最小二乘法直线拟合原理--最小二乘算法原理、来源及其Matlab实现(直线拟合) - 知乎
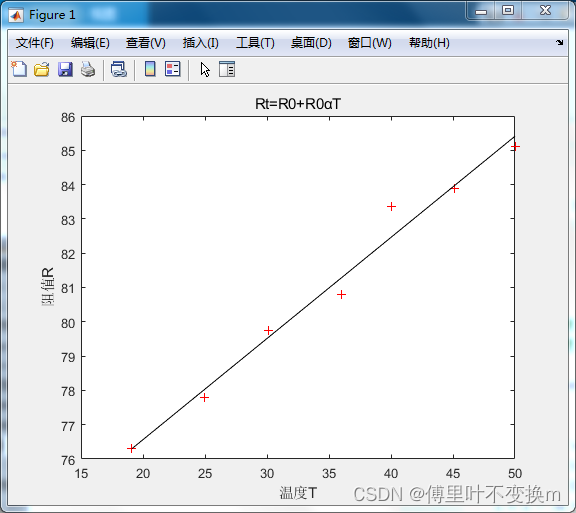
对于下列表格用最小二乘法拟合直线

matlab代码如下:
clear all
% 生成离散点
t = [19.1 25.0 30.1 36.0 40.0 45.1 50.0];
r = [76.3 77.8 79.75 80.80 83.35 83.90 85.10];
% 构造参数矩阵
A = ones(7,2);
A(:,2) = t';
% 参数初值
a = 0; %平均速度
b = 0; %初始位置
% 误差值
l = r - (b + a*t);
% 解算参数
for i = 1:7
dX = inv(A'*A)*A'*l';
b = b + dX(1);
a = a + dX(2);
l = r - (b + a*t);
end
% 成图,红色‘+’为生成的离散点,黑色直线为最小二乘拟合直线
plot(t,r,'r+',t,b+a*t,'k')
xlabel('温度T')
ylabel('阻值R')
title('Rt=R0+R0αT')
图像如下:
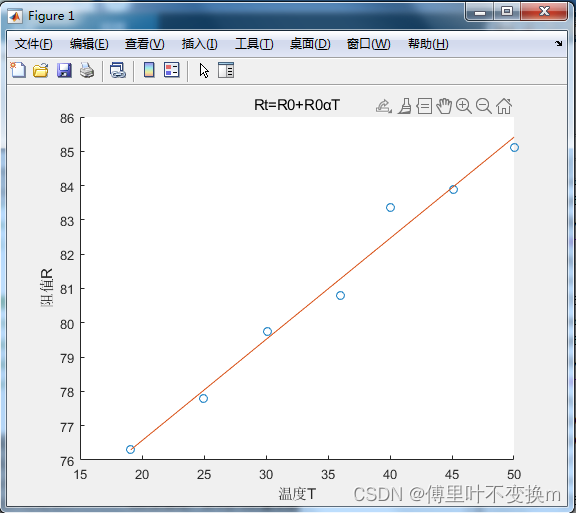
也可直接用polyfit来实现:
t = [19.1,25.0,30.1,36.0,40.0,45.1,50.0];
r = [76.3,77.8,79.75,80.80,83.35,83.90,85.10];
scatter(t,r); %scatter画出离散点
p=polyfit(t,r,1); %拟合曲线,其中p为权重系数
y1=polyval(p,t); %权重系数代入,拟合出新的y1
hold on %绘制y1
plot(t,y1)
xlabel('温度T')
ylabel('阻值R')
title('Rt=R0+R0αT')
图形为:
matlab打开matlab,用最简单的imread方法读取一个图像clcclearimg_h=imread('hua.jpg');返回一个数组(矩阵),往往是a*b*cunit8类型解释一下这个三维数组的意思,行数、数和层数,unit8:指数据类型,无符号八位整形,可理解为0~2^8的数三个层数分别代表RGB三个通道图像rgb最常用的是24-位实现方法,即RGB每个通道有256色阶(2^8)。基于这样的24-位RGB模型的色彩空间可以表现256×256×256≈1670万色当imshow传入了一个二维数组,它将以灰度方式绘制;可以把图像拆分为rgb三层,可以以灰度的方式观察它figure(1
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
假设我有以下类(class):classPersondefinitialize(name,age)@name=name@age=ageenddefget_agereturn@ageendend我有一组Person对象。是否有一种简洁的、类似于Ruby的方法来获取最小(或最大)年龄的人?如何根据它对它们进行排序? 最佳答案 这样做会:people_array.min_by(&:get_age)people_array.max_by(&:get_age)people_array.sort_by(&:get_age)
在添加一些空格以使代码更具可读性时(与上面的代码对齐),我遇到了这个:classCdefx42endendm=C.new现在这将给出“错误数量的参数”:m.x*m.x这将给出“语法错误,意外的tSTAR,期待$end”:2/m.x*m.x这里的解析器到底发生了什么?我使用Ruby1.9.2和2.1.5进行了测试。 最佳答案 *用于运算符(42*42)和参数解包(myfun*[42,42])。当你这样做时:m.x*m.x2/m.x*m.xRuby将此解释为参数解包,而不是*运算符(即乘法)。如果您不熟悉它,参数解包(有时也称为“spl
1.upto(9){|x|printx}为什么这行不通?{printx|x}}y呢? 最佳答案 它用于传递给您的block的参数。即在您的示例中,upto将使用1到9中的每个数字调用您的block,当前值可作为x获得。block参数可以有任何名称,就像方法参数一样。例如1.upto(9){|num|putsnum是有效的。就像一个方法的参数一样,一个block也可以有多个参数。例如hash.each_pair{|key,value|puts"#{key}is#{value}"} 关于ru
有没有人用ruby解决这个问题:假设我们有:a=8.1999999我们想将它四舍五入为2位小数,即8.20,然后乘以1,000,000得到8,200,000我们是这样做的;(a.round(2)*1000000).to_i但是我们得到的是8199999,为什么?奇怪的是,如果我们乘以1000、100000或10000000而不是1000000,我们会得到正确的结果。有人知道为什么吗?我们正在使用ruby1.9.2并尝试使用1.9.3。谢谢! 最佳答案 每当你在计算中得到时髦的数字时使用bigdecimalrequire'bi
1.问题描述使用Python的turtle(海龟绘图)模块提供的函数绘制直线。2.问题分析一幅复杂的图形通常都可以由点、直线、三角形、矩形、平行四边形、圆、椭圆和圆弧等基本图形组成。其中的三角形、矩形、平行四边形又可以由直线组成,而直线又是由两个点确定的。我们使用Python的turtle模块所提供的函数来绘制直线。在使用之前我们先介绍一下turtle模块的相关知识点。turtle模块提供面向对象和面向过程两种形式的海龟绘图基本组件。面向对象的接口类如下:1)TurtleScreen类:定义图形窗口作为绘图海龟的运动场。它的构造器需要一个tkinter.Canvas或ScrolledCanva
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
看来我正在回顾SO帖子中采取的步骤:Capybara,PoltergeistandPhantomjsandgivinganemptyresponseinbody.(如果你愿意,可以将其标记为重复,但我包含了一个最小的独立测试用例和版本号。)问题我做错了什么吗?我可以运行另一个可能有助于隔离问题的最小测试吗?文件:pgtest.rbrequire'rubygems'require'capybara'require'capybara/dsl'require'capybara/poltergeist'modulePGTestincludeCapybara::DSLextendselfdeft