目录
飞控系统主要负责无人机在执行任务或其他飞行模式下的飞行姿态、导航、航迹、自动控制等。飞控系统具备的主要功能有:
(1)信号采集与处理,实时检测无人机的位置、高度、加速度、航向角和角速率等状态参数。
(2)输出控制信号,根据采集到的无人机数据,进行相应的数据处理和控制率解算,将控制信号输出到对应的控制对象改变航行姿态实现对无人机的精确控制。
(3)实现对机内其他电子部件的控制和数据联通以及其他扩展应用。

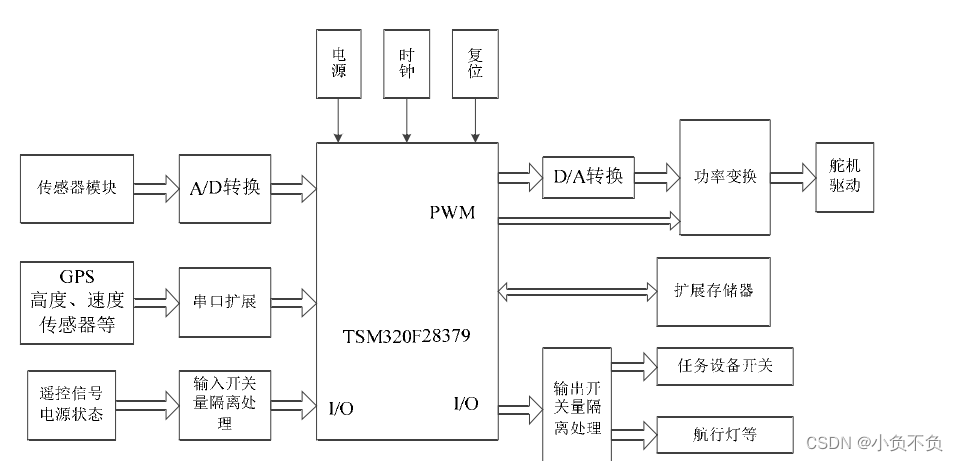
当系统处于运行模式下,通过传感器检测无人机的位置、高度、加速度、航向角和角速度等状态参数,主控芯片将这些数据和控制率的解算计算出控制量,再生成控制信号输出到对应的控制对象改变航行姿态,实现对无人机的精准控制。
地面设备部分:控制站软件、人机界面和操作手柄
接受传感器采集的飞行数据信息,向无人机发送相应的飞行指令
机载设备部分:控制计算处理器模块、传感器测量单元、传输与定位模块、舵机驱动模块

选用无人机地面控制站软件Mission Planner,该软件占用空间小,功能强大,只在Windows条件下工作,安装方便操作简单。选择对应串口和波特率便可将飞控固件加载到该软件中;可通过设置相应参数将飞行器调至最优性能;通过适当的数传电台,可以监控飞行器状态,记录数传电台传递的数据信息并储存到数据库,任务结束后可在数据库中调看飞行数据。
当前无人机飞控设计中应用较广泛的主控芯片是美国TI公司出品的32位的DSP-TSM320F28X系列(以下简称DSP或F28X)。其中F2812采用定点计算,F28335采用的是浮点计算,外设集成度高,数据和程序存储量大,AD转换更精确快速,并且相较于前者多一个MAC单元。F28379较前两者功能更加完善。
地面控制站软件显示无人机所处的高度、位置以及此刻的俯仰角、滚转角、航向角等。
飞控硬件平台设计所使用的传感器包括,姿态测量单元模块、气压高度计和超声波测距传感器。
3.3.1、姿态测量模块
姿态测量单元也称为惯性测量单元,通常由加速器和陀螺仪等几种传感器高度集成在一块子板上组成。测量俯仰角、横滚角和航向角。选用Inven Sense公司最新的MPU-6050,其外形图如图2-6所示,该型号的IMU包含三轴陀螺仪并集成三轴加速度计,提供完全的三轴惯性检测。其输出为3个轴的角速度与加速度测量值。

3.3.2、气压高度传感器
选用瑞士MEAS公司生产的MS5611气压高度传感器来测量无人机的飞行高度。其分辨率可精确到0.03h Pa,转化为高度为15cm,MS5611在正常工作模式下的供电电压为3.3V,和控制器内核供电电压一致。
工作原理:利用大气压值随海拔高度的变化的规律来实现对高度的测量。先测出无人机当前所处的大气压值,利用大气压和海拔高度的对应关系再经过转换得到无人机当前飞行高度值。
3.3.3、超声波测距传感器
该模块通过收发超声波和计算时间间隔的方式实现测距功能。有3.3V和5.0V的两种供电电压,与外设通信有GPIO、串口等方式。只需外接电源,接收脚和发送脚分别连接相应的控制器即可开始工作。
数据传输:使用数传电台或GSM进行数据传输或者用数据线进行传输,利用数据线将飞控系统硬件平台和地面软件相连接,使两者建立起通信。
定位模块使用的是全球定位系统GPS选用的GPS模块是ALIENTEK系列的ATK-S1216,该模块同外部设备的通信接口采用UART(串口)方式,可通过串口总线接口与主控芯片之间进行数据传输,其定位精度可达15米。输出的GPS/BD定位数据采用NMEA-0183协议(默认),控制协议为Sky Traq协议。模块外观图如图2-9所示,该系列的GPS在正常工作模式下需要5.0V和3.3V两种供电电压,其中5.0V电压给有源天线供电,3.3V电压给GPS模块供电。
3.5、舵机驱动模块
在飞控系统中,舵机是飞行的执行机构,无人机在空中的俯仰、横滚等一系列飞行动作就是通过舵机驱动舵面的偏转来实现的。
选用Micro Servo-SG90型号的舵机,SG90舵机以周期为20ms的脉宽调制(PWM)作为其控制信号。当脉冲宽度从0.5ms~2.5ms变化时,相对应舵机输出轴的转角从0~180度对应变化,且呈线性关系。具体来讲,控制计算处理器将传感器模块采集的数据进行处理和控制率解算后计算出控制量得到舵机偏转角,调整PWM波占空比后输出到舵机执行机构,舵机的输出轴经偏转后保持在一定角度位置。此时外界转矩的变化不会引起输出轴位置角度的改变,通过修改占空比给其提供一个不同宽度的脉冲信号时,舵机才会改变输出轴角度驱动舵面的偏转到一定位置,通过舵面偏转无人机在空中便可作出俯仰、横滚等一系列飞行动作。
我有一个模型:classItem项目有一个属性“商店”基于存储的值,我希望Item对象对特定方法具有不同的行为。Rails中是否有针对此的通用设计模式?如果方法中没有大的if-else语句,这是如何干净利落地完成的? 最佳答案 通常通过Single-TableInheritance. 关于ruby-on-rails-Rails-子类化模型的设计模式是什么?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.co
我将应用程序升级到Rails4,一切正常。我可以登录并转到我的编辑页面。也更新了观点。使用标准View时,用户会更新。但是当我添加例如字段:name时,它不会在表单中更新。使用devise3.1.1和gem'protected_attributes'我需要在设备或数据库上运行某种更新命令吗?我也搜索过这个地方,找到了许多不同的解决方案,但没有一个会更新我的用户字段。我没有添加任何自定义字段。 最佳答案 如果您想允许额外的参数,您可以在ApplicationController中使用beforefilter,因为Rails4将参数
电脑0x0000001A蓝屏错误怎么U盘重装系统教学分享。有用户电脑开机之后遇到了系统蓝屏的情况。系统蓝屏问题很多时候都是系统bug,只有通过重装系统来进行解决。那么蓝屏问题如何通过U盘重装新系统来解决呢?来看看以下的详细操作方法教学吧。 准备工作: 1、U盘一个(尽量使用8G以上的U盘)。 2、一台正常联网可使用的电脑。 3、ghost或ISO系统镜像文件(Win10系统下载_Win10专业版_windows10正式版下载-系统之家)。 4、在本页面下载U盘启动盘制作工具:系统之家U盘启动工具。 U盘启动盘制作步骤: 注意:制作期间,U盘会被格式化,因此U盘中的重要文件请注
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
项目介绍随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱小学生兴趣延时班预约小程序的设计与开发被用户普遍使用,为方便用户能够可以随时进行小学生兴趣延时班预约小程序的设计与开发的数据信息管理,特开发了小程序的设计与开发的管理系统。小学生兴趣延时班预约小程序的设计与开发的开发利用现有的成熟技术参考,以源代码为模板,分析功能调整与小学生兴趣延时班预约小程序的设计与开发的实际需求相结合,讨论了小学生兴趣延时班预约小程序的设计与开发的使用。开发环境开发说明:前端使用微信微信小程序开发工具:后端使用ssm:VU
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
我在我的项目中有一个用户和一个管理员角色。我使用Devise创建了身份验证。在我的管理员角色中,我没有任何确认。在我的用户模型中,我有以下内容:devise:database_authenticatable,:confirmable,:recoverable,:rememberable,:trackable,:validatable,:timeoutable,:registerable#Setupaccessible(orprotected)attributesforyourmodelattr_accessible:email,:username,:prename,:surname,:
因为我现在正在做一些时间测量,我想知道是否可以在不使用Benchmark类或命令行实用程序time的情况下测量用户时间或系统时间。使用Time类只显示挂钟时间,而不显示系统和用户时间,但是我正在寻找具有相同灵active的解决方案,例如time=TimeUtility.now#somecodeuser,system,real=TimeUtility.now-time原因是我有点不喜欢Benchmark,因为它不能只返回数字(编辑:我错了-它可以。请参阅下面的答案。)。当然,我可以解析输出,但感觉不对。*NIX系统的time实用程序也应该可以解决我的问题,但我想知道是否已经在Ruby中实
在Ruby中,以毫秒为单位获取自纪元(1970)以来的当前系统时间的正确方法是什么?我试过了Time.now.to_i,好像不是我想要的结果。我需要结果显示毫秒并且使用long类型,而不是float或double。 最佳答案 (Time.now.to_f*1000).to_iTime.now.to_f显示包含十进制数字的时间。要获得毫秒数,只需将时间乘以1000。 关于ruby-以毫秒为单位获取当前系统时间,我们在StackOverflow上找到一个类似的问题: