
GPIO常用函数总结:
函数 | 功能 | 依赖 |
IoTGpioInit(unsigned int id) | 初始化指定的IO | //base/iot_hardware/peripheral/interfaces/kits/iot_gpio.h |
hi_io_set_func(unsigned int id, unsigned char val) | 配置指定IO的复用功能 | //device/hisilicon/hispark_pegasus/sdk_liteos/include/hi_io.h |
IoTGpioSetDir(unsigned int id, IotGpioDir dir) | 设置指定IO的管脚方向id:指定的IO号dir:GPIO管脚方向(IOT_GPIO_DIR_IN、IOT_GPIO_DIR_OUT) | //base/iot_hardware/peripheral/interfaces/kits/iot_gpio.h |
IoTGpioSetOutputVal(unsigned int id, IotGpioValue val); | 设置指定IO的输出电平id:指定的IO号val:GPIO管脚的输出电平(IOT_GPIO_VALUE0、IOT_GPIO_VALUE1) | //base/iot_hardware/peripheral/interfaces/kits/iot_gpio.h |
hi_io_set_pull(unsigned int id, IotIoPull val) | 设置指定GPIO的上下拉功能id:指定的IO号val:待设置的上下拉状态 | //device/hisilicon/hispark_pegasus/sdk_liteos/include/hi_io.h |
IoTGpioGetInputVal(unsigned int id, IotGpioValue *val); | 读取指定GPIO管脚的高低电平id:指定的IO号val:返回读取的GPIO管脚电平值的指针 | //base/iot_hardware/peripheral/interfaces/kits/iot_gpio.h |
可以看到复用函数hi_io_set_func、hi_io_set_pull函数并未进一步封装到//base/iot_hardware/peripheral/interfaces/kits/iot_gpio.h中,这个在OpenHarmony2.x中也未做,写起来不太方便,希望后续统一,比如设定为IoTGpioSetFunc()、IoTGpioSetPull()函数,当然也可以自己封装。
试验目的:实现按键控制LED亮灭。
学习目标:
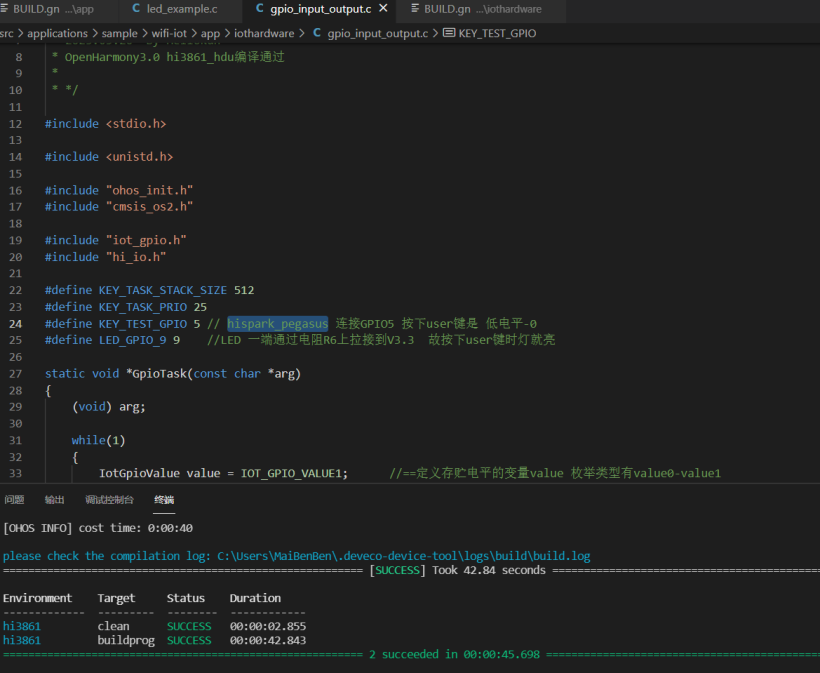
在iothardware目录下新建gpio_input_output.c,输入如下程序(以下程序适配hispark_pegasus开发板,如果是小熊派开发板,需要修改按键KEY1 GPIO,#define KEY_TEST_GPIO 11,LED GPIO为#define LED_GPIO_2 2 ,操作接口换一下即可):
/***
* user按键控制载板LED
* LED--GPIO9 默认上拉至V3.3
* user按键---GPIO5 按下接地
* 实现功能:
* 按下user键,LED亮,通过查询GPIO5端的电位控制GPIO9的输出
* 2023.03.20 By Hellokun
* OpenHarmony3.0 hi3861_hdu编译通过
*
* */
#include <stdio.h>
#include <unistd.h>
#include "ohos_init.h"
#include "cmsis_os2.h"
#include "iot_gpio.h"
#include "hi_io.h"
#define KEY_TASK_STACK_SIZE 512
#define KEY_TASK_PRIO 25
#define KEY_TEST_GPIO 5 // hispark_pegasus 连接GPIO5 按下user键是 低电平-0
#define LED_GPIO_9 9 //LED 一端通过电阻R6上拉接到V3.3 故按下user键时灯就亮
static void *GpioTask(const char *arg)
{
(void) arg;
while(1)
{
IotGpioValue value = IOT_GPIO_VALUE1; //==定义存贮电平的变量value 枚举类型有value0-value1
IoTGpioGetInputVal(KEY_TEST_GPIO,&value); //==获取GPIO user 按键引脚电平
IoTGpioSetOutputVal(LED_GPIO_9,value); //==设置GPIO9引脚的状态
}
return NULL;
}
static void GpioEntry(void)
{
osThreadAttr_t attr;
IoTGpioInit(KEY_TEST_GPIO); //==初始化GPIO5
hi_io_set_func(KEY_TEST_GPIO,HI_IO_FUNC_GPIO_5_GPIO);
IoTGpioSetDir(KEY_TEST_GPIO,IOT_GPIO_DIR_IN); //==设置user按键为输入 上拉输入
hi_io_set_pull(HI_IO_NAME_GPIO_5, HI_IO_PULL_UP);
IoTGpioInit(LED_GPIO_9); //==初始化GPIO9
IoTGpioSetDir(LED_GPIO_9,IOT_GPIO_DIR_OUT); //==设置LED接口为输出
attr.name = "GpioTask"; //==指定线程运行的任务
attr.attr_bits = 0U; //==
attr.cb_mem = NULL; //==
attr.cb_size = 0U; //==
attr.stack_mem = NULL; //==
attr.stack_size = KEY_TASK_STACK_SIZE; //==
attr.priority = KEY_TASK_PRIO; //==优先权限
if(osThreadNew(GpioTask,NULL,&attr)==NULL)
{
printf("[GpioEntry] create GpioTask failed!\n");
}
}
SYS_RUN(GpioEntry); //==ohos_init.h中定义的宏 让一个函数在系统启动时自动执行从上述按键控制LED程序可以简单总结出一个完整的轻量化系统设备开发流程包含:初始化GPIO、编写业务逻辑、注册任务线程、配置编译运行调试。
IoTGpioInit(KEY_TEST_GPIO); //==初始化GPIO5
hi_io_set_func(KEY_TEST_GPIO,HI_IO_FUNC_GPIO_5_GPIO);
IoTGpioSetDir(KEY_TEST_GPIO,IOT_GPIO_DIR_IN); //==设置user按键为输入 上拉输入
hi_io_set_pull(HI_IO_NAME_GPIO_5, HI_IO_PULL_UP);static void *GpioTask(const char *arg)
{
(void) arg;
while(1)
{
IotGpioValue value = IOT_GPIO_VALUE1; //==定义存贮电平的变量value 枚举类型有value0-value1
IoTGpioGetInputVal(KEY_TEST_GPIO,&value); //==获取GPIO user 按键引脚电平
IoTGpioSetOutputVal(LED_GPIO_9,value); //==设置GPIO9引脚的状态
}
return NULL;
}static void GpioEntry(void)
{
osThreadAttr_t attr;
attr.name = "GpioTask"; //==指定线程运行的任务
attr.attr_bits = 0U; //==
attr.cb_mem = NULL; //==
attr.cb_size = 0U; //==
attr.stack_mem = NULL; //==
attr.stack_size = KEY_TASK_STACK_SIZE; //==
attr.priority = KEY_TASK_PRIO; //==优先权限
if(osThreadNew(GpioTask,NULL,&attr)==NULL)
{
printf("[GpioEntry] create GpioTask failed!\n");
}
}
SYS_RUN(GpioEntry); //==ohos_init.h中定义的宏 让一个函数在系统启动时自动执行通过上述讲解,相信对一个完整轻量化设备开发有了一定的了解。下面编译gpio_input_output工程验证按键控制LED是否成功。如何才能让我们的工程参与编译呢?
static_library("led_example") {
sources = [
# "led_example.c",
"gpio_input_output.c"
]
include_dirs = [
"//utils/native/lite/include",
"//kernel/liteos_m/kal/cmsis",
"//base/iot_hardware/peripheral/interfaces/kits",
"//device/hisilicon/hispark_pegasus/sdk_liteos/include", #添加hi_io。h依赖路径
]
}编译运行即可,编译成功后,按下开发板按键测试即可。
hi3861芯片支持4路PWM,
本节学习如何使用hi3861的标准PWM。hi3861PWM通道:pwm0 -pwm1 -pwm2 -pwm3 -pwm4 -pwm5,均是复用接口。PWM相关函数:
函数 | 功能 | 依赖 |
IoTPwmInit(unsigned int port) | 初始化PWM端口,Port:指定的PWM端口 | //base/iot_hardware/peripheral/interfaces/kits/iot_pwm.h |
IoTPwmStart(unsigned int port, unsigned short duty, unsigned int freq) | 启动PWM输出。Port:指定的PWM端口duty:指PWM信号输出的占空比。该值范围为1到99freq:指PWM信号输出的频率。取值范围为:[1, 65535] | //base/iot_hardware/peripheral/interfaces/kits/iot_pwm.h |
IoTPwmStop(unsigned int port) | 停止PWM信号输出 | //base/iot_hardware/peripheral/interfaces/kits/iot_pwm.h |
本案例通过PWM实现LED呼吸灯效果。使用第一通道(pwm0)的输出, 查阅《Hi3861V100/Hi3861LV100/Hi3881V100 WiFi芯片 用户指南》表6.3-Hi3861引脚复用功能表可知pwm0可在GPIO7、GPIO9两个引脚配置。这里选GPIO9,因为载板LED接了GPIO9,方便测试。
开发流程总结:配置GPIO9 为PWM0通道、循环变化占空比实现LED呼吸效果、注册任务线程。
IoTGpioInit(PWM0_TEST_GPIO);
hi_io_set_func(PWM0_TEST_GPIO,HI_IO_FUNC_GPIO_9_PWM0_OUT); //==初始化 GPIO9 的pwm复用功能
IoTPwmInit(PWM0); //==初始化pwm0
IoTPwmStart(PWM0,50,80000); //==配置pwm0输出参数:占空比50%、频率160M/80000=2KHzstatic void PwmdemoTask(void *arg)
{
(void) arg;
int val=1;
while(1)
{
for (val=99;val>1;val-=5)
{
IoTPwmStart(PWM0,val,3200000);
osDelay(10);
}
osDelay(10);
for (val=1;val<99;val+=5)
{
IoTPwmStart(PWM0,val,3200000);
osDelay(10);
}
osDelay(100);
IoTPwmStop(PWM0);
}
}/***
* Hi3861 gpio输出pwm(gpio复用功能)
* 通道:pwm0 -pwm1 -pwm2 -pwm3 -pwm4 -pwm5
* 一共6个pwm通道,这里测试第一通道(pwm0)的输出,
* 查阅《Hi3861V100/Hi3861LV100/Hi3881V100 WiFi芯片 用户指南》表6.3-Hi3861引脚复用功能表可知
* pwm0可在GPIO7、GPIO9两个引脚配置。这里选GPIO9,因为载板led接了GPIO9,方便测试
* 实现功能:
* 控制外接led亮度呼吸效果
* 2023.03.20 By HelloKun
* OpenHarmony3.0 hi3861_hdu编译通过
*
*/
#include <stdio.h>
#include <unistd.h>
#include "ohos_init.h"
#include "cmsis_os2.h"
#include "iot_gpio.h"
#include "hi_io.h"
#include "iot_pwm.h"
#include "hi_time.h"
#define PWM_TASK_STACK_SIZE 512
#define PWM_TASK_PRIO 25
#define PWM0_TEST_GPIO 9
#define PWM0 0 //== hi_pwm.h 中定义了枚举类型 HI_PWM_PORT_PWM0 0
static void PwmdemoTask(void *arg)
{
(void) arg;
int val=1;
while(1)
{
for (val=99;val>1;val-=5)
{
IoTPwmStart(PWM0,val,3200000);
osDelay(10);
}
osDelay(10);
for (val=1;val<99;val+=5)
{
IoTPwmStart(PWM0,val,3200000);
osDelay(10);
}
osDelay(100);
IoTPwmStop(PWM0);
}
}
static void PwmdemoEntry(void)
{
osThreadAttr_t attr;
IoTGpioInit(PWM0_TEST_GPIO);
hi_io_set_func(PWM0_TEST_GPIO,HI_IO_FUNC_GPIO_9_PWM0_OUT); //==初始化 GPIO9 的pwm复用功能
IoTPwmInit(PWM0); //==初始化pwm0
IoTPwmStart(PWM0,50,80000); //==配置pwm0输出参数:占空比50%、频率160M/80000=2KHz
attr.name = "PwmdemoTask"; //==指定线程运行的任务
attr.attr_bits = 0U; //==
attr.cb_mem = NULL; //==
attr.cb_size = 0U; //==
attr.stack_mem = NULL; //==
attr.stack_size = PWM_TASK_STACK_SIZE; //==
attr.priority = PWM_TASK_PRIO; //==优先权限
if(osThreadNew(PwmdemoTask,NULL,&attr)==NULL){
printf("[PwmdemoEntry] creat PwmdemoTask failed!\n");
}
}
SYS_RUN(PwmdemoEntry);修改BUILD.gn文件,添加gpio_pwm.c参与编译。
static_library("led_example") {
sources = [
# "led_example.c",
#"gpio_input_output.c",
# "gpio_adc.c",
"gpio_pwm.c"
]
include_dirs = [
"//utils/native/lite/include",
"//kernel/liteos_m/kal/cmsis",
"//base/iot_hardware/peripheral/interfaces/kits",
"//device/hisilicon/hispark_pegasus/sdk_liteos/include",
]
}运行结果如图:
本节单独讲模拟PWM输出的实现思路。因为查看iot_pwm.h可知,hi3861无法输出1/20ms频率的方波,无法控制数字舵机,这种情况下只有通过GPIO模拟PWM输出。思想是结合GPIO基本输出和延时函数,人为控制GPIO输出电平和周期。
思路: 配置GPIO为输出、循环输出模拟方波、注册任务线程
/** * @brief Servo control *
@param servoID number of servo (任意GPIO) 如7-8-9-10 *
@param angle input value: 0-20000 *
*/
void My_servo(uint8_t servoID,int angle)
{
int j=0;
for (j=0;j<5;j++)
{
GpioSetOutputVal(servoID, 1);
hi_udelay(angle); //angle ms
GpioSetOutputVal(servoID, 0);
hi_udelay(20000-angle);//
}//20ms 控制舵机
}其中GpioSetOutputVal(servoID, 1);用于输出的GPIO需要初始化为输出。
本节了解 hi3861-ADC 的使用方法,解决如何配置一个 GPIO 实现 AD 转换的问题。
AD 转换用途很广,在模拟量采集场景必不可少。后续实验中使用到的人体红外传感器、光
敏电阻以及 MQ2 燃气传感器都会使用到 ADC 功能。
ADC相关函数整理如下:
函数 | 功能 | 依赖 |
hi_adc_read(hi_adc_channel_index channel, hi_u16 *data, hi_adc_equ_model_sel equ_model,hi_adc_cur_bais cur_bais, hi_u16 delay_cnt) | 根据输入参数从指定的ADC通道读取一段采样数据。channel:表示指定的ADC通道;data:表示指向存储读取数据的地址的指针;equ_model表示方程模型;cur_bais表示模拟功率控制模式;delay_cntt表示从重置到转换开始的时间计数(一次计数是334ns,其值需在0~0xFF0之间) | ./iot_adc.h |
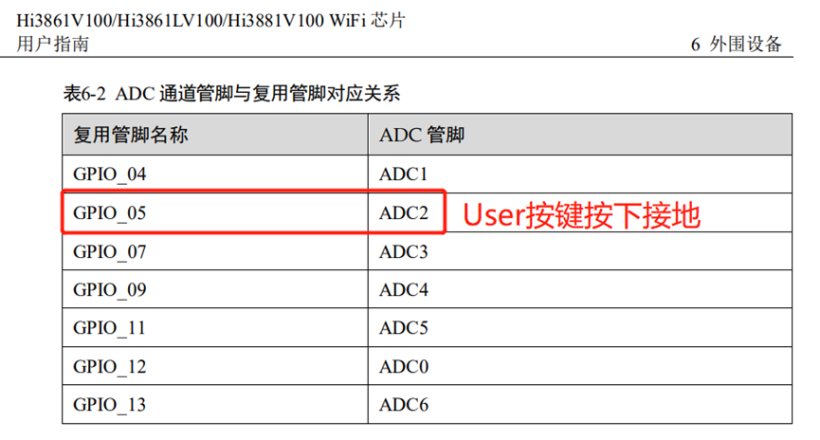
hi3861有ADC0-ADC6七个通道,是GPIO的复用功能。对应的GPIO和ADC通道如下表:
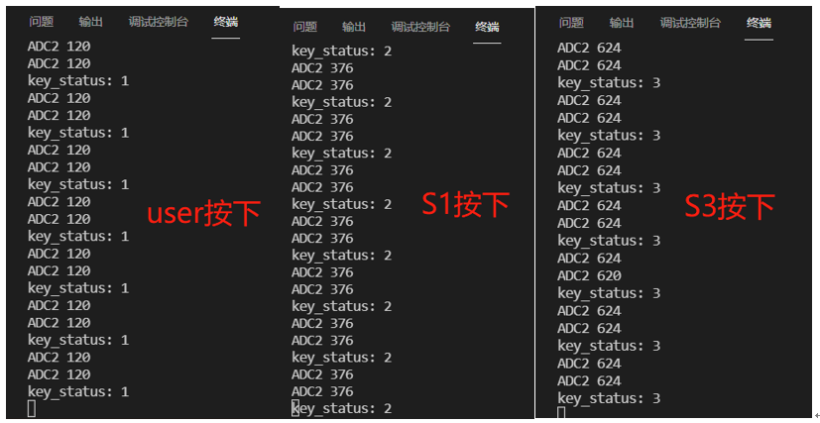
本实验是熟悉 GPIO 的ADC功能,采集连接到同一个 GPIO 口的三个按键按下对应的电
压值。为了明确是哪一个按键按下,除了在调试口使用 printf 函数查看采集的电压外,我们还使用核心板上的 LED 不同闪烁模式以区别。
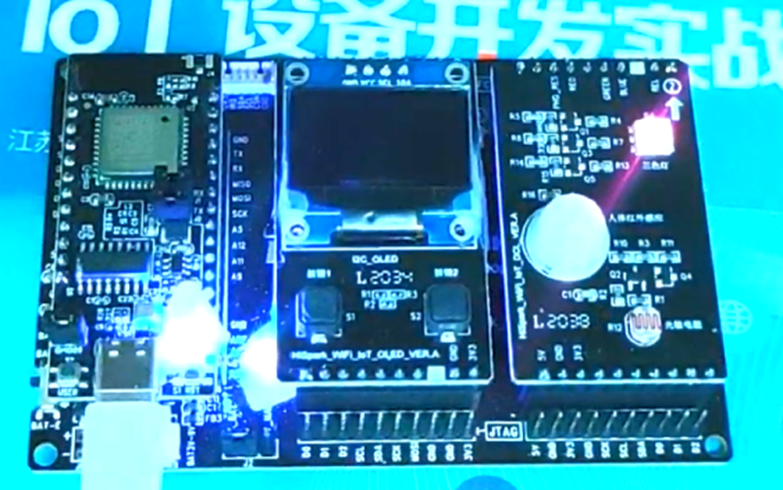
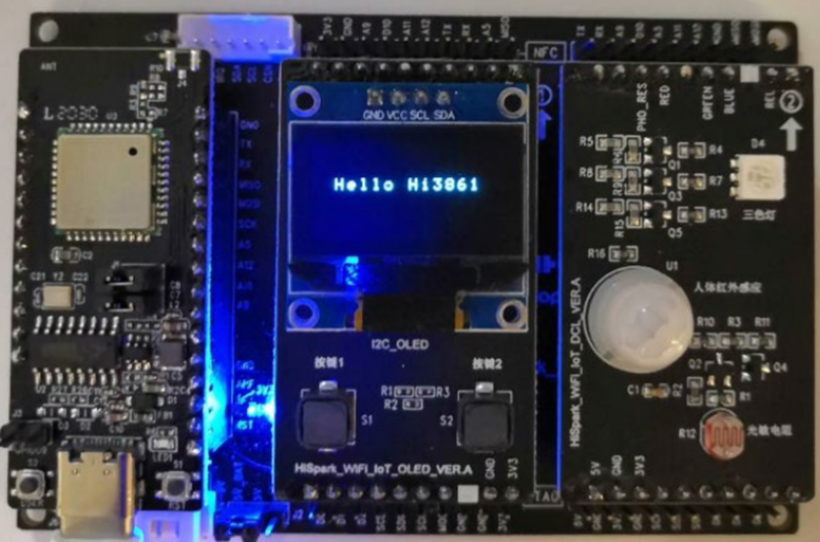
本实验需要使用到hi3861核心板(带一个user按键)、底板、oled显示板(带有两个按键s1、s2 )。安装方式参考下图。
值得注意的是本实验中使用到三个按键连接到同一个GPIO口—GPIO5,对应ADC2通道。参考hi3861核心板资料,每个按键不同状态对应的ADC值整理如下:user按键[5,228]、S1按键[228,455]、S2按键[455,682]、无按键按下[1422,1820],以此区分按键状态。
当然可以只使用一块核心板也可以测试ADC功能,通过串口输出ADC值查看功能是否正常。
思路是:设置GPIO5为ADC功能、读取ADC数值、不同按键按下LED不同状态、注册任务线程。
IoTGpioInit(KEY_TEST_GPIO); //==初始化GPIO5
hi_io_set_func(KEY_TEST_GPIO,HI_IO_FUNC_GPIO_5_GPIO);//=作为普通 io 接口IoTGpioSetDir(KEY_TEST_GPIO,IOT_GPIO_DIR_IN); //==io 方向-输入
hi_io_set_pull(KEY_TEST_GPIO, HI_IO_PULL_UP); //==上拉输入//读取电压值
unsigned short int button_adc_get(void)
{
unsigned short int data;
if (hi_adc_read( HI_ADC_CHANNEL_6, &data, HI_ADC_EQU_MODEL_1, HI_ADC_CUR_BAIS_DEFAULT, 0) == 0) {
data = (float)data * 1.8 * 4 / 4096.0;
printf("ADC2 %.2f \n",data);
return data;
}
}/**
* Hi3861: gpio ADC功能
* 读取 GPIO5 不同按键电压(主板有user按键,oled拓展板有S1、S2)
* 控制led,GPIO9-0 灯亮
* 查阅润和Hi3861硬件资料可知:
* 1)一共8个ADC通道,ADC0--ADC7 但通道7为参考电压,不能adc转换。
* 2)GPIO5---ADC2 第3通道
* 3)各个按键ADC值上下限如下:
* GPIO5 ---user按键 [5,228]
* ---S1 按键 [228,455]
* ---S2 按键 [455,682]
* ---无按键按下[1422,1820] 也就是GPIO是上拉输入
* 思路: ①轮询按键方式读取(调用内核接口创建线程任务)
* ②中断方式读取
* 这里只演示第①种方式。
* Code By: HelloKun 2023.03.21
* OpenHarmony3.0 hi3861_hdu编译通过
* */
#include <stdio.h>
#include <unistd.h>
#include "ohos_init.h"
#include "cmsis_os2.h" //==系统依赖 包括usleep()
#include "iot_gpio.h" //==IoTGpioInit()、IoTGpioSetDir()、IoTGpioSetOutPutVal();
#include "hi_io.h" //==hi_io_set_func()、hi_io_set_pull()
#include "hi_adc.h" //==hi_adc_read()
#define KEY_TASK_STACK_SIZE 512
#define KEY_TASK_PRIO 24
#define KEY_TEST_GPIO 5 //连接GPIO5
#define LED_GPIO_9 9 //LED一端通过电阻R6上拉接到V3.3
typedef enum { //==枚举电压范围
ADC_USR_MIN = 5,
ADC_USR_MAX = 228,
ADC_S1_MIN, //==229
ADC_S1_MAX = 512,
ADC_S2_MIN, //==513
ADC_S2_MAX = 854
}AdcValue;
typedef enum { //==对应的按键标识
SSU_NONE, //==0
SSU_USER,
SSU_S1,
SSU_S2 //==3
}KeyCode;
//读取电压值
unsigned short int button_adc_get(void)
{
unsigned short int data;
if (hi_adc_read( HI_ADC_CHANNEL_6, &data, HI_ADC_EQU_MODEL_1, HI_ADC_CUR_BAIS_DEFAULT, 0) == 0) {
data = (float)data * 1.8 * 4 / 4096.0;
printf("ADC2 %.2f \n",data);
return data;
}
}
//判断具体是哪个按键按下
unsigned short int button_pressed_check(unsigned short int data)
{
KeyCode ret = SSU_NONE;
if ((ADC_USR_MIN <= data) && (data <= ADC_USR_MAX)) ret = SSU_USER;
if ((ADC_S1_MIN <= data) && (data <= ADC_S1_MAX)) ret = SSU_S1;
if ((ADC_S2_MIN <= data) && (data <= ADC_S2_MAX)) ret = SSU_S2;
if (ret != SSU_NONE) {
return ret;
}
else return 0; //==按键按下是1-2-3 返回0说明无任何按键按下
}
//循环函数
static void *GpioADCTask(const char *arg)
{
(void) arg;
while(1)
{
button_adc_get(); //获取adc值
int key_status =button_pressed_check(button_adc_get()); //判断是哪个按下
printf("key_status: %d \n",key_status);
switch (key_status){
case SSU_NONE: //无按键按下-led灭
IoTGpioSetOutputVal(LED_GPIO_9,1); break;
case SSU_USER: //==USER键-led闪烁2下后灭
IoTGpioSetOutputVal(LED_GPIO_9,0);
usleep(300000);
IoTGpioSetOutputVal(LED_GPIO_9,1);
usleep(300000);
IoTGpioSetOutputVal(LED_GPIO_9,0);
usleep(300000);
IoTGpioSetOutputVal(LED_GPIO_9,1); break;
case SSU_S1: //S1-led闪一下灭
IoTGpioSetOutputVal(LED_GPIO_9,0);
usleep(30000);
IoTGpioSetOutputVal(LED_GPIO_9,1); break;
case SSU_S2: //S2按下-led一直亮
IoTGpioSetOutputVal(LED_GPIO_9,0); break;
defualt : //无 led不亮
IoTGpioSetOutputVal(LED_GPIO_9,1); break;
}
usleep(100); //==轮询时间控制 */
}
return NULL;
}
//==任务入口函数
void GpioADCEntry(void)
{
IoTGpioInit(KEY_TEST_GPIO); //==初始化GPIO5
hi_io_set_func(KEY_TEST_GPIO,HI_IO_FUNC_GPIO_5_GPIO);//=作为普通 io 接口
IoTGpioSetDir(KEY_TEST_GPIO,IOT_GPIO_DIR_IN); //==io 方向-输入
hi_io_set_pull(KEY_TEST_GPIO, HI_IO_PULL_UP); //==上拉输入
IoTGpioInit(LED_GPIO_9);
IoTGpioSetDir(LED_GPIO_9,IOT_GPIO_DIR_OUT); //==载板led初始化
osThreadAttr_t attr; //==创建任务
attr.name = "GpioADCTask"; //==指定线程运行的任务
attr.attr_bits = 0U; //==
attr.cb_mem = NULL; //==
attr.cb_size = 0U; //==
attr.stack_mem = NULL; //==
attr.stack_size = KEY_TASK_STACK_SIZE; //==
attr.priority = KEY_TASK_PRIO; //==优先权限
if (osThreadNew((osThreadFunc_t)GpioADCTask, NULL, &attr) == NULL) {
printf("[GpioADCEntry] Falied to create GpioADCTask!\n");
}
}
SYS_RUN(GpioADCEntry); //==ohos_init.h中定义的宏 让一个函数在系统启动时自动执行static_library("led_example") {
sources = [
# "led_example.c",
# "gpio_input_output.c",
"gpio_adc.c",
]
include_dirs = [
"//utils/native/lite/include",
"//kernel/liteos_m/kal/cmsis",
"//base/iot_hardware/peripheral/interfaces/kits",
"//device/hisilicon/hispark_pegasus/sdk_liteos/include", #添加hi_io。h依赖路径
]
}试验现象,不同按钮按下输出ADC值不一样:
我正在编写一个包含C扩展的gem。通常当我写一个gem时,我会遵循TDD的过程,我会写一个失败的规范,然后处理代码直到它通过,等等......在“ext/mygem/mygem.c”中我的C扩展和在gemspec的“扩展”中配置的有效extconf.rb,如何运行我的规范并仍然加载我的C扩展?当我更改C代码时,我需要采取哪些步骤来重新编译代码?这可能是个愚蠢的问题,但是从我的gem的开发源代码树中输入“bundleinstall”不会构建任何native扩展。当我手动运行rubyext/mygem/extconf.rb时,我确实得到了一个Makefile(在整个项目的根目录中),然后当
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
我们的git存储库中目前有一个Gemfile。但是,有一个gem我只在我的环境中本地使用(我的团队不使用它)。为了使用它,我必须将它添加到我们的Gemfile中,但每次我checkout到我们的master/dev主分支时,由于与跟踪的gemfile冲突,我必须删除它。我想要的是类似Gemfile.local的东西,它将继承从Gemfile导入的gems,但也允许在那里导入新的gems以供使用只有我的机器。此文件将在.gitignore中被忽略。这可能吗? 最佳答案 设置BUNDLE_GEMFILE环境变量:BUNDLE_GEMFI
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
我正在玩HTML5视频并且在ERB中有以下片段:mp4视频从在我的开发环境中运行的服务器很好地流式传输到chrome。然而firefox显示带有海报图像的视频播放器,但带有一个大X。问题似乎是mongrel不确定ogv扩展的mime类型,并且只返回text/plain,如curl所示:$curl-Ihttp://0.0.0.0:3000/pr6.ogvHTTP/1.1200OKConnection:closeDate:Mon,19Apr201012:33:50GMTLast-Modified:Sun,18Apr201012:46:07GMTContent-Type:text/plain
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
电脑0x0000001A蓝屏错误怎么U盘重装系统教学分享。有用户电脑开机之后遇到了系统蓝屏的情况。系统蓝屏问题很多时候都是系统bug,只有通过重装系统来进行解决。那么蓝屏问题如何通过U盘重装新系统来解决呢?来看看以下的详细操作方法教学吧。 准备工作: 1、U盘一个(尽量使用8G以上的U盘)。 2、一台正常联网可使用的电脑。 3、ghost或ISO系统镜像文件(Win10系统下载_Win10专业版_windows10正式版下载-系统之家)。 4、在本页面下载U盘启动盘制作工具:系统之家U盘启动工具。 U盘启动盘制作步骤: 注意:制作期间,U盘会被格式化,因此U盘中的重要文件请注
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
@作者:SYFStrive @博客首页:HomePage📜:微信小程序📌:个人社区(欢迎大佬们加入)👉:社区链接🔗📌:觉得文章不错可以点点关注👉:专栏连接🔗💃:感谢支持,学累了可以先看小段由小胖给大家带来的街舞👉微信小程序(🔥)目录自定义组件-behaviors 1、什么是behaviors 2、behaviors的工作方式 3、创建behavior 4、导入并使用behavior 5、behavior中所有可用的节点 6、同名字段的覆盖和组合规则总结最后自定义组件-behaviors 1、什么是behaviorsbehaviors是小程序中,用于实现
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc