新学期第一天开始写的这篇文章,看看我啥时候能把他发出去。假期当然是啥也没干了,之前还信誓旦旦说回家一定能学习,学个毛线。开始学习啦,去年年末把环境配置好了之后,实验发现他不准,用的D435i摄像头是红外的,在水里误差太大,所以最终目地的话就是要给他整准,这脑子一天天啥也不记得,真想去测一个记忆力,看看是不是有问题...首先的话学习一下基础的摄像头的成像原理~
双目立体视觉深度相机的深度测量过程,如下:
1、标定:首先需要对双目相机进行标定,得到两个相机的内外参数、单应矩阵。
2)校正:根据标定结果对原始图像校正,校正后的两张图像位于同一平面且互相平行。
3)找像素点:对校正后的两张图像进行像素点匹配。
4)深度:根据匹配结果计算每个像素的深度,从而获得深度图。
目录
2.1世界坐标系和相机坐标系之间的转换(刚体变换:物体不会发生形变,只需要进行旋转和平移)
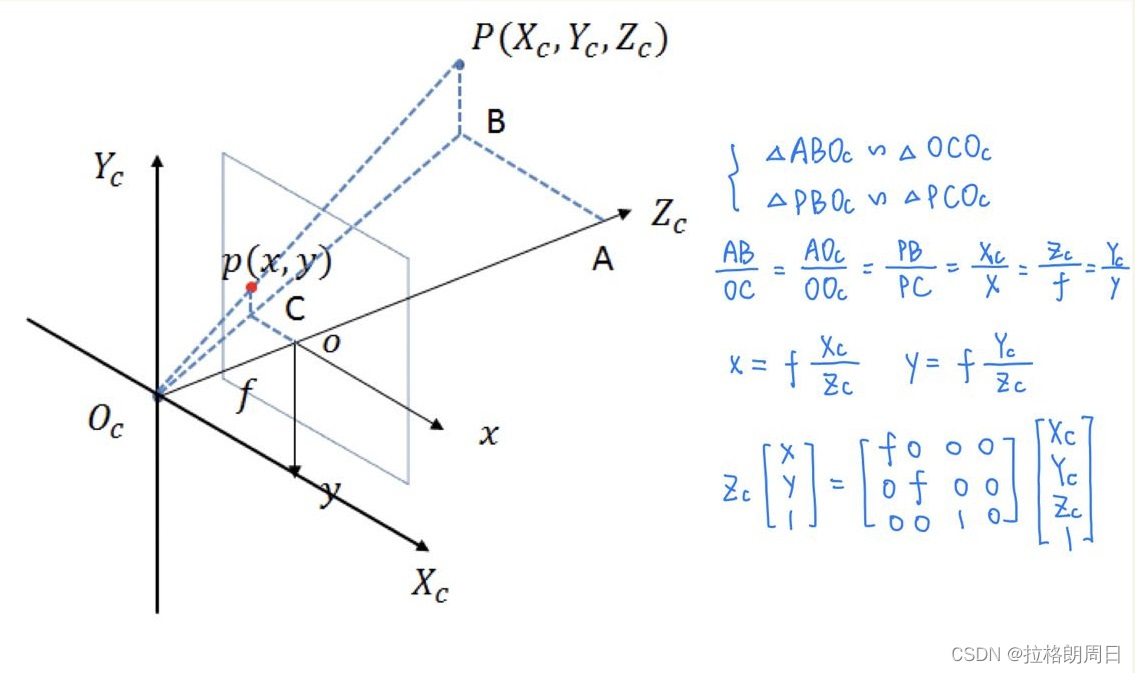
2.2相机坐标系(Oc)与图像坐标系(Ox-y)之间的转换(透视投影:从3D转换到2D)
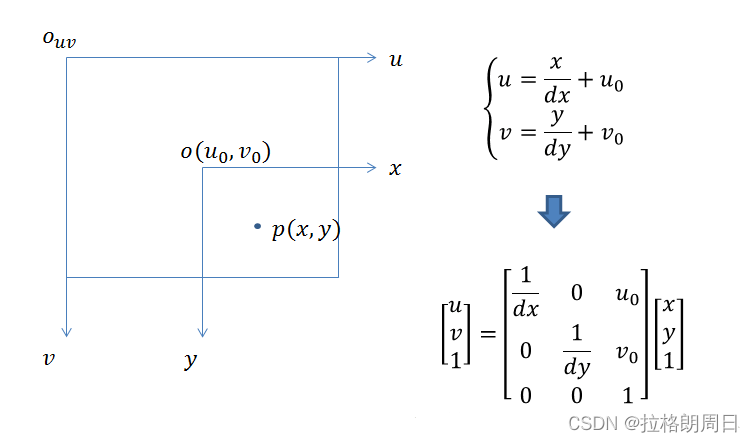
2.3图像坐标系(Ox-y)与像素坐标系(Ou-v)(仿射变换)
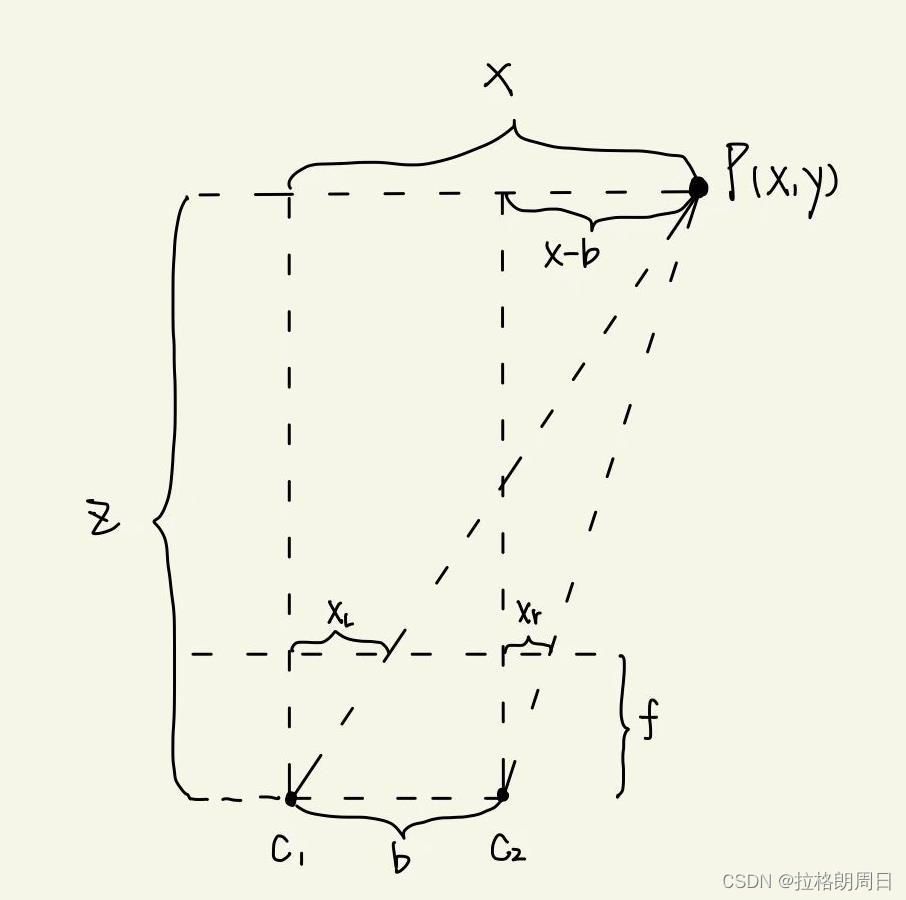
c1、c2是左右两个双目相机(位置对齐)。相机焦距f,相机之间距离为b,右上角为目标位置P(x,y),目标的水平坐标为x,相机离目标垂直距离(所求目标距离相机的深度)为z。
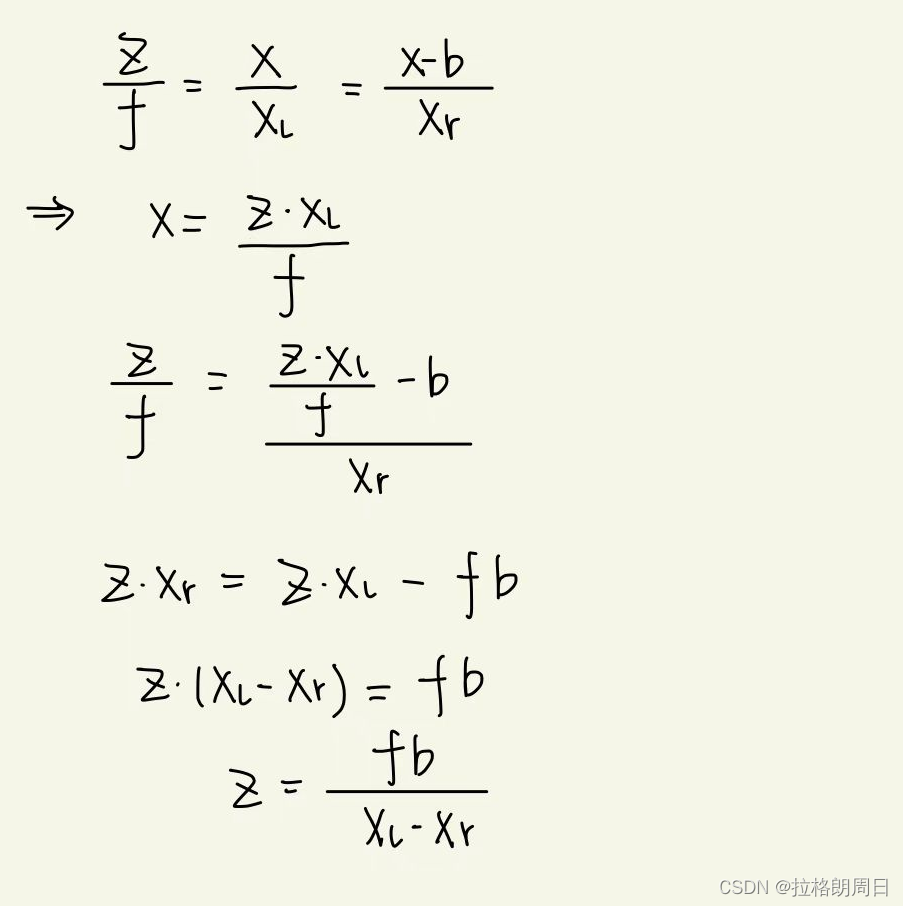
如果要计算深度z,必须要知道:
(1)相机焦距f,左右相机之间距离b。这些参数可以通过先验信息或者相机标定得到。
(2)视差d。需要知道左相机的每个像素点(xl, yl)和右相机中对应点(xr, yr)的对应关系。这是双目视觉的核心问题。
想标定得先成像,所以先来搞清楚相机是如何成像滴
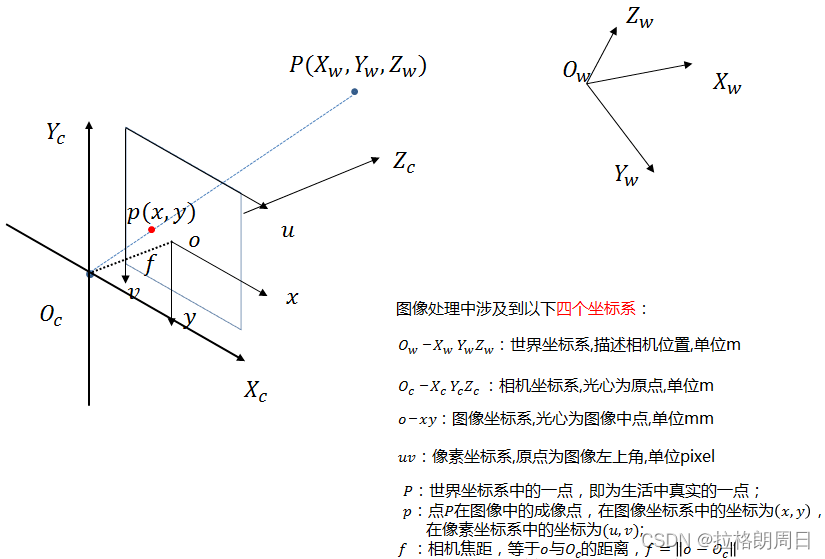
相机成像系统中,共包含四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。
世界坐标系:描述目标物体在真实世界的位置而引入的三维世界坐标系。
相机坐标系:以相机为中心,从相机角度描述物体位置,作为像素坐标系—世界坐标系的桥梁。
图像坐标系:描述真实物体在相机焦距处成像的坐标系,用来连接相机坐标系与像素坐标系。
像素坐标系:描述物体在照片上数字图像的位置而引入的一种数字坐标系。
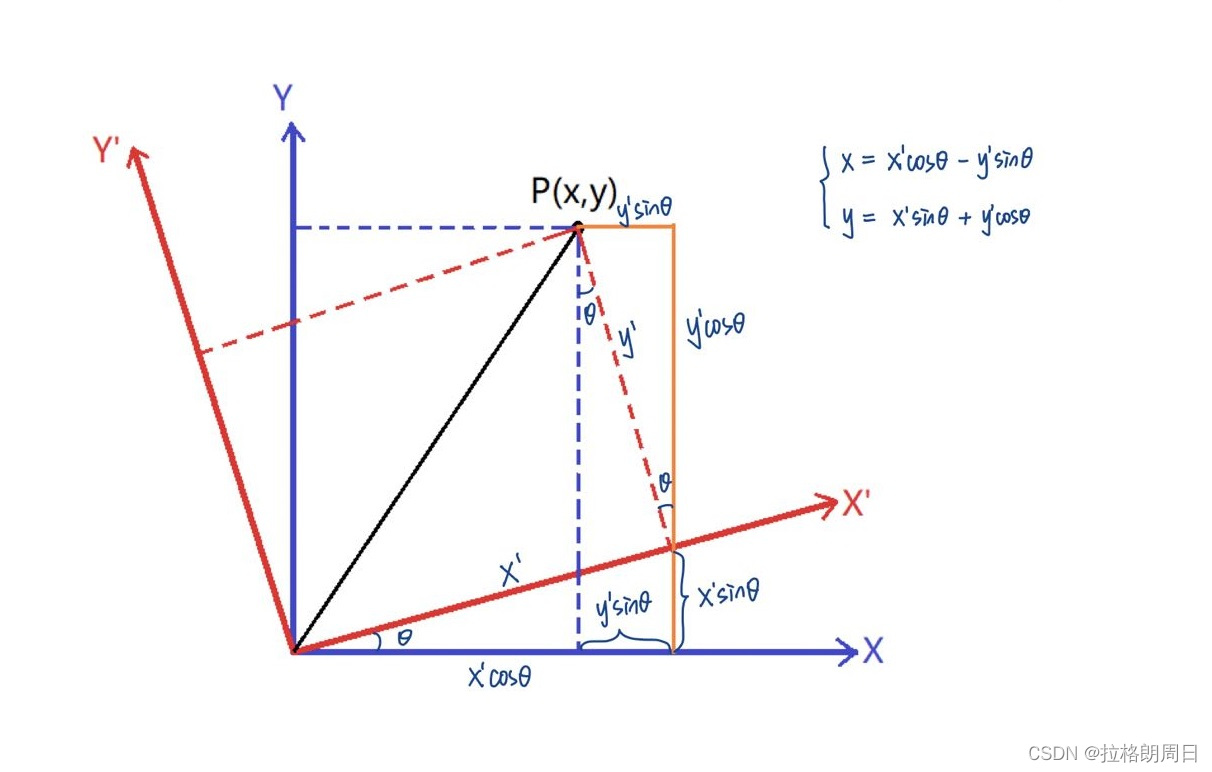
从一个坐标系到另一个坐标系,物体之间的坐标系变换都可以表示坐标系的旋转变换加上平移变换。
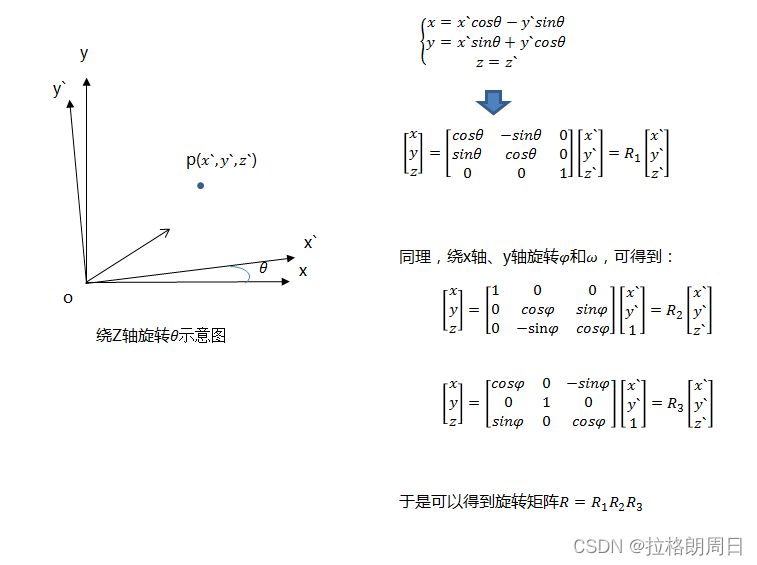
为啥向上面那样写呢:以绕Z轴旋转为例
如下图,绕Z转,Z不变,我们把三维转为二维,根据几何关系就可以得到,其他两个也一样。
 原理知道了以后,我们看这四个坐标系如何变换,由现实中的物体最后在图像中成像
原理知道了以后,我们看这四个坐标系如何变换,由现实中的物体最后在图像中成像
世界坐标系相机坐标系
图像坐标系
像素坐标系
如下图,R表示旋转矩阵,T表示偏移变量

说白了就是用,
,
来表示x,y,下图为理想的图像坐标系,实际会产生畸变,需要矫正。
像素坐标系和图像坐标系都在成像平面上,但是原点所在位置不同,单位不同。图像坐标系的原点为相机光轴与成像平面的交点(上图点o),通常情况下是成像平面的中点,图像坐标系的单位是mm,而像素坐标系的原点在图像左上角(本文第三张图上有画),单位是pixel。
2.3.1两坐标轴都为直角坐标系(uv垂直)
图像上的每点坐标 (u,v) 分别表示每一帧采集的图像在系统中的存储的数组的列数与行数,坐标 (u,v) 所对应的值就是该点的灰度信息。设点o在图像像素坐标系中记为 (u0,v0) ,每个像素沿 x 轴的实际物理尺寸大小是 dx,沿 y 轴的实际物理尺寸大小是dy ,单位值mm,即1pixel=dx mm。则能得到两个坐标系间的关系式 。
2.3.2两坐标轴有一个轴平行,一个轴不平行
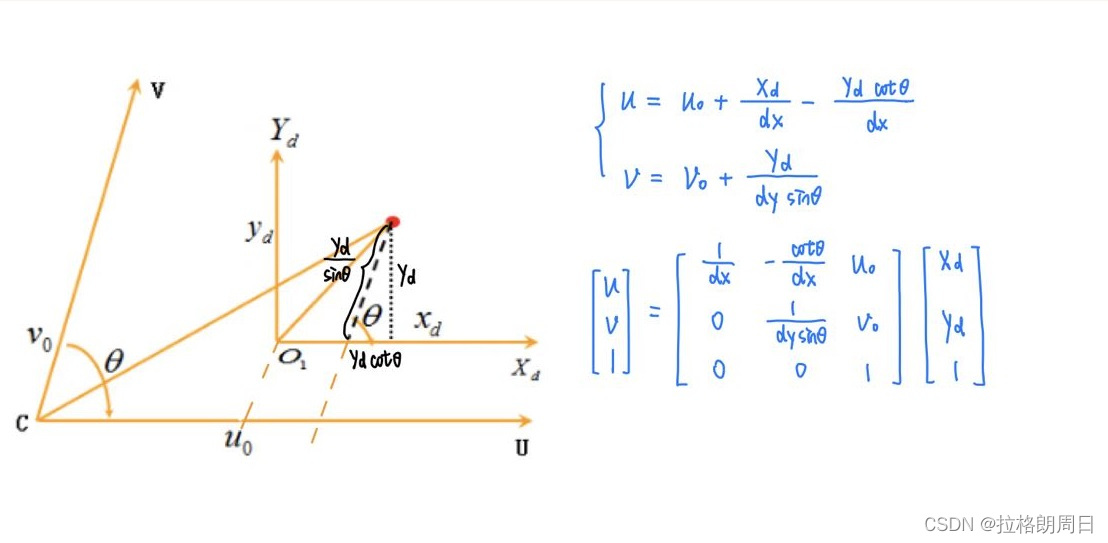
三个穿起来就变成了:
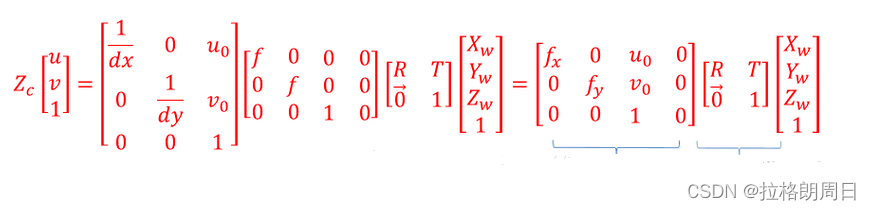
其中,Xw,Yw,Zw为在世界坐标系下一点的物理坐标,u,v为该点对应的在像素坐标系下的像素坐标,Zc为尺度因子。最右边等式的第一个是相机的内参,内参矩阵取决于相机的内部参数。其中, f为像距,dx,dy分别表示X,Y方向上的一个像素在相机感光板上的物理长度(即一个像素在感光板上是多少毫米),u0,v0分别表示相机感光板中心在像素坐标系下的坐标,表示感光板的横边和纵边之间的角度(90度表示无误差)。第二是相机的外参,外参矩阵取决于相机坐标系和世界坐标系的相对位置,R表示旋转矩阵,T表示平移矢量。
下一篇我们就看一下啥叫标定。
我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
在Cooper的书BeginningRuby中,第166页有一个我无法重现的示例。classSongincludeComparableattr_accessor:lengthdef(other)@lengthother.lengthenddefinitialize(song_name,length)@song_name=song_name@length=lengthendenda=Song.new('Rockaroundtheclock',143)b=Song.new('BohemianRhapsody',544)c=Song.new('MinuteWaltz',60)a.betwee
我有一个rubyonrails应用程序。我按照facebook的说明添加了一个像素。但是,要跟踪转化,Facebook要求您将页面置于达到预期结果时出现的转化中。即,如果我想显示客户已注册,我会将您注册后转到的页面作为成功对象进行跟踪。我的问题是,当客户注册时,在我的应用程序中没有登陆页面。该应用程序将用户带回主页。它在主页上显示了一条消息,所以我想看看是否有一种方法可以跟踪来自Controller操作而不是实际页面的转化。我需要计数的Action没有页面,它们是ControllerAction。是否有任何人都知道的关于如何执行此操作的gem、文档或最佳实践?这是进入布局文件的像素
我正在检查一个Rails项目。在ERubyHTML模板页面上,我看到了这样几行:我不明白为什么不这样写:在这种情况下,||=和ifnil?有什么区别? 最佳答案 在这种特殊情况下没有区别,但可能是出于习惯。每当我看到nil?被使用时,它几乎总是使用不当。在Ruby中,很少有东西在逻辑上是假的,只有文字false和nil是。这意味着像if(!x.nil?)这样的代码几乎总是更好地表示为if(x)除非期望x可能是文字false。我会将其切换为||=false,因为它具有相同的结果,但这在很大程度上取决于偏好。唯一的缺点是赋值会在每次运行
我有带有Logo图像的公司模型has_attached_file:logo我用他们的Logo创建了许多公司。现在,我需要添加新样式has_attached_file:logo,:styles=>{:small=>"30x15>",:medium=>"155x85>"}我是否应该重新上传所有旧数据以重新生成新样式?我不这么认为……或者有什么rake任务可以重新生成样式吗? 最佳答案 参见Thumbnail-Generation.如果rake任务不适合你,你应该能够在控制台中使用一个片段来调用重新处理!关于相关公司
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
我正在尝试使用Ruby2.0.0和Rails4.0.0提供的API从imgur中提取图像。我已尝试按照Ruby2.0.0文档中列出的各种方式构建http请求,但均无济于事。代码如下:require'net/http'require'net/https'defimgurheaders={"Authorization"=>"Client-ID"+my_client_id}path="/3/gallery/image/#{img_id}.json"uri=URI("https://api.imgur.com"+path)request,data=Net::HTTP::Get.new(path
2022/8/4更新支持加入水印水印必须包含透明图像,并且水印图像大小要等于原图像的大小pythonconvert_image_to_video.py-f30-mwatermark.pngim_dirout.mkv2022/6/21更新让命令行参数更加易用新的命令行使用方法pythonconvert_image_to_video.py-f30im_dirout.mkvFFMPEG命令行转换一组JPG图像到视频时,是将这组图像视为MJPG流。我需要转换一组PNG图像到视频,FFMPEG就不认了。pyav内置了ffmpeg库,不需要系统带有ffmpeg工具因此我使用ffmpeg的python包装p
📢博客主页:https://blog.csdn.net/weixin_43197380📢欢迎点赞👍收藏⭐留言📝如有错误敬请指正!📢本文由Loewen丶原创,首发于CSDN,转载注明出处🙉📢现在的付出,都会是一种沉淀,只为让你成为更好的人✨文章预览:一.分辨率(Resolution)1、工业相机的分辨率是如何定义的?2、工业相机的分辨率是如何选择的?二.精度(Accuracy)1、像素精度(PixelAccuracy)2、定位精度和重复定位精度(RepeatPrecision)三.公差(Tolerance)四.课后作业(Post-ClassExercises)视觉行业的初学者,甚至是做了1~2年
有这样的事吗?我想在Ruby程序中使用它。 最佳答案 试试这个http://csl.sublevel3.org/jp2a/此外,Imagemagick可能还有一些东西 关于ruby-是否有将图像文件转换为ASCII艺术的命令行程序或库?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/6510445/