尽可能的轻量化。MS-CAM 不是在主干网中,而是在通道注意力模块中局部本地和全局的特征上下文特征。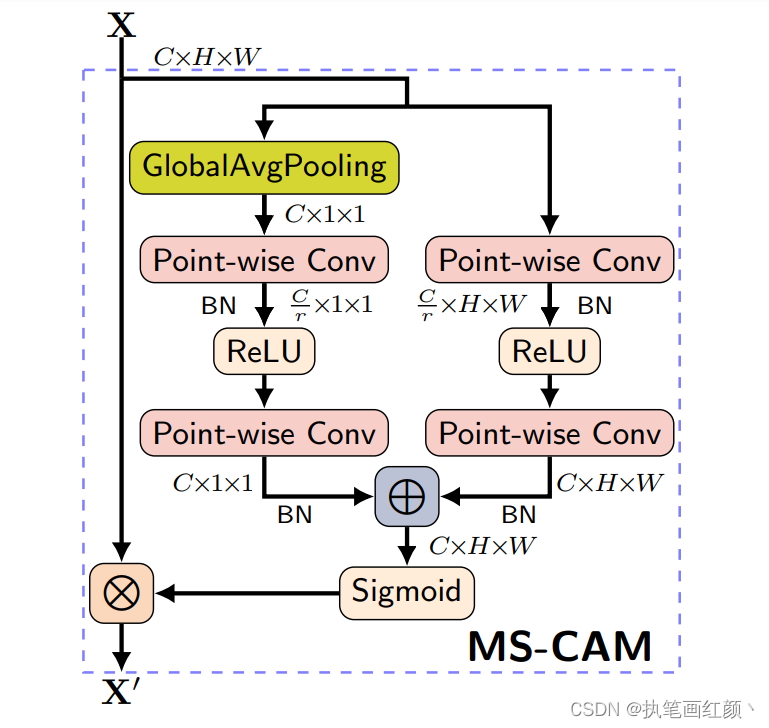
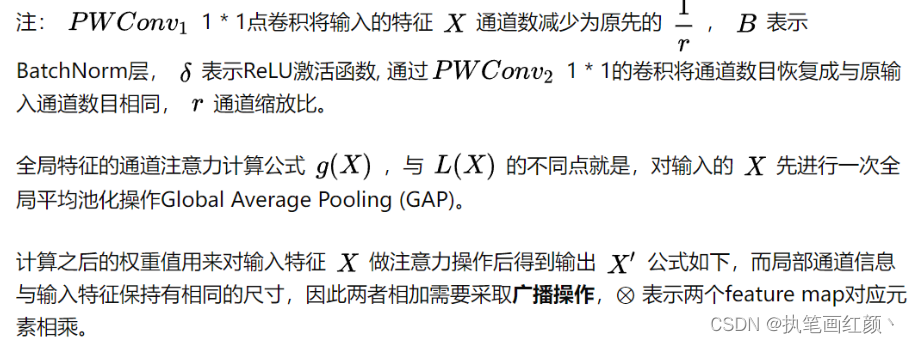
上图为 MS-CAM 的结构图,X 为输入特征,X' 为融合后的特征,右边两个分支分别表示全局特征的通道注意力和局部特征的通道注意力,局部特征的通道注意力的计算公式 L(X) 如下:


实现的代码如下:
class MS_CAM(nn.Module):
'''
单特征进行通道注意力加权,作用类似SE模块
'''
def __init__(self, channels=64, r=4):
super(MS_CAM, self).__init__()
inter_channels = int(channels // r)
# 局部注意力
self.local_att = nn.Sequential(
nn.Conv2d(channels, inter_channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(inter_channels),
nn.ReLU(inplace=True),
nn.Conv2d(inter_channels, channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(channels),
)
# 全局注意力
self.global_att = nn.Sequential(
nn.AdaptiveAvgPool2d(1),
nn.Conv2d(channels, inter_channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(inter_channels),
nn.ReLU(inplace=True),
nn.Conv2d(inter_channels, channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(channels),
)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
xl = self.local_att(x)
xg = self.global_att(x)
xlg = xl + xg
wei = self.sigmoid(xlg)
return x * wei
AFF)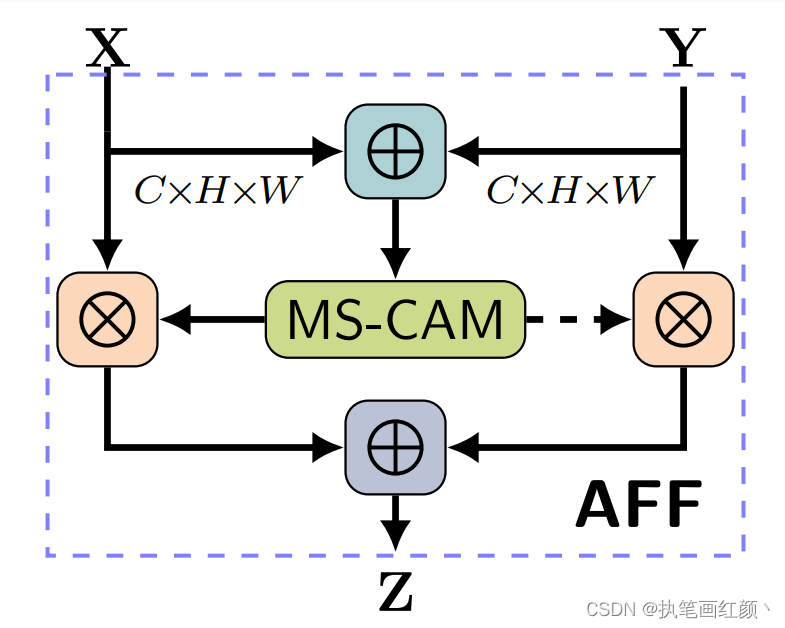
给定两个特征 X, Y 进行特征融合( Y 代表感受野更大的特征)。
AFF 的计算方法如下:

对输入的两个特征 X , Y 先做初始特征融合,再将得到的初始特征经过 MS-CAM 模块,经过 sigmod 激活函数,输出值为 0~1 之间,作者希望对 X 、Y 做加权平均,就用 1 减去这组 Fusion weight ,可以作到 Soft selection ,通过训练,让网络确定各自的权重。
实现的代码如下:
class AFF(nn.Module):
'''
多特征融合 AFF
'''
def __init__(self, channels=64, r=4):
super(AFF, self).__init__()
inter_channels = int(channels // r)
# 局部注意力
self.local_att = nn.Sequential(
nn.Conv2d(channels, inter_channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(inter_channels),
nn.ReLU(inplace=True),
nn.Conv2d(inter_channels, channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(channels),
)
# 全局注意力
self.global_att = nn.Sequential(
nn.AdaptiveAvgPool2d(1),
nn.Conv2d(channels, inter_channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(inter_channels),
nn.ReLU(inplace=True),
nn.Conv2d(inter_channels, channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(channels),
)
self.sigmoid = nn.Sigmoid()
def forward(self, x, residual):
xa = x + residual
xl = self.local_att(xa)
xg = self.global_att(xa)
xlg = xl + xg
wei = self.sigmoid(xlg)
xo = x * wei + residual * (1 - wei)
return xo
iAFF )
在注意力特征融合模块中,X , Y 初始特征的融合仅是简单对应元素相加,然后作为注意力模块的输入会对最终融合权重产生影响。作者认为如果想要对输入的特征图有完整的感知,只有将初始特征融合也采用注意力融合的机制,一种直观的方法是使用另一个 attention 模块来融合输入的特征。

公式跟 AFF 的计算一样,仅仅是多加一层attention。
实现的代码如下:
class iAFF(nn.Module):
'''
多特征融合 iAFF
'''
def __init__(self, channels=64, r=4):
super(iAFF, self).__init__()
inter_channels = int(channels // r)
# 局部注意力
self.local_att = nn.Sequential(
nn.Conv2d(channels, inter_channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(inter_channels),
nn.ReLU(inplace=True),
nn.Conv2d(inter_channels, channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(channels),
)
# 全局注意力
self.global_att = nn.Sequential(
nn.AdaptiveAvgPool2d(1),
nn.Conv2d(channels, inter_channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(inter_channels),
nn.ReLU(inplace=True),
nn.Conv2d(inter_channels, channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(channels),
)
# 第二次局部注意力
self.local_att2 = nn.Sequential(
nn.Conv2d(channels, inter_channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(inter_channels),
nn.ReLU(inplace=True),
nn.Conv2d(inter_channels, channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(channels),
)
# 第二次全局注意力
self.global_att2 = nn.Sequential(
nn.AdaptiveAvgPool2d(1),
nn.Conv2d(channels, inter_channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(inter_channels),
nn.ReLU(inplace=True),
nn.Conv2d(inter_channels, channels, kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(channels),
)
self.sigmoid = nn.Sigmoid()
def forward(self, x, residual):
xa = x + residual
xl = self.local_att(xa)
xg = self.global_att(xa)
xlg = xl + xg
wei = self.sigmoid(xlg)
xi = x * wei + residual * (1 - wei)
xl2 = self.local_att2(xi)
xg2 = self.global_att(xi)
xlg2 = xl2 + xg2
wei2 = self.sigmoid(xlg2)
xo = x * wei2 + residual * (1 - wei2)
return xo
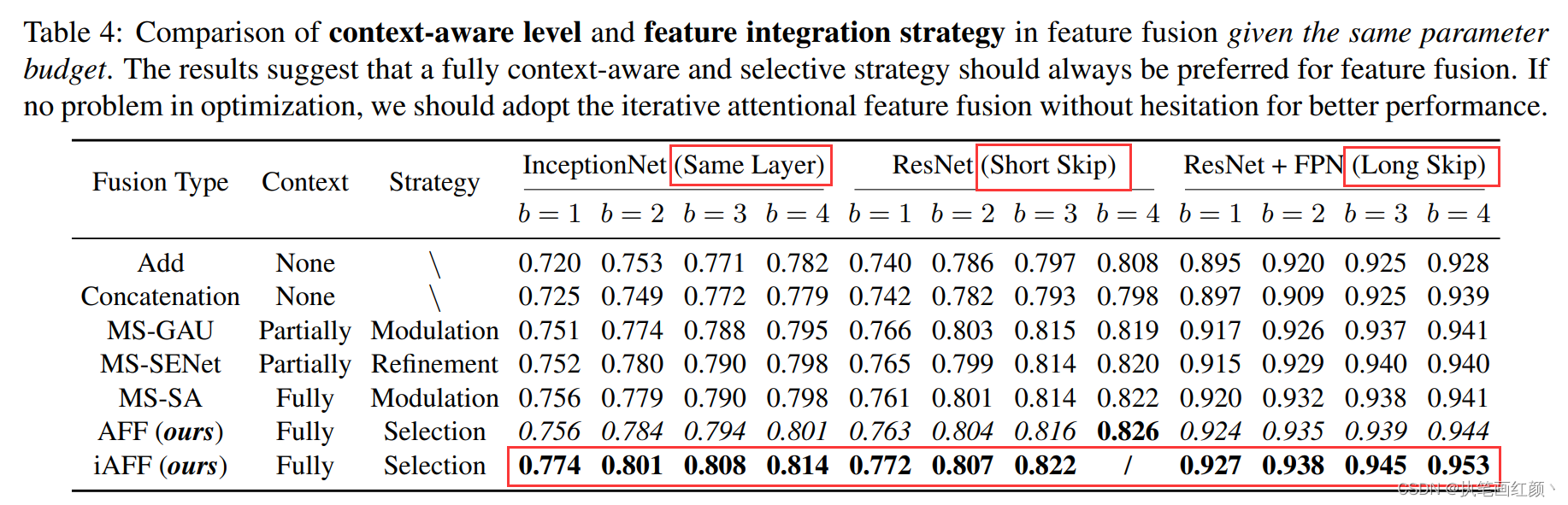
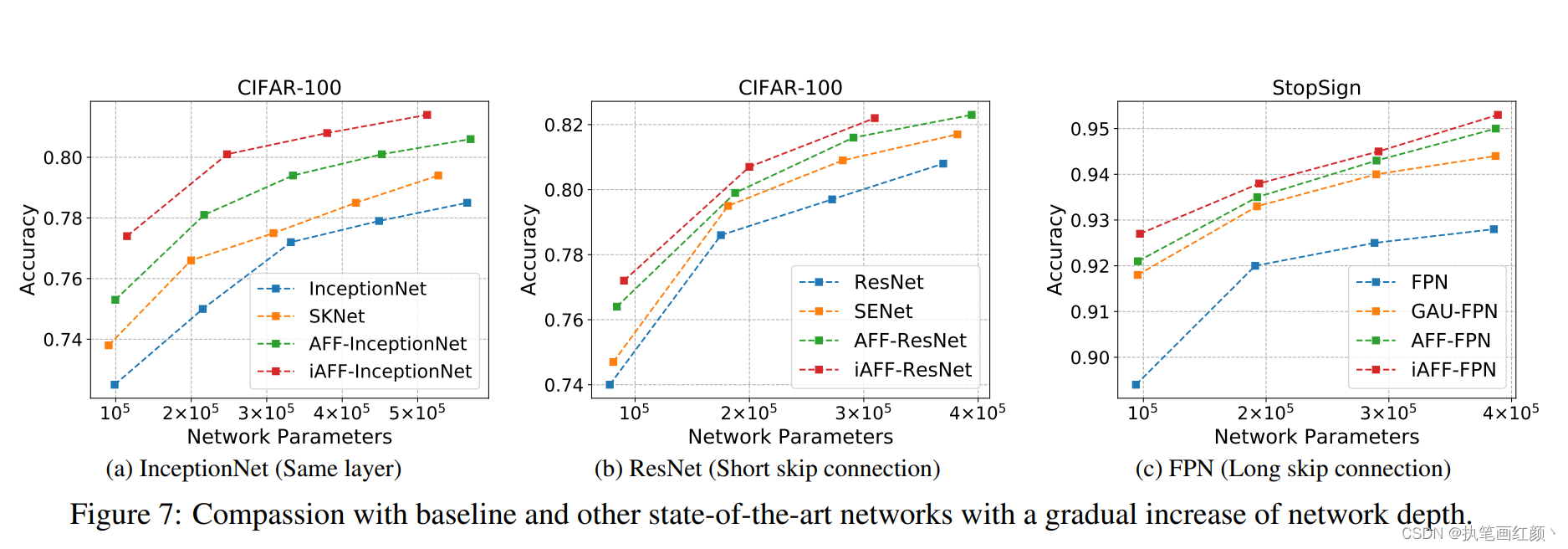
这里展示部分实验结果,详细的实验结果请参考原论文。


我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
作为新的阿里云用户,您可以50免费试用多种优惠,价值高达1,700美元(或8,500美元)。这将让您了解和体验阿里云平台上提供的一系列产品和服务。如果您以个人身份注册免费试用,您将获得价值1,700美元的优惠。但是,如果您是注册公司,您可以选择企业免费试用,提交基本信息通过企业实名注册验证,即可开始价值$8,500的免费试用!本教程介绍了如何设置您的帐户并使用您的免费试用版。关于免费试用在我们开始此试用之前,您还必须遵守以下条款和条件才能访问您的免费试用:只有在一年内创建的账户才有资格获得阿里云免费试用。通过此免费试用优惠,用户可以免费试用免费试用活动页面上列出的每种产品一次。如果您有多个帐
我是Cucumber测试的新手。我创建了两个特征文件:events.featurepartner.feature并将我的步骤定义放在step_definitions文件夹中:./step_definitions/events.rbpartner.rbCucumber似乎在所有.rb文件中查找步骤信息。有没有办法限制该功能查看特定的步骤定义文件?我之所以要这样做,是因为即使我使用了--guess标志,我也会遇到不明确的匹配错误。我之所以要这样做,有以下几个原因。我正在测试CMS,并希望在不同的功能中测试每种不同的内容类型(事件和合作伙伴)。事件.特征Feature:AddpartnerA
完成这个有困难。我正在使用seed.rb+factory_girl来使用rakedb:seed填充数据库。(我知道固定装置存在,但我想以这种方式完成,这只是一个示例,数据库将填充复杂的关联对象。)我的种子.rb:require'factory_girl_rails'["QM","CDC","SI","QS"].eachdo|n|FactoryGirl.create(:grau,nome:n)end还有我的/factories/graus.rbFactoryGirl.definedofactory:graudonomeendend但是当我运行时:rakedb:seed我得到:rakeab
我有以下工厂:FactoryGirl.definedofactory:foodosequence(:name){|n|"Foo#{n}"}trait:ydosequence(:name){|n|"Fooy#{n}"}endendend如果我跑create:foocreate:foocreate:foo,:y我得到Foo1,Foo2,Fooy1。但我想要Foo1,Foo2,Fooy3。我怎样才能做到这一点? 最佳答案 经过smile2day'sanswer的一些提示后和thisanswer,我得出以下解决方案:FactoryGirl.
我正在尝试使用RubygemRestClient为我的一个FusionTables更新样式。这是我的代码:require'rest_client'tableId=''styleId=''key=''table_url="https://www.googleapis.com/fusiontables/v1/tables/#{tableId}/styles/#{styleId}?key=#{key}"update='{"polygonOptions":{"strokeColor":"#ffffff"}}'token='STRINGCONTAININGAUTHORIZATIONTOKEN'R
我在当前项目中使用由Oracle数据库和memcached支持的RubyonRails。有一个非常常用的功能,它依赖于单个数据库View作为数据源,并且该数据源内部有其他数据库View和表。这是一个虚拟数据库View,能够从一个地方访问所有内容,而不是物化数据库View。大多数情况下,如果用户正在使用他们希望更新的功能,那么让数据保持最新很重要。从这个View获取数据时,我将安全表内部连接到View(安全表不是View本身的一部分),其中包含一些我们用来在更细粒度级别上控制数据访问的字段。例如,安全表有user_id,prop_1,prop_2列,其中prop_1,prop_2是数据库
我目前正在尝试学习cucumber以及如何正确利用它。在搜索最佳实践时,大多数旧方法都被描述了,但我还没有真正找到一个好的指南。我阅读了有关执行此操作的新方法,但我对最佳实践有一些疑问。以下是我一直在研究的一些基本cucumber场景。Scenario:UnsuccessfulloginGivenauserhasanaccountWhentheusertriestologinwithinvalidinformationThentheusershouldseeanloginerrormessageScenario:SuccessfulloginGivenauserhasanaccount
近年来,随着信息化时代的到来,三维全景拼接以视频监控领域为代表的智能硬件公司迅速崛起,随后全国各地在视频监控领域进行了大量的建设。但随着摄像头数量的增加,视频监控画面离散、庞杂、关联性差等诸多问题日渐凸显。如何优化现有视频技术,助力管理者或使用者有效、直观、准确地掌控现场实时动态,成为我国信息化前行路上面临的新课题。视频融合技术平台解决方案北京智汇云舟科技有限公司成立于2012年,专注于创新性的“视频孪生(实时实景数字孪生)”技术研发与应用。公司依托自研三维地理信息引擎(3DGIS),融合建筑信息模型(BIM)、视频监控(Video)、人工智能(AI)及物联网(IOT)等多种技术,并在此基础上
我目前正在尝试使用Ruby和Rails,我已经阅读了有关元编程的教程和书籍中的几个部分。许多人提到它是Ruby的重要组成部分,但他们并没有真正深入到细节。就好像元编程是Ruby程序员的最后边界。我有.NET背景,很难理解为什么它被认为如此有用。使用元编程有什么好处?什么是特征类,它与单例有何不同?在什么情况下使用元编程很常见?使用代码修改其他代码(尤其是非您自己的代码)的行为有哪些伦理含义? 最佳答案 使用元编程有什么好处?您可以创建比没有它更具表现力的API(例如,ActiveRecord使用元编程根据表的列名定义访问器方法,因此