之前完成了利用OpenGL实现GPU体渲染的实验,现在把完成的工作做一个总结。
本实验demo的完成主要参考了《OpenGL – Build high performance graphics》这本书的体渲染部分和其中的代码,也参考了体绘制光线投射算法这篇博客。关于体渲染的ray-casting光线投射算法原理这里不再介绍,本文主要讲述实现过程。
以下是具体实现过程:
体数据可视化如图所示,产生体数据的代码如下:
int Dim[3] = { 200,200,200 };//体数据维度大小
int* Data = (int*)malloc(sizeof(int) * Dim[0] * Dim[1] * Dim[2]);
GLubyte CData[200][200][200][4];//存储颜色和不透明度
glm::vec4 smallCubeC = glm::vec4(1.0, 1.0, 0.0, 1.0);//小立方体颜色
glm::vec4 middleSphereC = glm::vec4(1.0, 0.0, 0.0, 1.0);//中间球体颜色
glm::vec4 largeCubeC = glm::vec4(1.0, 1.0, 1.0, 1.0);//大立方体颜色
float smallCubeD = 0.05;//小立方体不透明度
float middleSphereD = 0.015;//中间球体不透明度
float largeCubeD = 0.018;//大立方体不透明度
void GenCube(int x, int y, int z, int side, int density, int* Data, int* Dim)
{
int max_x = x + side, max_y = y + side, max_z = z + side;
int Dimxy = Dim[0] * Dim[1];
for (int k = z; k < max_z; k++)
{
for (int j = y; j < max_y; j++)
{
for (int i = x; i < max_x; i++)
{
Data[k * Dimxy + j * Dim[0] + i] = density;
}
}
}
}
void GenSphere(int x, int y, int z, int radius, int density, int* Data, int* Dim)
{
int radius2 = radius * radius;
int Dimxy = Dim[0] * Dim[1];
for (int k = 0; k < Dim[2]; k++)
{
for (int j = 0; j < Dim[1]; j++)
{
for (int i = 0; i < Dim[0]; i++)
{
if ((i - x) * (i - x) + (j - y) * (j - y) + (k - z) * (k - z) <= radius2)
{
Data[k * Dimxy + j * Dim[0] + i] = density;
}
}
}
}
}
void Classify(GLubyte CData[200][200][200][4], int* Data, int* Dim)//按照所在位置为每个体数据点赋值,颜色和不透明度
{
int* LinePS = Data;
for (int k = 0; k < Dim[2]; k++)
{
for (int j = 0; j < Dim[1]; j++)
{
for (int i = 0; i < Dim[0]; i++)
{
if (LinePS[0] <= 100)
{
//白色
CData[i][j][k][0] = 255.0 * largeCubeC[0];
CData[i][j][k][1] = 255.0 * largeCubeC[1];
CData[i][j][k][2] = 255.0 * largeCubeC[2];
CData[i][j][k][3] = largeCubeD*255.0;
}
else if (LinePS[0] <= 200)
{
//红色
CData[i][j][k][0] = 255.0 * middleSphereC[0];
CData[i][j][k][1] = 255.0 * middleSphereC[1];
CData[i][j][k][2] = 255.0 * middleSphereC[2];
CData[i][j][k][3] = middleSphereD*255.0;
}
else
{
//黄色
CData[i][j][k][0] = 255.0 * smallCubeC[0];
CData[i][j][k][1] = 255.0 * smallCubeC[1];
CData[i][j][k][2] = 255.0 * smallCubeC[2];
CData[i][j][k][3] = smallCubeD*255.0;
}
LinePS++;
}
}
}
//return CDdata[200][200][200][4];
}
void GenerateVolume(int* Data, int* Dim)
{
GenCube(0, 0, 0, 200, 100, Data, Dim);//大正方体
GenSphere(100, 100, 100, 80, 200, Data, Dim);//球体
GenCube(70, 70, 70, 60, 300, Data, Dim);//小正方体
}
手动生成的体数据会更有利于理解光线投射算法体渲染的原理,该体数据本质上就是200x200x200个点,每个点赋予了对应的颜色值和不透明度。
为了在着色器中实现ray-casting光线投射,合成像素值,需要将体数据存入三维纹理中,然后传入到着色器。
//volume texture ID
GLuint textureID;
bool LoadVolume() {
GenerateVolume(Data, Dim);//生成原始体数据
Classify(CData, Data, Dim);//对体数据分类赋予对应颜色值和不透明度
//generate OpenGL texture
glGenTextures(1, &textureID);
glBindTexture(GL_TEXTURE_3D, textureID);
// set the texture parameters
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_WRAP_S, GL_CLAMP);
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_WRAP_T, GL_CLAMP);
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_WRAP_R, GL_CLAMP);
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_MAG_FILTER, GL_LINEAR);
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_MIN_FILTER, GL_LINEAR_MIPMAP_LINEAR);
//set the mipmap levels (base and max)
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_BASE_LEVEL, 0);
glTexParameteri(GL_TEXTURE_3D, GL_TEXTURE_MAX_LEVEL, 4);
glTexImage3D(GL_TEXTURE_3D, 0, GL_RGBA, 200, 200, 200, 0, GL_RGBA, GL_UNSIGNED_BYTE, CData);//将体数据存入3D纹理
GL_CHECK_ERRORS
//generate mipmaps
glGenerateMipmap(GL_TEXTURE_3D);
return true;
}
将体数据存入3D纹理后就可以在着色器中接收此3D纹理,然后利用坐标采样获得采样点的rgb和不透明度。
接下来如果想要在着色器中实现光线投射算法,就需要能够根据位置坐标获得3D纹理对应坐标的颜色值和不透明度。一个不错的解决办法是构造一个1x1x1的单位立方体包围盒,将3D纹理坐标(范围0~1)映射与立方体坐标对应上,也就是映射。这样就可以通过着色器的内置变量片元坐标position,获取到对应位置坐标的3d纹理颜色和不透明度,然后沿着光线投射方向步进采样合成颜色值。
以下是相关的代码,省略了绘制立方体的部分。由于这里我绘制的立方体是xyz值范围(-0.5~0.5)的立方体,所以要与3D纹理坐标映射,需要做一个变换,即用于采样3D纹理的坐标vUV需要由片元位置坐标加上0.5得到,下面是完成这个映射过程的顶点着色器代码。
#version 330 core
layout(location = 0) in vec3 vVertex; //object space vertex position
//uniform
uniform mat4 MVP;
smooth out vec3 vUV;
void main()
{
gl_Position = MVP*vec4(vVertex.xyz,1);
vUV = vVertex + vec3(0.5);
}
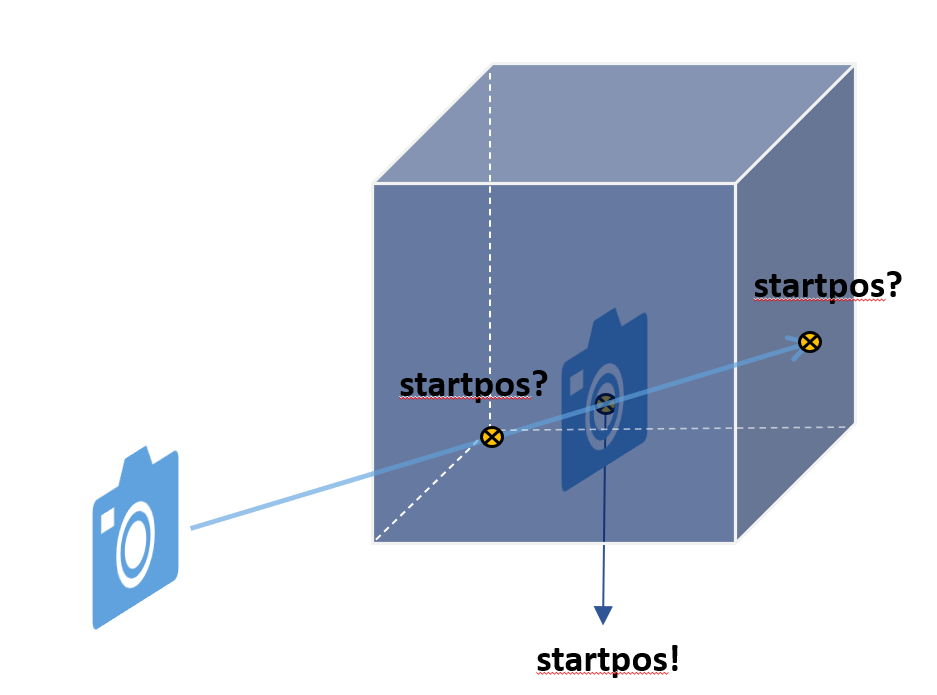
下面是片元着色器的代码,实现了光线投射算法。需要注意的是步进起始点,当视点位于体渲染外的时候,起始点是着色器内部获取的立方体表面的坐标,这是正确的,而当视点移动到体渲染对象的内部观察时,这个起始点就不对了,这时的起始点不应该在立方体表面,而应该以视点作为起始点往视线方向采样,如下图所示。所以需要加一个判断条件,判断视点是否在立方体包围盒内部。
下面是完整的片元着色器代码
#version 330 core
layout(location = 0) out vec4 vFragColor; //fragment shader output
smooth in vec3 vUV; //用于采样3D纹理的坐标
uniform sampler3D volume; //体数据纹理
uniform vec3 camPos; //相机位置
uniform vec3 step_size; //采样步长
//constants
const int MAX_SAMPLES = 300;
const vec3 texMin = vec3(0); //最小纹理坐标
const vec3 texMax = vec3(1); //最大纹理坐标
void main()
{
vec3 dataPos = vUV; //光线投射起始点坐标
vec3 geomDir; //光线步进方向
if(abs(camPos.x)<=0.5&&abs(camPos.y)<=0.5&&abs(camPos.z)<=0.5)//当相机也就是视点位于体渲染对象内部时,起始点应该改为相机视点的位置坐标作为起始点
{
dataPos=camPos+vec3(0.5);
}
geomDir = normalize((vUV-vec3(0.5)) - camPos); //由视点坐标和起始点坐标相减得到沿视线方向步进的方向的向量
vec3 dirStep = geomDir * step_size;
bool stop = false;
vec4 cumc=vec4(0);
//沿射线方向采样累积颜色和不透明度
for (int i = 0; i < MAX_SAMPLES; i++) {
dataPos = dataPos + dirStep;
stop = dot(sign(dataPos-texMin),sign(texMax-dataPos)) < 3.0;
if (stop)
break;
vec4 samplec=texture(volume, dataPos).rgba;//获取采样点颜色值和不透明度
cumc[0]+=samplec.r*samplec[3]*(1-cumc[3]);
cumc[1]+=samplec.g*samplec[3]*(1-cumc[3]);
cumc[2]+=samplec.b*samplec[3]*(1-cumc[3]);
cumc[3]+=samplec.a*(1-cumc[3]);
if( cumc[3]>0.99)
break;
}
vFragColor=cumc.rgba;
}
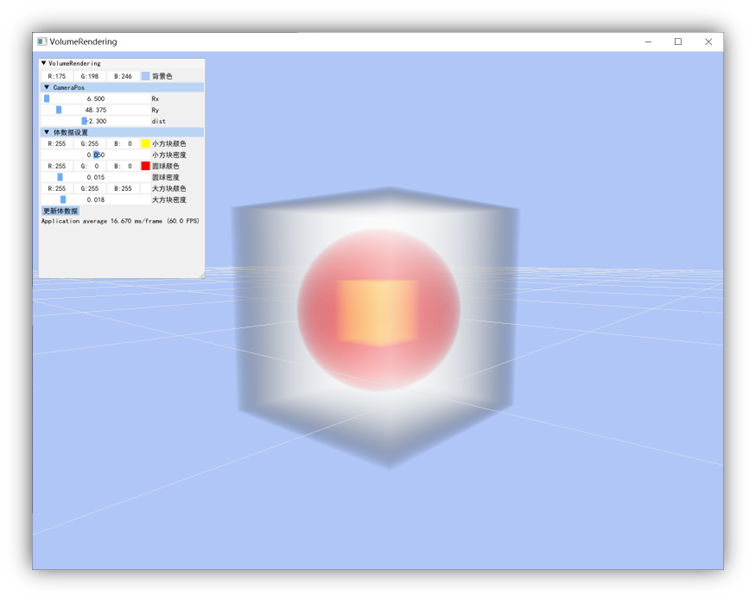
最终实现的效果如图所示,为了方便调试,利用imgui添加了一个简单的GUI界面

这个案例应该会对理解体渲染和GPU实现体渲染有所帮助。
我想要做的是有2个不同的Controller,client和test_client。客户端Controller已经构建,我想创建一个test_clientController,我可以使用它来玩弄客户端的UI并根据需要进行调整。我主要是想绕过我在客户端中内置的验证及其对加载数据的管理Controller的依赖。所以我希望test_clientController加载示例数据集,然后呈现客户端Controller的索引View,以便我可以调整客户端UI。就是这样。我在test_clients索引方法中试过这个:classTestClientdefindexrender:template=>
在我的Controller中,我通过以下方式在我的index方法中支持HTML和JSON:respond_todo|format|format.htmlformat.json{renderjson:@user}end在浏览器中拉起它时,它会自然地以HTML呈现。但是,当我对/user资源进行内容类型为application/json的curl调用时(因为它是索引方法),我仍然将HTML作为响应。如何获取JSON作为响应?我还需要说明什么? 最佳答案 您应该将.json附加到请求的url,提供的格式在routes.rb的路径中定义。这
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
通常,数组被实现为内存块,集合被实现为HashMap,有序集合被实现为跳跃列表。在Ruby中也是如此吗?我正在尝试从性能和内存占用方面评估Ruby中不同容器的使用情况 最佳答案 数组是Ruby核心库的一部分。每个Ruby实现都有自己的数组实现。Ruby语言规范只规定了Ruby数组的行为,并没有规定任何特定的实现策略。它甚至没有指定任何会强制或至少建议特定实现策略的性能约束。然而,大多数Rubyist对数组的性能特征有一些期望,这会迫使不符合它们的实现变得默默无闻,因为实际上没有人会使用它:插入、前置或追加以及删除元素的最坏情况步骤复
在ruby中,你可以这样做:classThingpublicdeff1puts"f1"endprivatedeff2puts"f2"endpublicdeff3puts"f3"endprivatedeff4puts"f4"endend现在f1和f3是公共(public)的,f2和f4是私有(private)的。内部发生了什么,允许您调用一个类方法,然后更改方法定义?我怎样才能实现相同的功能(表面上是创建我自己的java之类的注释)例如...classThingfundeff1puts"hey"endnotfundeff2puts"hey"endendfun和notfun将更改以下函数定