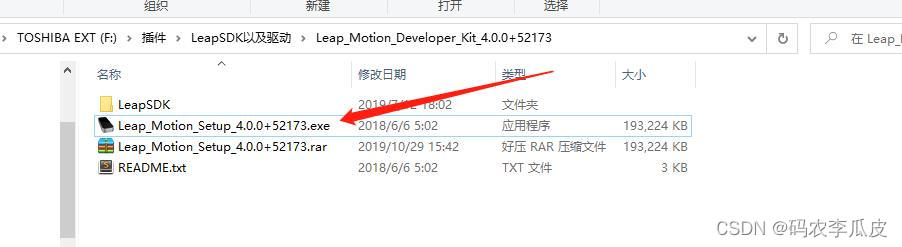
首先是硬件的安装,安装硬件的应用软件Leap_Motion_Setup_4.0.0+52173.exe,按照提示默认安装,安装好之后,插入leapmotion硬件,将绿色灯的一面朝向自己。运行软件LeapMotionControlPanel,可以在右下角看到一个绿色的图标,如下图,就说明软件可以正常使用了。

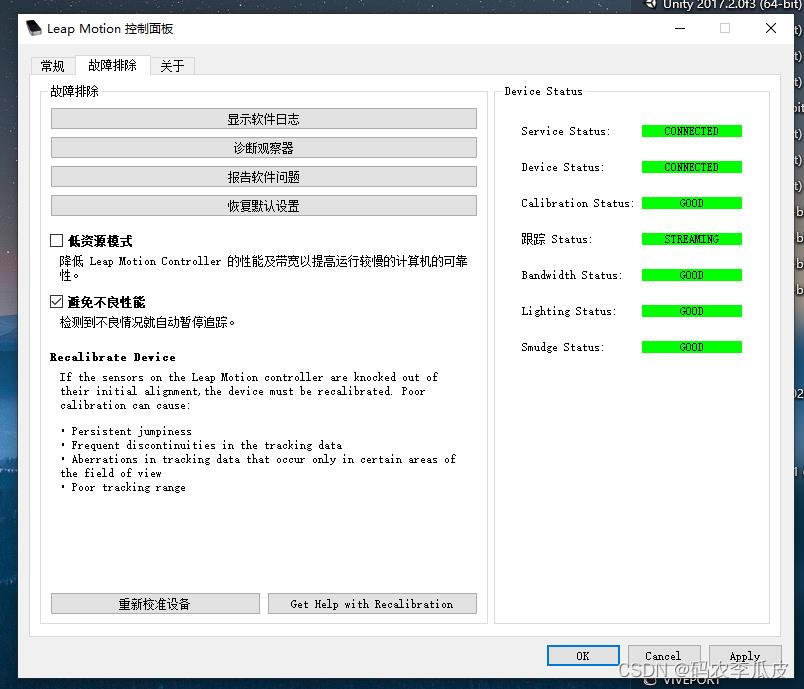
如果你的图标不是绿色的,是黄色的说明硬件的摄像头存在污渍,你可以用干净的布对硬件的摄像头进行擦拭解决。如果显示是红色的灯问题就比较大了,说明硬件不能正常工作,你可以打开LeapMotionControlPanel的可视化页面进行查找问题,如下图,也记得检查一下USB的连接线,最好是插在电脑的USB3.0的接口。
硬件的问题准备就绪了,下面就可以开始程序的开发了。
首先是新建一个工程,我用的是2019.4版本的,创建好工程后就可以导入Leapmotion的SDK包了,SDK包可以去Leapmotion的官网根据自己的Unity版本去进行合适的下载。一般导入核心模块就可以进行开发了。SDK包里面的例子也是很丰富的,可以根据自己的需要进行学习。
这个时候我们运行插件的Demo,发现功能是正常的,那么接下来我们就可以继续开发了。

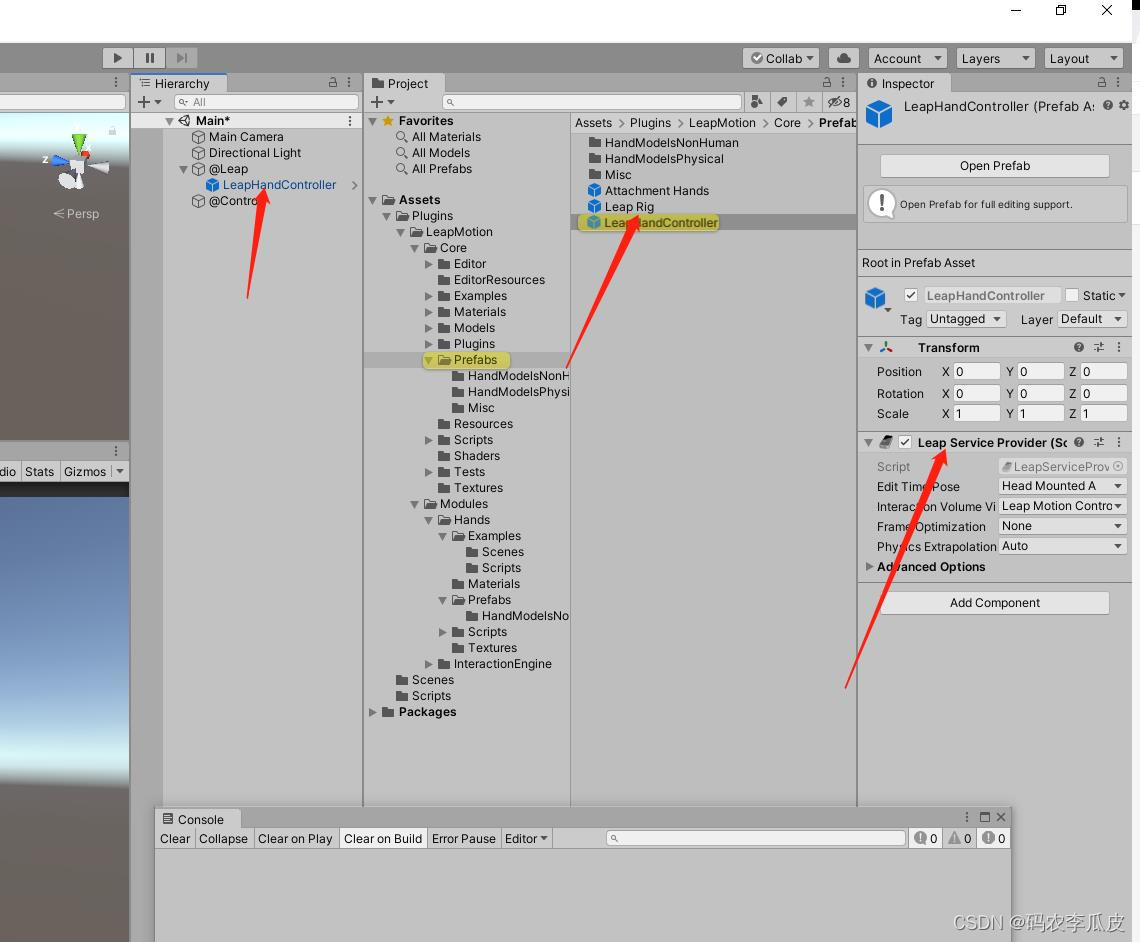
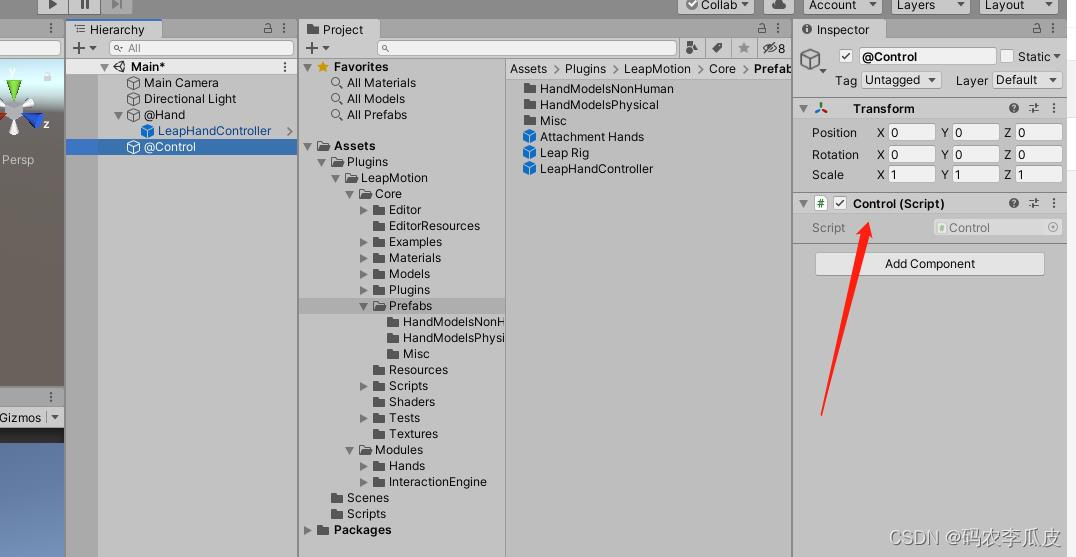
首先我们新建一个空的场景。若想接受到Leapmotion的手势信号,核心组件就是LeapProvider,我这边新建了一个空物体@Leap来管理Leapmotin的核心组件,我在预制体里面找到了LeapHandController,将其挂载在@Leap下,这样我们就可以接受到硬件的手势信号了。
接下来就是写脚本了,我新建了一个脚本Control,将其挂载到了@Control上了,在脚本里面写我们的核心逻辑然后运行,功能都是正常的。
/***********************************
* Description:描述
* Mountpoint:挂载点
* File Name: Control.cs
* Version:版本
* Author:#AuthorName
* E_mail: 1061986324@qq.com
* CreateTime: #CreateTime
***********************************/
using Leap;
using Leap.Unity;
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
namespace LJF
{
//规范命名、合理封装、限制访问修饰符
public class Control : MonoBehaviour
{
private LeapProvider lp;
private Frame fr;
private Hand hand;
private float ttm = 0;
private void Start()
{
lp = FindObjectOfType<LeapProvider>() as LeapProvider;
}
private void Update()
{
fr = lp.CurrentFrame;
if (fr.Hands.Count >= 1)
{
List<Hand> handList = fr.Hands;
hand = handList[0];
if (isMoveLeft(hand))
{
ttm += Time.deltaTime;
if (ttm >= 0.2f)
{
ttm = 0;
Debug.Log("左滑");
}
}
}
}
[Tooltip("Velocity (m/s) move toward ")]
protected float deltaVelocity = 0.7f;
//1.手划向左边
protected bool isMoveLeft(Hand hand) // 手划向左边
{
//x轴移动的速度 deltaVelocity = 0.7f isStationary (hand) 判断hand是否禁止
return hand.PalmVelocity.x < -deltaVelocity && !isStationary(hand);
}
//2.手划向右边
protected bool isMoveRight(Hand hand)// 手划向右边
{
return hand.PalmVelocity.x > deltaVelocity && !isStationary(hand);
}
//3.手划向上边
protected bool isMoveUp(Hand hand) //手向上
{
return hand.PalmVelocity.y > deltaVelocity && !isStationary(hand);
}
//4.手划向下边
protected bool isMoveDown(Hand hand) //手向下
{
return hand.PalmVelocity.y < -deltaVelocity && !isStationary(hand);
}
//5.手固定不动
protected bool isStationary(Hand hand)// 固定不动的
{
return hand.PalmVelocity.Magnitude < smallestVelocity;
}
[Tooltip("Velocity (m/s) move toward ")] //速度(m/s)走向
protected float smallestVelocity = 0.4f;
//6.是否抓取
protected bool isGrabHand(Hand hand) //是否抓取
{
return hand.GrabStrength > 0.8f; //抓取力
}
//8.手掌是否全张开
protected bool isOpenFullHand(Hand hand) //手掌全展开~
{
//Debug.Log (hand.GrabStrength + " " + hand.PalmVelocity + " " + hand.PalmVelocity.Magnitude);
return hand.GrabStrength == 0;
}
}
}
如果我们不需要手的模型,只是用来接受手势信号进行逻辑开发,上面的就已经够用了,如果我们需要手的模型那么接下来继续看吧。
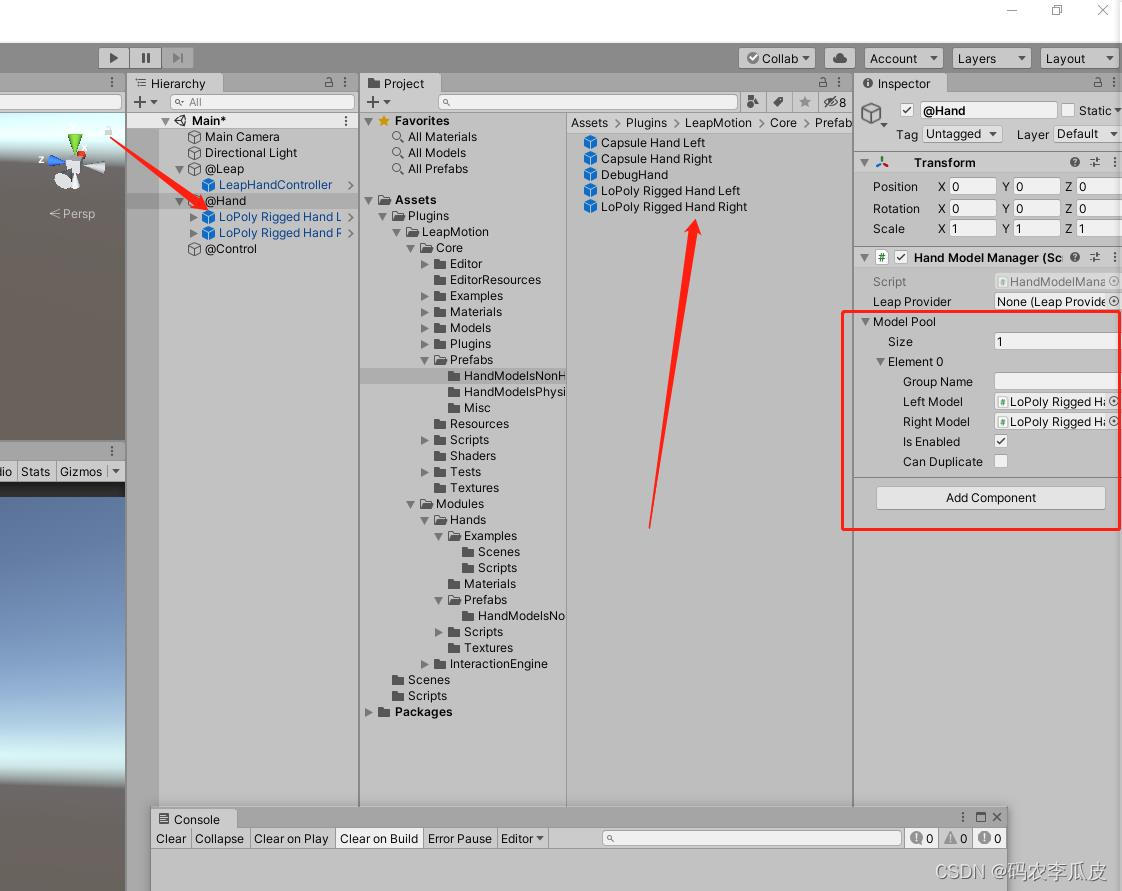
如果需要手的模型进行控制,那么我们可以创建一个空物体@Hand,给他挂载脚本HandModelManager,然后在leapmotion的预制体里面找到两个手的模型将其也放到@hand下面,然后将两个手添加到HandModelManager的属性里,记得勾选isEnable。如果需要调整手模型的位置,这个时候你直接调整手的预制体位置是没有用的,他的位置是受核心模块LeapProvider控制的,我们可以通过调整上面我们创建的@Leap的位置来调整手的位置。
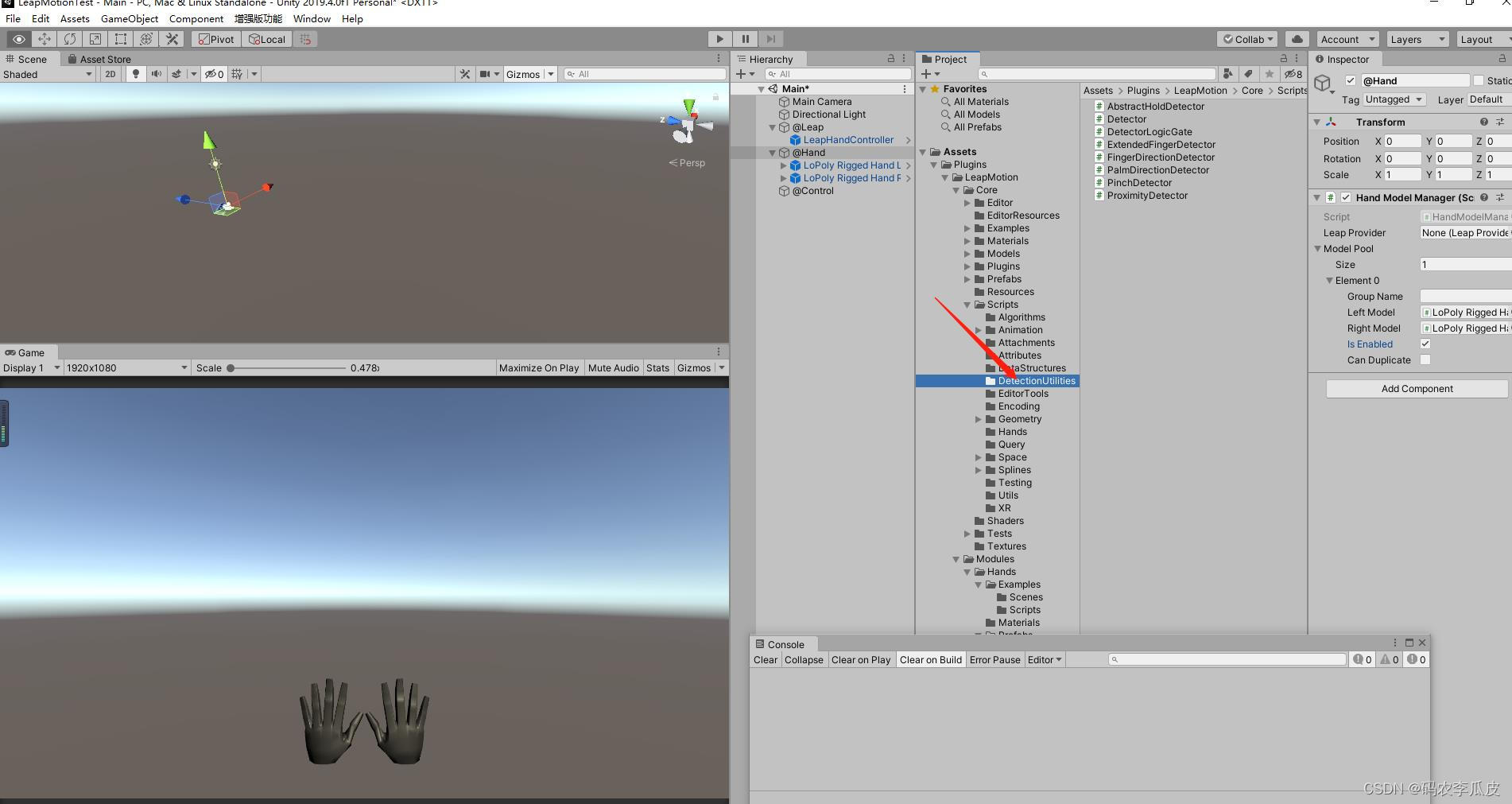
如果我们还需要获取一些手的手的判断事件,可以添加下图文件夹的这些脚本来进行实现。这些根据需要大家可以直接摸索。
上面用的的插件和软件我这边放到网盘里分享给大家,需要的可以来这里自取。
链接:https://pan.baidu.com/s/17jM7HcP12r3zbbrbmEdBkg
提取码:manp
–来自百度网盘超级会员V1的分享
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
@作者:SYFStrive @博客首页:HomePage📜:微信小程序📌:个人社区(欢迎大佬们加入)👉:社区链接🔗📌:觉得文章不错可以点点关注👉:专栏连接🔗💃:感谢支持,学累了可以先看小段由小胖给大家带来的街舞👉微信小程序(🔥)目录自定义组件-behaviors 1、什么是behaviors 2、behaviors的工作方式 3、创建behavior 4、导入并使用behavior 5、behavior中所有可用的节点 6、同名字段的覆盖和组合规则总结最后自定义组件-behaviors 1、什么是behaviorsbehaviors是小程序中,用于实现
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
ES一、简介1、ElasticStackES技术栈:ElasticSearch:存数据+搜索;QL;Kibana:Web可视化平台,分析。LogStash:日志收集,Log4j:产生日志;log.info(xxx)。。。。使用场景:metrics:指标监控…2、基本概念Index(索引)动词:保存(插入)名词:类似MySQL数据库,给数据Type(类型)已废弃,以前类似MySQL的表现在用索引对数据分类Document(文档)真正要保存的一个JSON数据{name:"tcx"}二、入门实战{"name":"DESKTOP-1TSVGKG","cluster_name":"elasticsear
文章目录1.任务背景2.任务目标3.相关知识点4.任务实操4.1安装配置JDK4.2启动FISCOBCOS4.3下载解压WeBASE-Front4.4拷贝sdk证书文件4.5启动节点4.6访问节点4.7检查运行状态5.任务总结1.任务背景FISCOBCOS其实是有控制台管理工具,用来对区块链系统进行各种管理操作。但是对于初学者来说,还是可视化界面更友好,本节就来介绍WeBASE管理平台,这是一款微众银行开源的自研区块链中间件平台,可以降低区块链使用的门槛,大幅提高区块链应用的开发效率。微众银行是腾讯牵头设立的民营银行,在国内民营银行里还是比较出名的。微众银行参与FISCOBCOS生态建设,一定
TCL脚本语言简介•TCL(ToolCommandLanguage)是一种解释执行的脚本语言(ScriptingLanguage),它提供了通用的编程能力:支持变量、过程和控制结构;同时TCL还拥有一个功能强大的固有的核心命令集。TCL经常被用于快速原型开发,脚本编程,GUI和测试等方面。•实际上包含了两个部分:一个语言和一个库。首先,Tcl是一种简单的脚本语言,主要使用于发布命令给一些互交程序如文本编辑器、调试器和shell。由于TCL的解释器是用C\C++语言的过程库实现的,因此在某种意义上我们又可以把TCL看作C库,这个库中有丰富的用于扩展TCL命令的C\C++过程和函数,所以,Tcl是
文章目录一、项目场景二、基本模块原理与调试方法分析——信源部分:三、信号处理部分和显示部分:四、基本的通信链路搭建:四、特殊模块:interpretedMATLABfunction:五、总结和坑点提醒一、项目场景 最近一个任务是使用simulink搭建一个MIMO串扰消除的链路,并用实际收到的数据进行测试,在搭建的过程中也遇到了不少的问题(当然这比vivado里面的debug好不知道多少倍)。准备趁着这个机会,先以一个很基本的通信链路对simulink基础和相关的debug方法进行总结。 在本篇中,主要记录simulink的基本原理和基本的SISO通信传输链路(QPSK方式),计划在下篇记
目录一、ESP32简单介绍二、ESP32Wi-Fi模块介绍三、ESP32Wi-Fi编程模型四、ESP32Wi-Fi事件处理流程 五、ESP32Wi-Fi开发环境六、ESP32Wi-Fi具体代码七、ESP32Wi-Fi代码解读6.1主程序app_main7.2自定义代码wifi_init_sta()八、ESP32Wi-Fi连接验证8.1测试方法8.2服务器模拟工具sscom58.3测试代码8.4测试结果前言为了开发一款亚马逊物联网产品,开始入手ESP32模块。为了能够记录自己的学习过程,特记录如下操作过程。一、ESP32简单介绍ESP32是一套Wi-Fi(2.4GHz)和蓝牙(4.2)双模解决方
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。我使用PHP的时间太长了,对它感到厌倦了。我也想学习一门新语言。我一直在使用Ruby并且喜欢它。我必须在Rails和Sinatra之间做出选择,那么您会推荐哪一个?Sinatra真的不能用来构建复杂的应用程序,它只能用于简单的应用程序吗?
📝学技术、更要掌握学习的方法,一起学习,让进步发生👩🏻作者:一只IT攻城狮。💐学习建议:1、养成习惯,学习java的任何一个技术,都可以先去官网先看看,更准确、更专业。💐学习建议:2、然后记住每个技术最关键的特性(通常一句话或者几个字),从主线入手,由浅入深学习。❤️《SpringCloud入门实战系列》解锁SpringCloud主流组件入门应用及关键特性。带你了解SpringCloud主流组件,是如何一战解决微服务诸多难题的。项目demo:源码地址👉🏻SpringCloud入门实战系列不迷路👈🏻:SpringCloud入门实战(一)什么是SpringCloud?SpringCloud入门实战