[3D检测系列-PointRCNN] 复现PointRCNN代码
(4)显示带有modified LiDAR file附加点云标签/标记的 LiDAR 作为第 5 维
先附上环境配置:
Ubuntu18.04
python3.6
pytorch 1.8.0 torchvision 0.9.0 cuda 11.1
(这几个先不急着装,后面有教程) mayavi 4.7.1 vkt 8.2.0 traits 6.2.0 traitsui 7.2.1 PyQt5 5.15.2
https://github.com/sshaoshuai/PointRCNNPytorch版本的代码、直接进github下载,这一步应该不需要过多解释。
如果有不会下载的可以直接打开一个终端,输入一下代码
git clone https://github.com/sshaoshuai/PointRCNN!!!!注意 !!!!
!!!代码下载完后是不完善的!!!
不然会报以下错误:No moudle named 'iou3d_cuda'
pointnet2_lib打开的话是空的,这个时候需要在github中把这个文件夹单独打开,把里面的东西下载下来,然后放在本地代码文件夹里面去。然后还需要运行以下代码来安装一些工具:
sh build_and_install.sh错误1:

error: command 'gcc' failed with exit status 1
解决方法:进入一下目录:~/pointnet2_lib/pointnet2/src/ ----->将文件中所有cpp文件的的THCState_getCurrensStream(state) 全部改为 c10::cuda::getCurrentCUDAStream()
错误2:

解决方法:进入一下目录:~/lib/utils/roipool3d/src/roipool3d.cpp ----->将文件中的AT_CHECK 改为 TORCH_CHECK
首先需要下载KITTI数据集,官网的话大家就不用尝试了因为根本下不下来。有个大佬直接上传在百度云盘里面的大家可以在他里面下载一下。KITTI数据集下载(百度云)(作者都不容易大家可以给别人也点个赞支持支持!!)
然后官网的数据集结构如下:

可能有些小白不太明白(我尽量讲明白大佬们见谅,可自行跳过),可以参考我的如下:

因为在跑PointRCNN之前,我先跑过PointPIllars所以为了避免重新拷贝一份,可以直接用软连接。将PointPillars里面的数据集直接连接到这里来。
在PointRCNN的data/KITTI文件夹下:
ln -s (PointPillars数据集的路径) object
object代表的是创建的文件夹名字,最好就取这个名字,不然要修改代码。 而且数据集的路径是包含training和testing的根目录。然后就会生成一个object文件就OK了。
利用作者的预训练模型可以直接检测,将模型放在tools下面,他的是外网下载不下来。我上传到CSDN了:----PointRCNN预训练权值-----
接下里开始检测:
python eval_rcnn.py --cfg_file cfgs/default.yaml --ckpt PointRCNN.pth --batch_size 4 --eval_mode rcnn --set RPN.LOC_XZ_FINE false错误1:

TypeError: load() missing 1 requered positional argument : ‘Loader’
解决方法:
pip install pyyaml==5.1开始了!!!!现在就开始等!!
大约等10分钟后:

检测结果放在以下路径下:
PointRCNN/output/rcnn/default/eval/epoch_no_number/val/final_result/克隆可视化工具:
git clone https://github.com/kuixu/kitti_object_vis.git克隆后在data文件中也要像上面2.(2)一样设置一个软连接。可以把他的object删了后重新弄一次。接着需要一些依赖:(记得用镜像不然慢的不得鸟!!!)
pip install opencv-python pillow scipy matplotlib pyside2然后需要使用conda来安装mayavi,这个不能用pip我也不知道为什么....但是这里确实用pip的话基本上用不了....不知道为什么
conda install mayavi然后在kitti_object_vis文件中打开终端:
python kitti_object.py --show_lidar_with_depth --img_fov --const_box --vis此时可能出现以下错误:
错误1:ModuleNotFoundError: No module named 'vtkIOParallelPython'

解决方法:
conda install jsoncpp=1.8.3
pip install pyface==7.3.0
然后继续我们的代码出现一下界面:(大功告成!!)在终端按一次回车就可以查看下一张图

然后以下还有其他几种不同的显示方法:(具体的可查看源码的github kitti_object_vis)
python kitti_object.py --show_lidar_with_depth --img_fov --const_box --vis --show_image_with_boxes
python kitti_object.py --show_lidar_with_depth --img_fov --const_box --vis --show_image_with_boxes --ind 1 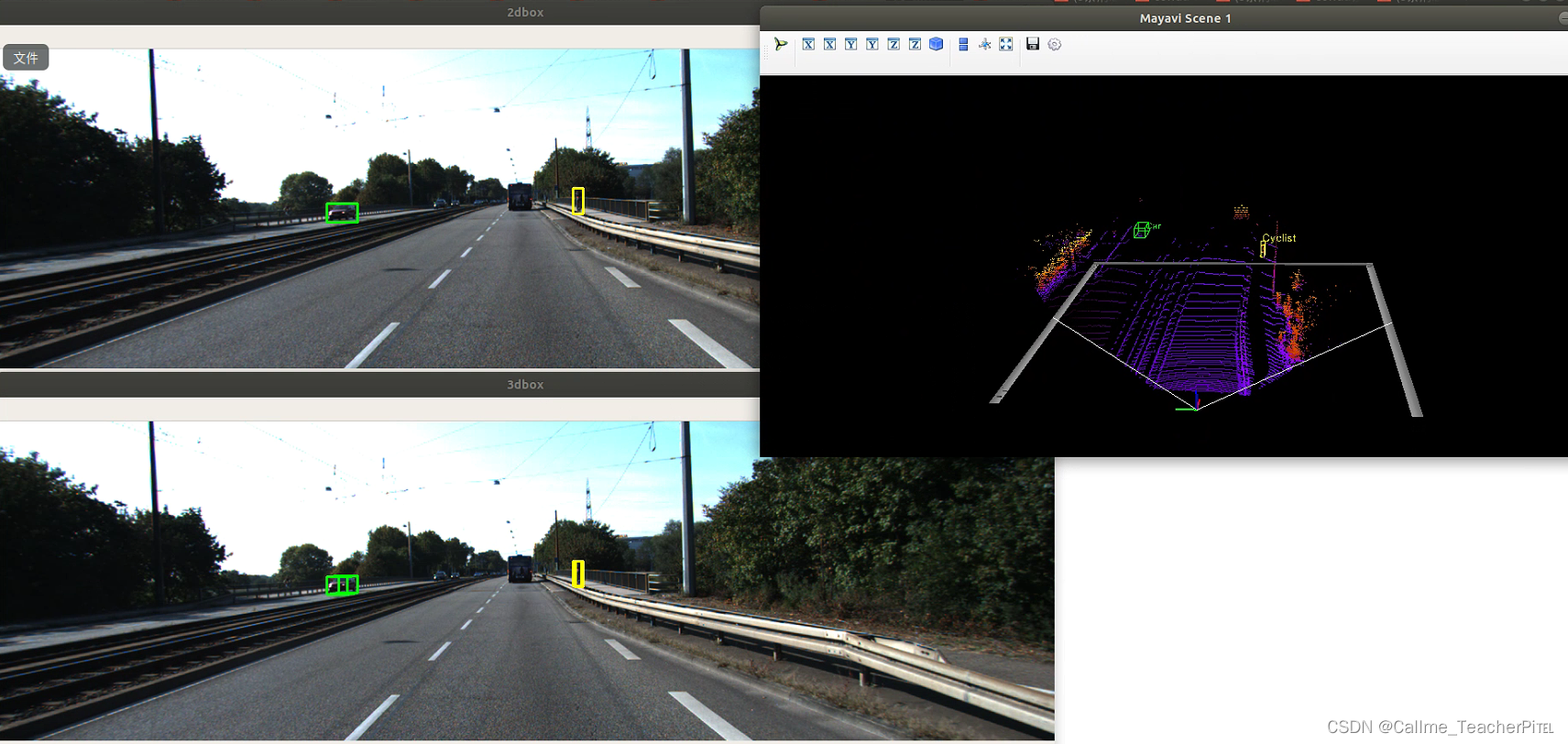
modified LiDAR file附加点云标签/标记的 LiDAR 作为第 5 维python kitti_object.py --show_lidar_with_depth --img_fov --const_box --vis --pc_label
自己写的所以有点复杂,但是至少能完成嘿嘿。如果各位有优化欢迎评论区讨论!!
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
这里是Ruby新手。完成一些练习后碰壁了。练习:计算一系列成绩的字母等级创建一个方法get_grade来接受测试分数数组。数组中的每个分数应介于0和100之间,其中100是最大分数。计算平均分并将字母等级作为字符串返回,即“A”、“B”、“C”、“D”、“E”或“F”。我一直返回错误:avg.rb:1:syntaxerror,unexpectedtLBRACK,expecting')'defget_grade([100,90,80])^avg.rb:1:syntaxerror,unexpected')',expecting$end这是我目前所拥有的。我想坚持使用下面的方法或.join,
我收到这个错误:RuntimeError(自动加载常量Apps时检测到循环依赖当我使用多线程时。下面是我的代码。为什么会这样?我尝试多线程的原因是因为我正在编写一个HTML抓取应用程序。对Nokogiri::HTML(open())的调用是一个同步阻塞调用,需要1秒才能返回,我有100,000多个页面要访问,所以我试图运行多个线程来解决这个问题。有更好的方法吗?classToolsController0)app.website=array.join(',')putsapp.websiteelseapp.website="NONE"endapp.saveapps=Apps.order("
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
我即将开始一个将录制和编辑音频文件的项目,我正在寻找一个好的库(最好是Ruby,但会考虑Java或.NET以外的任何库)以进行实时可视化波形。有人知道我应该从哪里开始搜索吗? 最佳答案 要流入浏览器的数据量很大。Flash或Flex图表可能是唯一能提高内存效率的解决方案。Javascript图表往往会因大型数据集而崩溃。 关于ruby-Ruby中的波形可视化,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.c
我正在使用Rails构建一个简单的聊天应用程序。当用户输入url时,我希望将其输出为html链接(即“url”)。我想知道在Ruby中是否有任何库或众所周知的方法可以做到这一点。如果没有,我有一些不错的正则表达式示例代码可以使用... 最佳答案 查看auto_linkRails提供的辅助方法。这会将所有URL和电子邮件地址变成可点击的链接(htmlanchor标记)。这是文档中的代码示例。auto_link("Gotohttp://www.rubyonrails.organdsayhellotodavid@loudthinking.
我正在尝试用Prawn生成PDF。在我的PDF模板中,我有带单元格的表格。在其中一个单元格中,我有一个电子邮件地址:cell_email=pdf.make_cell(:content=>booking.user_email,:border_width=>0)我想让电子邮件链接到“mailto”链接。我知道我可以这样链接:pdf.formatted_text([{:text=>booking.user_email,:link=>"mailto:#{booking.user_email}"}])但是将这两行组合起来(将格式化文本作为内容)不起作用:cell_email=pdf.make_c
相信很多人在录制视频的时候都会遇到各种各样的问题,比如录制的视频没有声音。屏幕录制为什么没声音?今天小编就和大家分享一下如何录制音画同步视频的具体操作方法。如果你有录制的视频没有声音,你可以试试这个方法。 一、检查是否打开电脑系统声音相信很多小伙伴在录制视频后会发现录制的视频没有声音,屏幕录制为什么没声音?如果当时没有打开音频录制,则录制好的视频是没有声音的。因此,建议在录制前进行检查。屏幕上没有声音,很可能是因为你的电脑系统的声音被禁止了。您只需打开电脑系统的声音,即可录制音频和图画同步视频。操作方法:步骤1:点击电脑屏幕右下侧的“小喇叭”图案,在上方的选项中,选择“声音”。 步骤2:在“声
首先回顾一下拉格朗日定理的内容:函数f(x)是在闭区间[a,b]上连续、开区间(a,b)上可导的函数,那么至少存在一个,使得:通过这个表达式我们可以知道,f(x)是函数的主体,a和b可以看作是主体函数f(x)中所取的两个值。那么可以有, 也就意味着我们可以用来替换 这种替换可以用在求某些多项式差的极限中。方法: 外层函数f(x)是一致的,并且h(x)和g(x)是等价无穷小。此时,利用拉格朗日定理,将原式替换为 ,再进行求解,往往会省去复合函数求极限的很多麻烦。使用要注意:1.要先找到主体函数f(x),即外层函数必须相同。2.f(x)找到后,复合部分是等价无穷小。3.要满足作差的形式。如果是加
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o