文章目录
研究动机:在一定的约束条件下达到最优的系统表现。
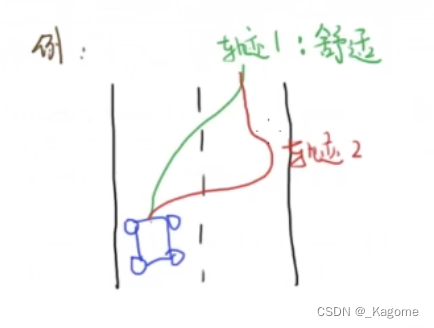
关于最优的,举个车变道的例子,从表面上来看,轨迹1行车轨迹很平滑,很舒适,没有什么急转弯;轨迹2是快速的,但是假如前面有了障碍物,也需要一种快速的紧急避障能力,所以关于最优的,还得分析特定的情况。
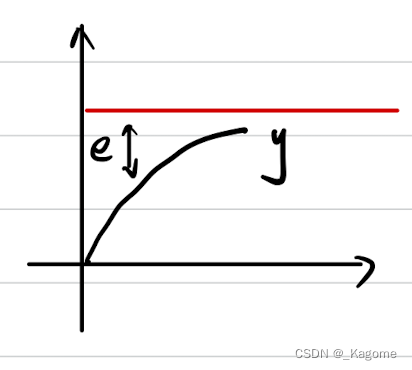
轨迹跟踪的性能表示:
∫
0
t
exp
(
2
)
d
t
\int_{0}^{t} \exp(2)\, dt
∫0texp(2)dt–>其结果越小,追踪的就越好。
(关于为什么采用
e
x
p
(
2
)
exp(2)
exp(2)的解释:误差有正有负,
e
x
p
(
2
)
exp(2)
exp(2)可以把正负误差都统计上,外加绝对值也是可行的。至于为什么是积分结果越小,追踪的就好的解释:控制器在变化,看哪个控制器的误差积分最小,哪个控制器最优)
输入: ∫ 0 t u 2 d t \int_{0}^{t} \ u^2\, dt ∫0t u2dt->积分结果越小,输入越小。
物理条件:能耗最低的,可以用很小的能耗达到所需条件。
所以可以构建一个Cost Function,如 J = ∫ 0 t q e 2 + r u 2 d t J = \int_{0}^{t} \ {qe}^2+{ru}^2\, dt J=∫0t qe2+ru2dt。LQR控制
最优化的过程就是对 u u u进行设计,使得 m i n ( J ) min(J) min(J)。
q
>
>
r
q >> r
q>>r:则说明更看重误差
r
>
>
q
r >> q
r>>q:则说明更看重输入
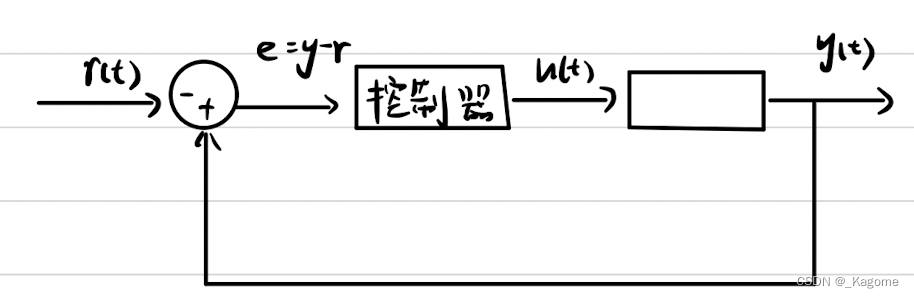
公式太难打了,看我手写图吧。
需要注意的是,上方我写的符号冲突了,
y
1
−
r
1
y_{1} - r_{1}
y1−r1当中的
r
1
r_{1}
r1是参考值(
r
2
r_{2}
r2同理),看上方的控制框图中的
r
r
r。而下方的
u
T
R
u
u^{T}Ru
uTRu中的
r
1
,
r
2
r_{1},r_{2}
r1,r2是调节参数。
通过模型来预测系统在某一未来时间段内的表现来进行优化控制,多用于数位控制。
常用的是离散形式的表达式: X k + 1 = A X k + B u k X_{k+1} = AX_{k} + Bu_{k} Xk+1=AXk+Buk
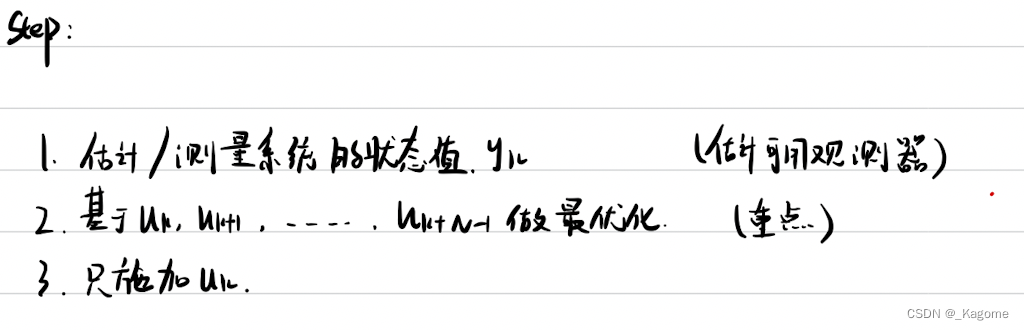
MPC的步骤主要有三步:
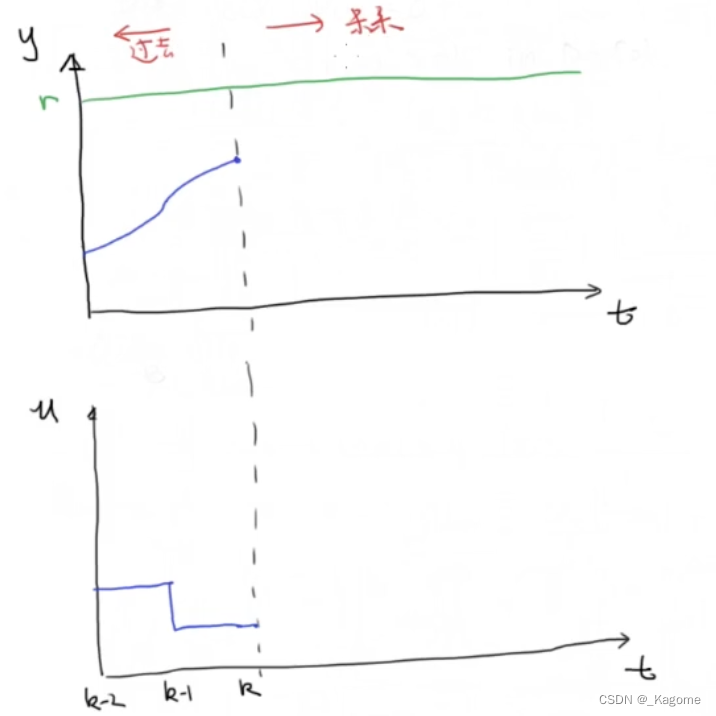
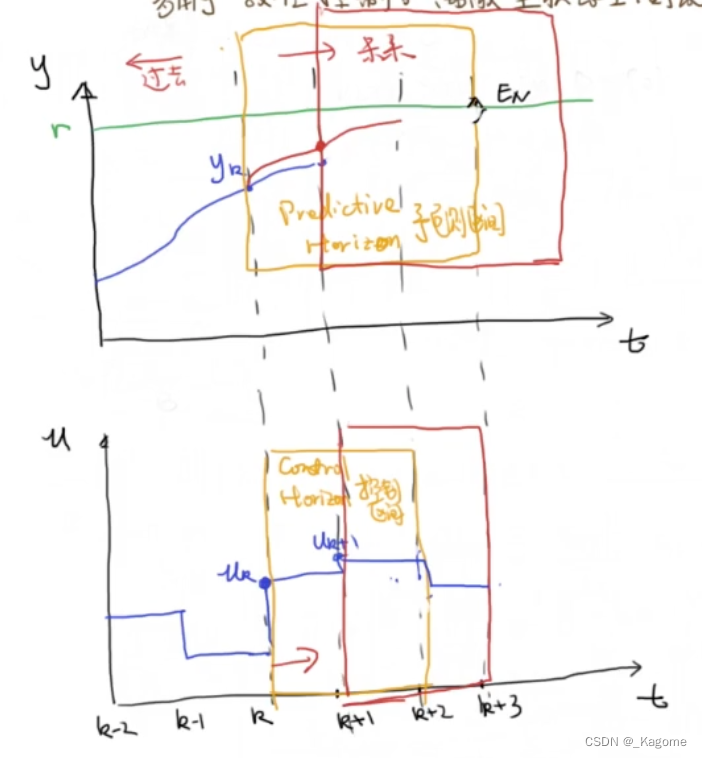
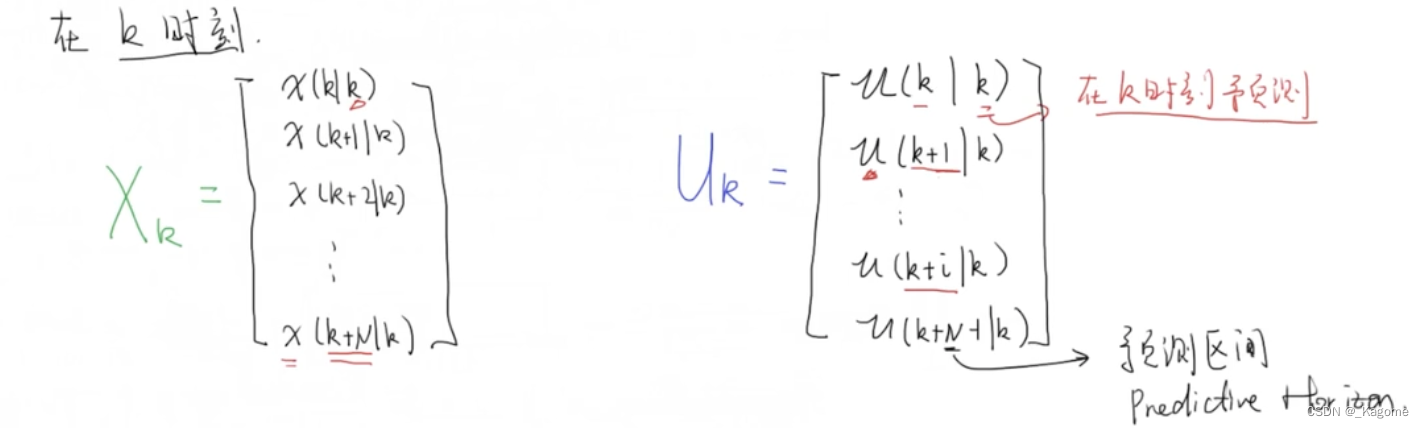
在k时刻:
Step1:估计/测量读取当前系统状态: y k y_k yk
下图中的参数,分别是输入 u u u以及输出 y y y, r r r是其参考值。
Step2:基于 u k , u k + 1 . . . . . . u k + N u_k,u_{k+1}......u_{k+N} uk,uk+1......uk+N来进行最优化可以看出,下方当中的控制区间当中 u k u_k uk等参数的选择,就是一个最优化的过程。
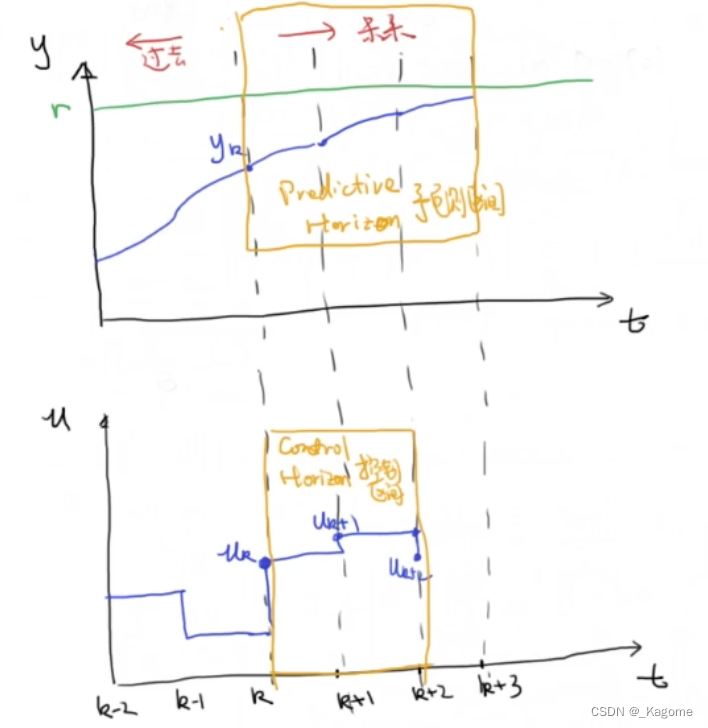
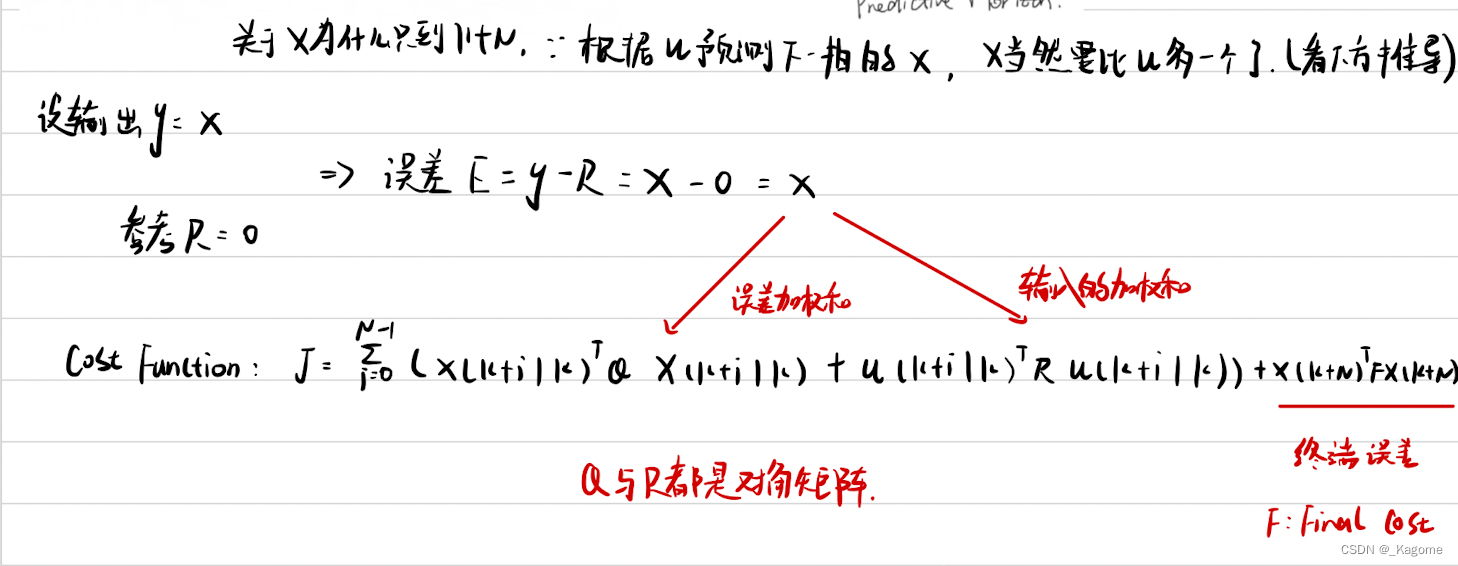
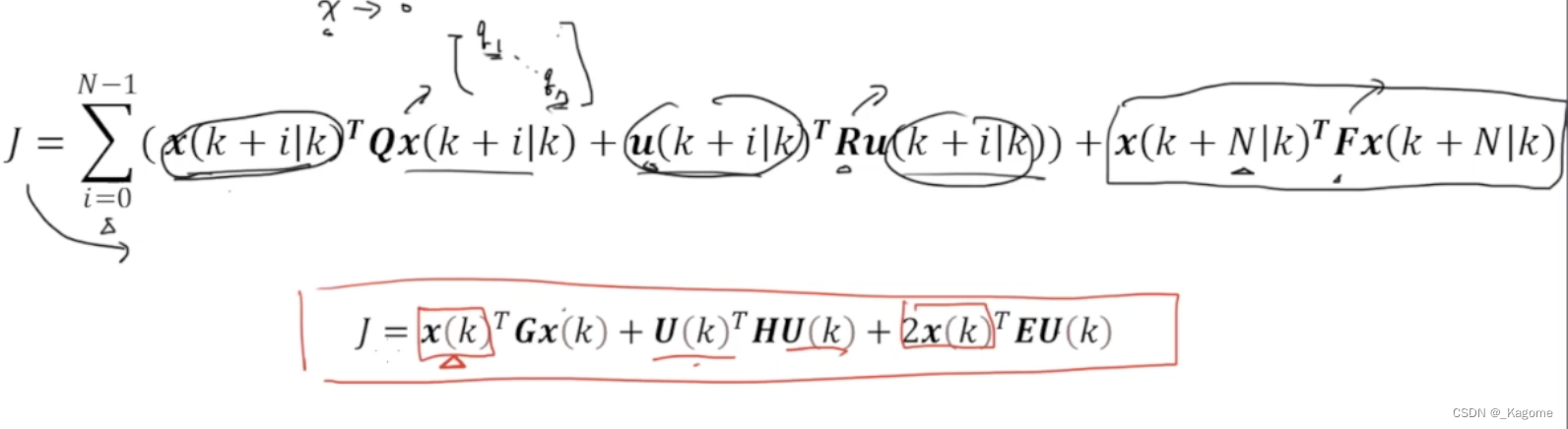
其Cost Function就是如下:
J = ∑ k N − 1 E k T Q E K + u k T R u k + E N T F E N J = \sum\limits_{k}\limits^{N-1}{E_{k}^TQE_{K}+u_{k}^TRu_{k}+E_{N}^TFE_{N}} J=k∑N−1EkTQEK+ukTRuk+ENTFEN
其中最后一项, E N T F E N E_{N}^TFE_{N} ENTFEN代表的是最终时刻的最末一点误差的代价函数。
要做的就是把代价函数最优化找到它的最小值。
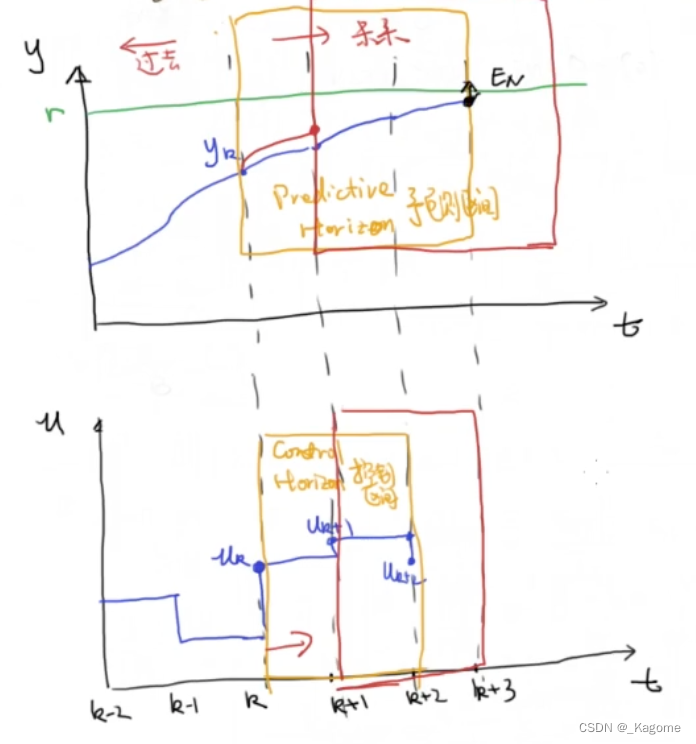
Step3:这一步是最关键的,上方说过了基于 u k , u k + 1 . . . . . . u k + N u_k,u_{k+1}......u_{k+N} uk,uk+1......uk+N来进行最优化,但是在MPC当中,算了这么多,只取 u k u_k uk,看N步走一步的思想,这是因为预测的模型很难完美描述现实当中的系统,在现实当中的系统可能会有扰动。那是不是之前的计算就白算了呢?没有白算,若不计算后面的 u k + 1 u_{k+1} uk+1之类的项目,就无法保证 k k k时刻能达到最优。
例如,你预测的是蓝色线段,但是实际的可能是蓝色线段上方的一个红色线段,有扰动。
进行刚刚的一个轮回选择完
u
k
u_k
uk进行优化后,就是在发现实际有偏差之后,以当前的实际为基础,把之前整个黄色框图整体向未来移动一步,再进行优化设计(之前预测的蓝色线段就不要了)。
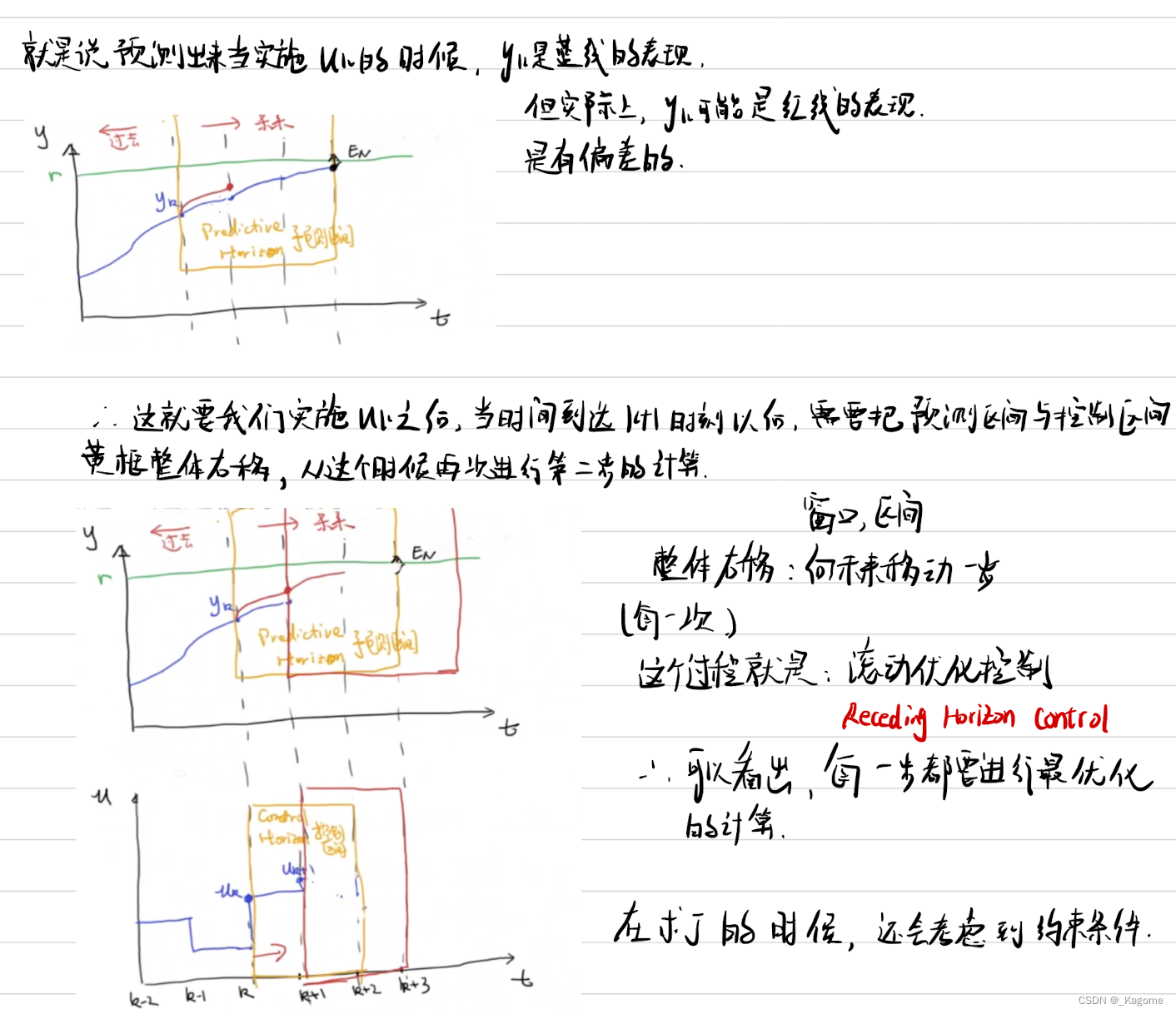
所以MPC对计算性能有要求,因为每一步都要进行最优化的计算。
以下公式太多,采用手写笔记替代,必要时会进行文字说明。
因为二次规划的求解已经非常成熟了(MatLab/Python),所以可以把模型化成这样的一般形式,这样的话就可以扔到里面进行计算了。
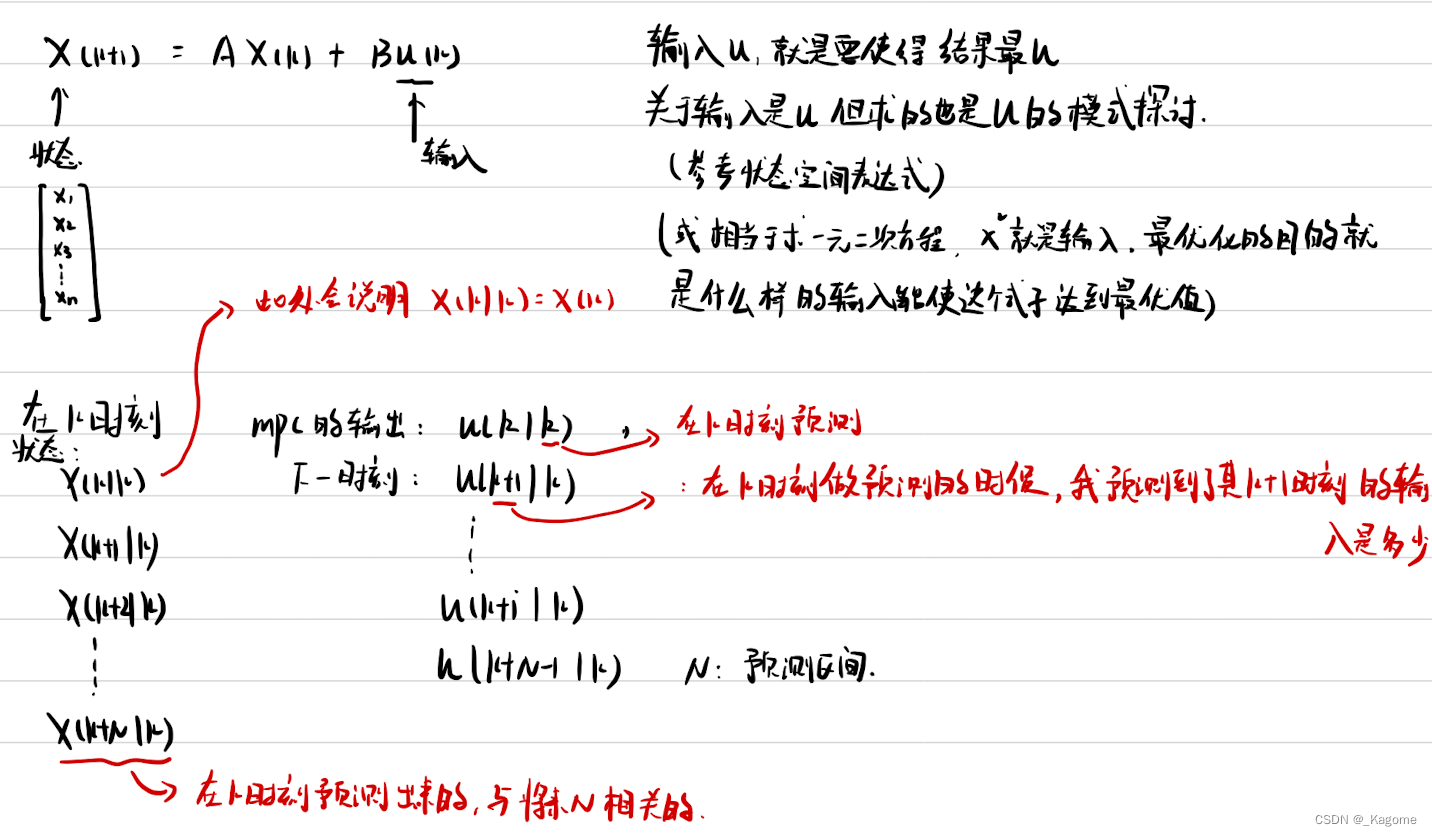
关于为什么是
u
k
+
N
−
1
u_{k+N-1}
uk+N−1而
x
k
+
N
x_{k+N}
xk+N等维度不一致的问题,因为
x
k
+
N
x_{k+N}
xk+N是由
u
k
+
N
−
1
u_{k+N-1}
uk+N−1推出来的,所以少了一个。
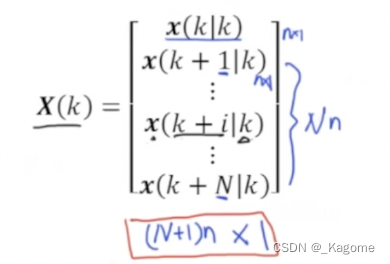
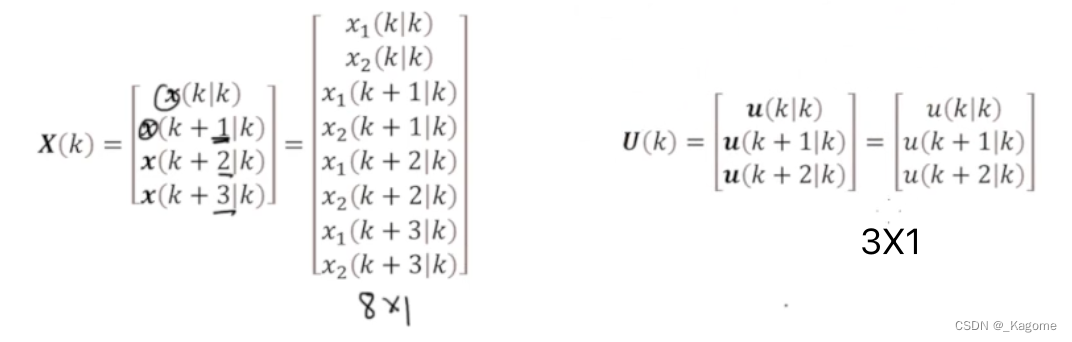
记住这个绿色的 X k X_k Xk以及蓝色的 u k u_k uk。
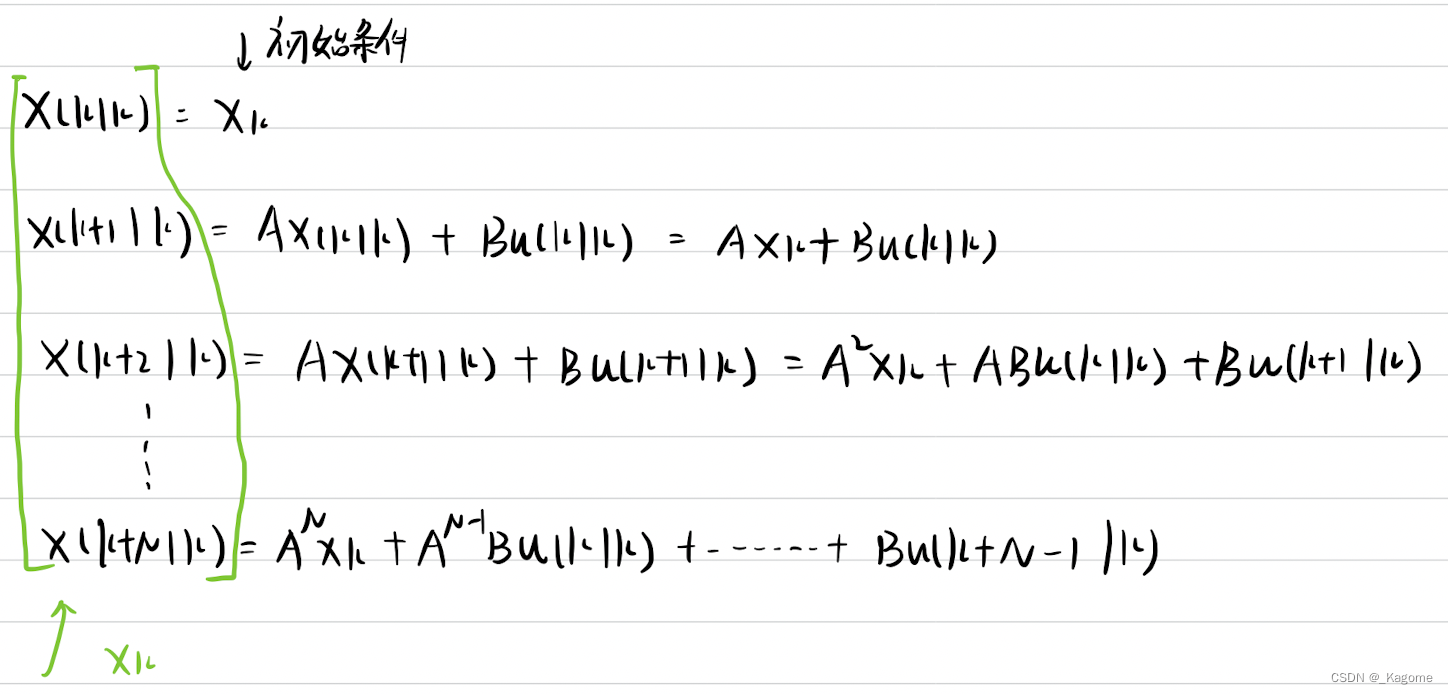
就是将初始条件代入 A X + B U AX+BU AX+BU的方程中,计算出下一时刻后,就把新的时刻值再代入到之前的方程,再计算出下一时刻。反复计算,直到计算出 X ( k + N ∣ k ) {X}(k+N|k) X(k+N∣k),预测空间结束。
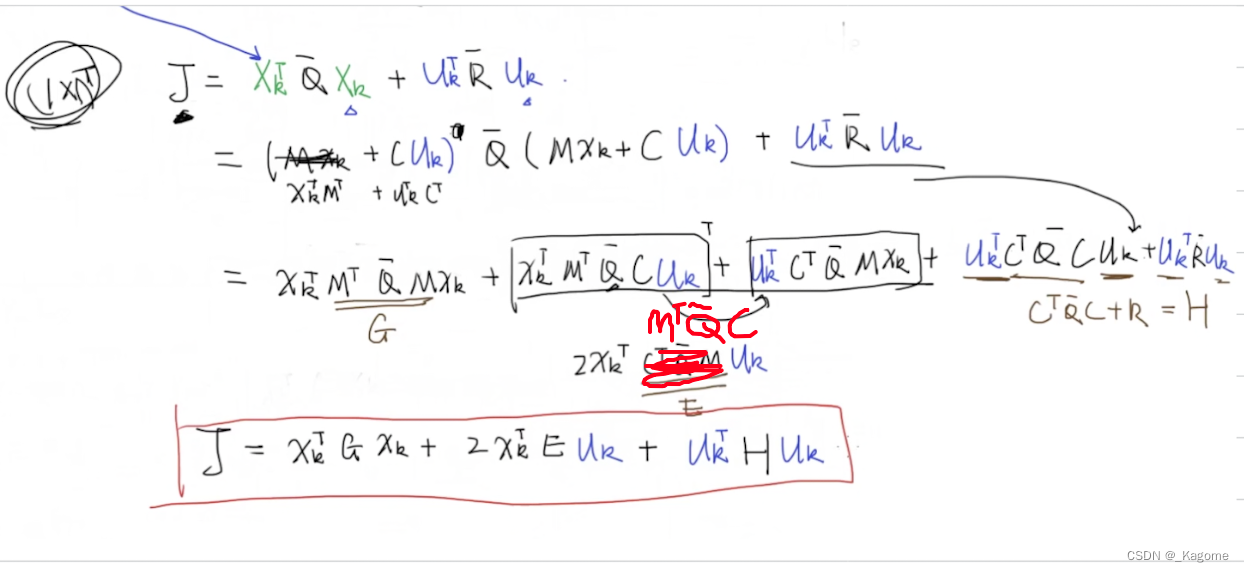
化简结果:
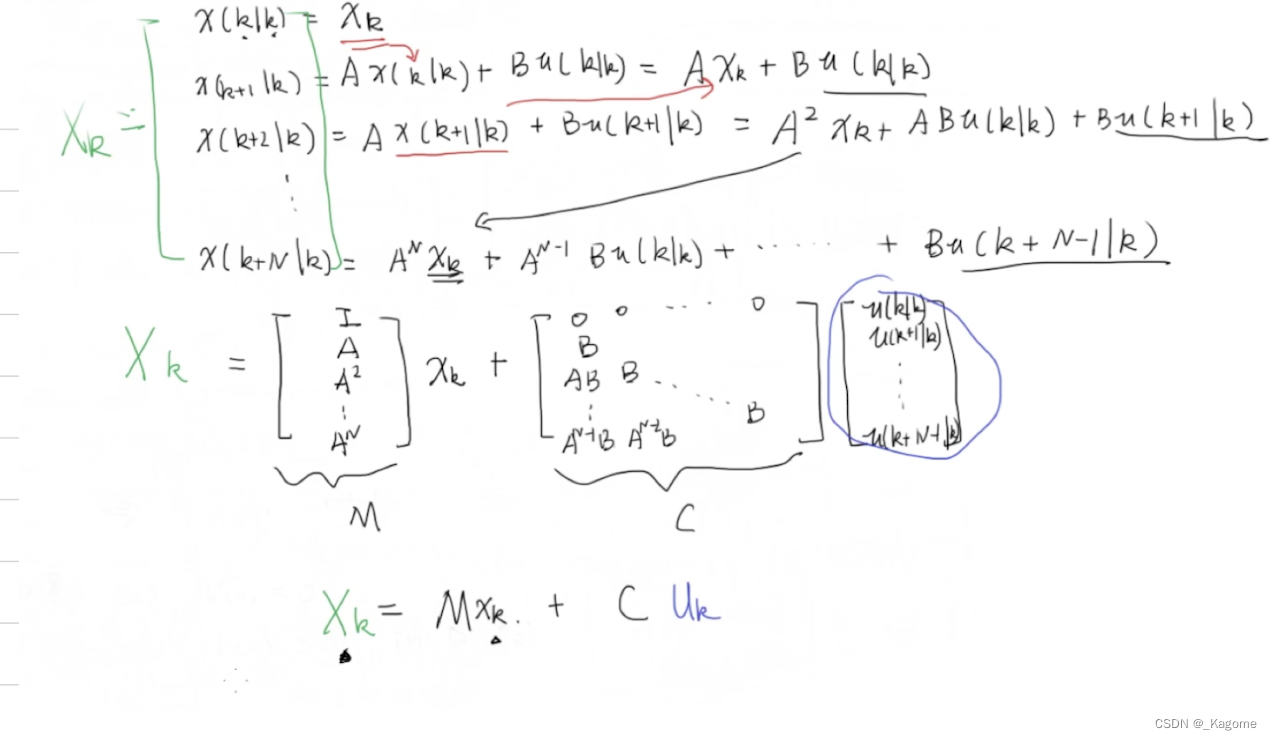
得到了绿色的
X
k
=
M
x
k
+
C
u
k
X_k = Mx_k + Cu_k
Xk=Mxk+Cuk,把这个公式代入到下图当中的
J
J
J中进行化简。
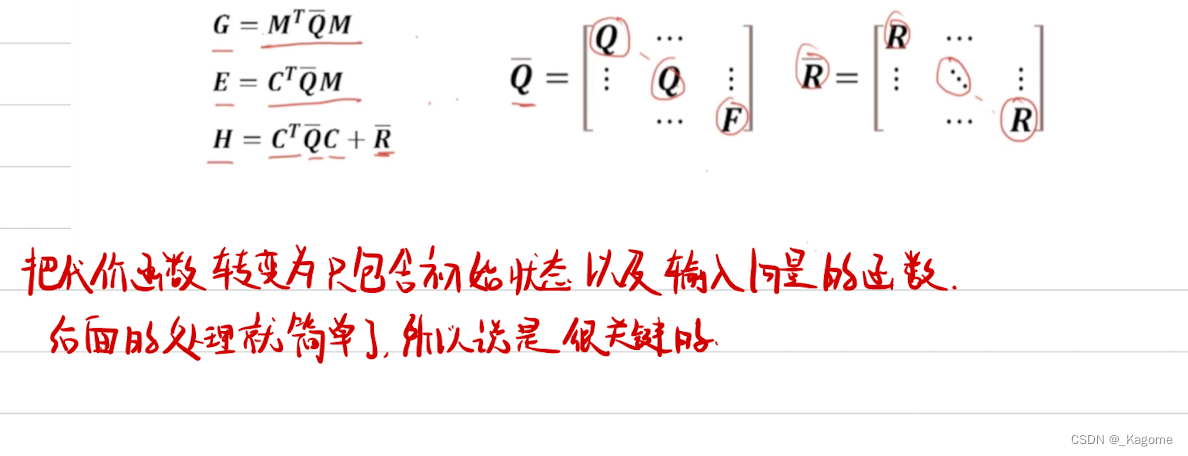
记住,这里的
Q
,
R
Q,R
Q,R都是对角矩阵。
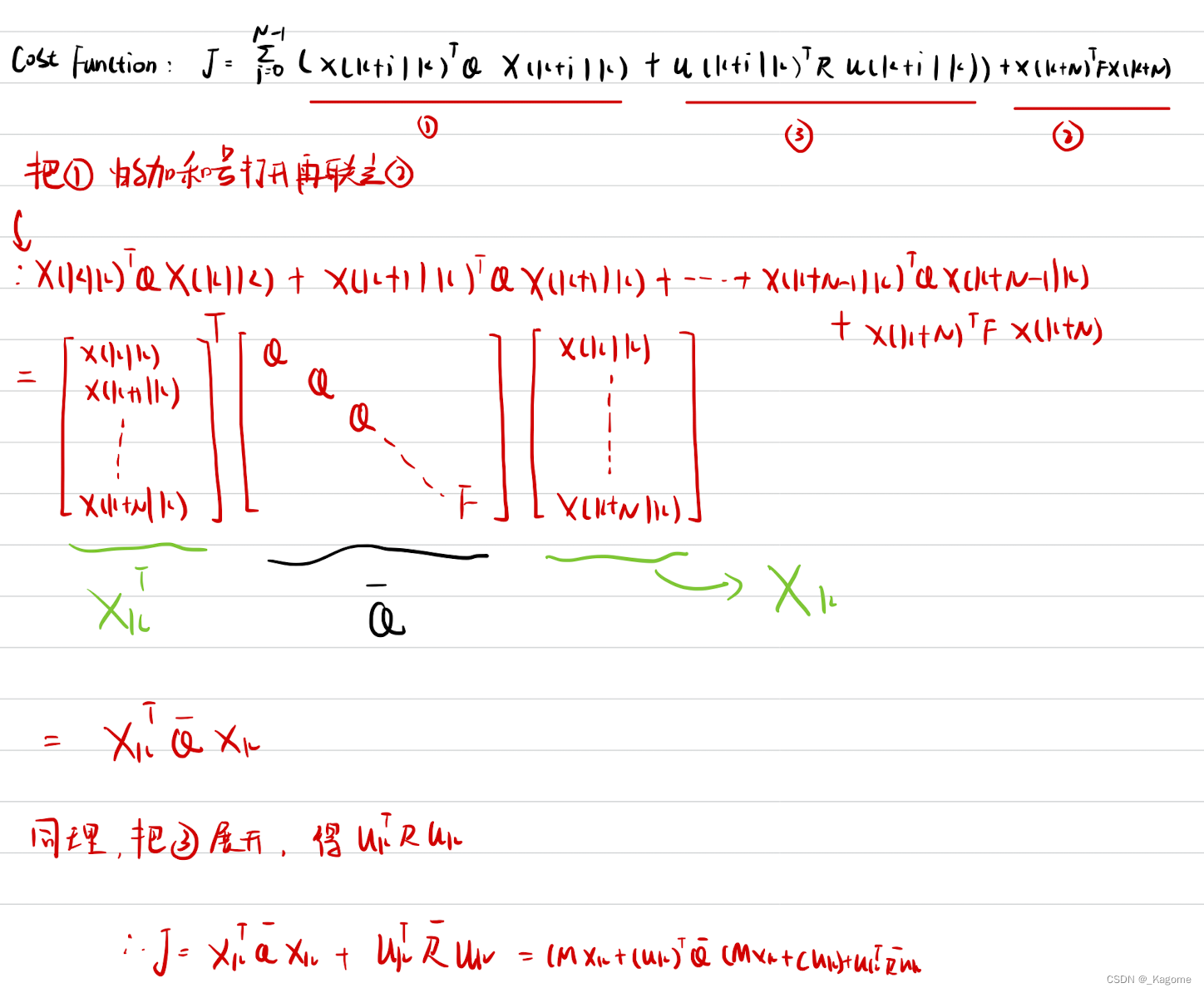
因为
J
J
J是一个数,
1
∗
1
1*1
1∗1的形式,所以中间两项转置也就是本身,可以进行合并。
就是说J是1乘1的矩阵,它的这几个分式子也只能是1乘1的加起来才是1乘1的,所以转置前后相等。
算了这么久,得到了新的代价函数:
J
=
x
k
T
G
x
k
+
2
x
k
T
E
u
k
+
u
k
T
H
u
k
J=x_k^TGx_k+2x_k^TEu_k+u_k^THu_k
J=xkTGxk+2xkTEuk+ukTHuk,最开始的一项只是初始状态,对最优化部分不影响,有了模型后就能进行模型预测控制部分了。
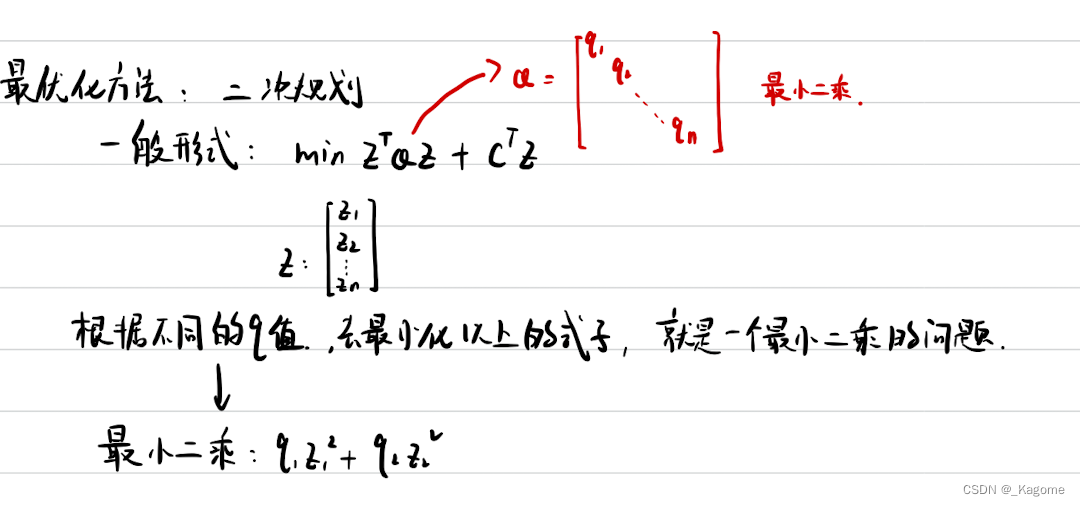
二次规划的一般形式为:
m
i
n
z
T
Q
z
+
c
T
z
min z^TQz+c^Tz
minzTQz+cTz
与二次规划的一般形式进行对比,发现是一模一样的
状态空间的离散表达形式:

一个SISO系统的例子:
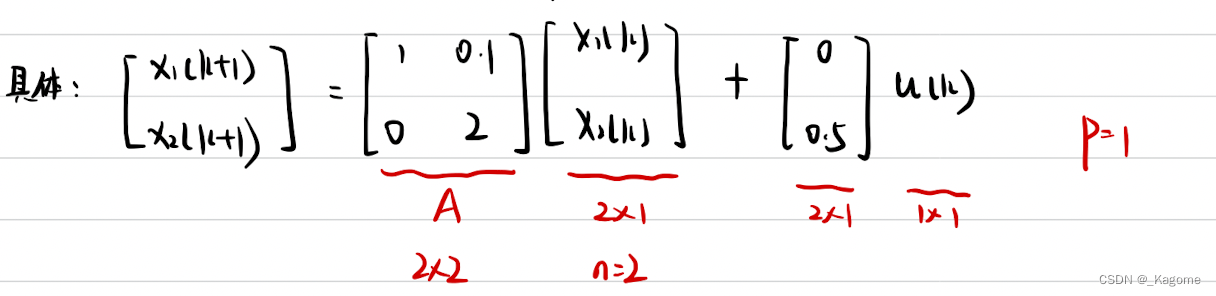
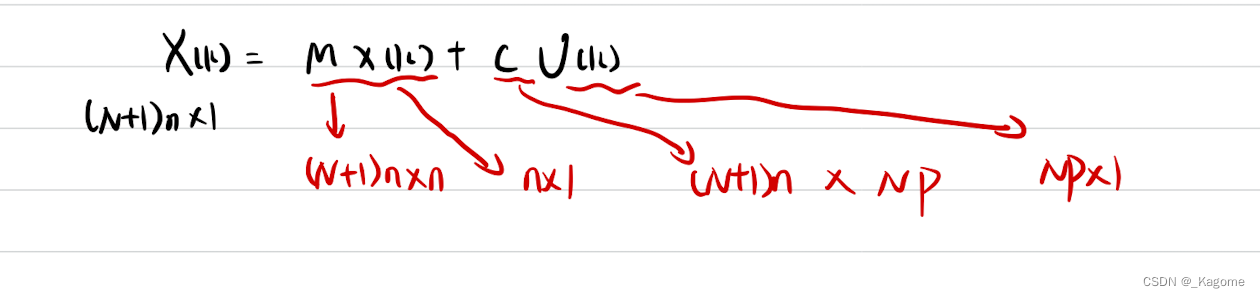
维度的问题需要清楚的了解。
X k X_k Xk维度: ( N + 1 ) n ∗ 1 (N+1)n*1 (N+1)n∗1
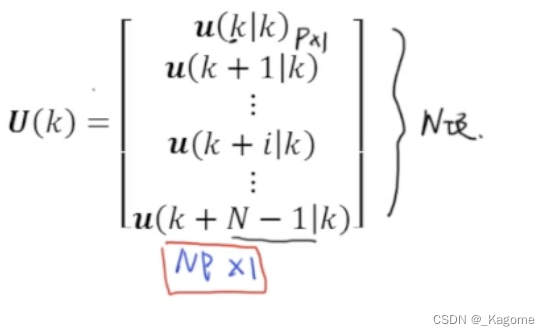
U
k
U_k
Uk维度:
N
p
∗
1
Np*1
Np∗1
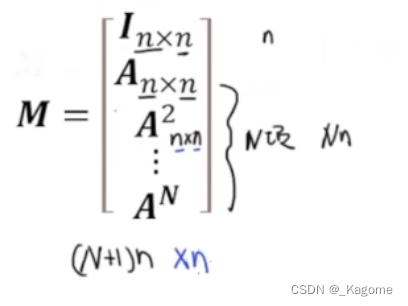
M
M
M的维度:
(
N
+
1
)
n
∗
n
(N+1)n*n
(N+1)n∗n
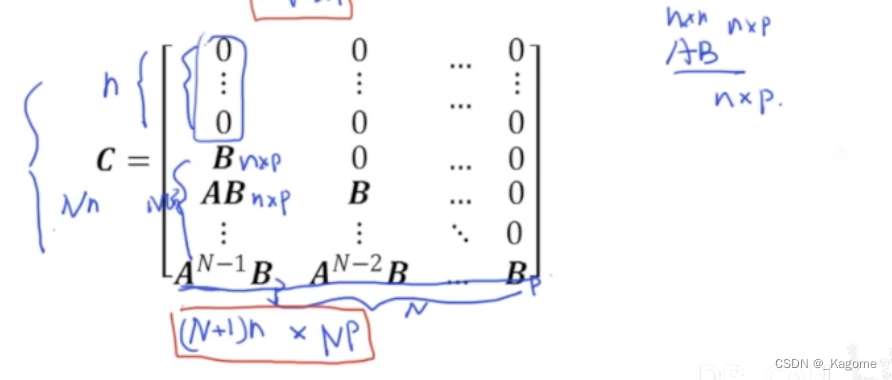
C
C
C的维度:
(
N
+
1
)
n
∗
N
p
(N+1)n*Np
(N+1)n∗Np
之前最优化建模当中推得的表达式为:
X
(
k
)
=
M
x
(
k
)
+
C
U
(
k
)
X(k)=Mx(k)+CU(k)
X(k)=Mx(k)+CU(k)
接下来,就用SISO的例子,具体算一下。


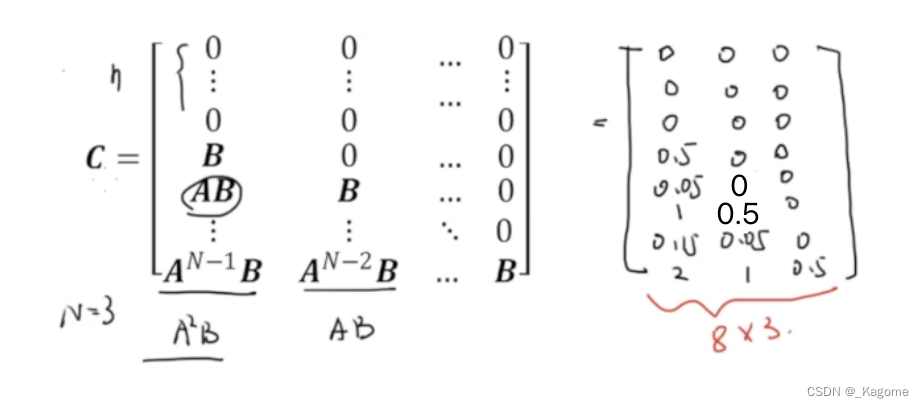
可以化简成以下形式。
现在只包含了输入项以及初始状态项,所以对其进行最优化,就能得到输入的一个最优化结果了。以上是非常关键的一点。
%% 清屏
~~~~~~~~~~~~~~~~~~~~~~~~~~~MPC_Test.m~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
%% 清屏
clear ;
close all;
clc;
%%%%%%%%%%%%%%%%%%%%%%%%%%
%% 第一步,定义状态空间矩阵
%% 定义状态矩阵 A, n x n 矩阵
A = [1 0.1; -1 2];
n= size (A,1);
%% 定义输入矩阵 B, n x p 矩阵
B = [ 0.2 1; 0.5 2];
p = size(B,2);
%% 定义Q矩阵,n x n 矩阵
Q=[100 0;0 1];
%% 定义F矩阵,n x n 矩阵
F=[100 0;0 1];
%% 定义R矩阵,p x p 矩阵
R=[1 0 ;0 .1];
%% 定义step数量k
k_steps=100;
%% 定义矩阵 X_K, n x k 矩 阵
X_K = zeros(n,k_steps);
%% 初始状态变量值, n x 1 向量
X_K(:,1) =[20;-20];
%% 定义输入矩阵 U_K, p x k 矩阵
U_K=zeros(p,k_steps);
%% 定义预测区间K
N=5;
%% Call MPC_Matrices 函数 求得 E,H矩阵
[E,H]=MPC_Matrices(A,B,Q,R,F,N);
%% 计算每一步的状态变量的值
for k = 1 : k_steps
%% 求得U_K(:,k)
U_K(:,k) = Prediction(X_K(:,k),E,H,N,p);
%% 计算第k+1步时状态变量的值
X_K(:,k+1)=(A*X_K(:,k)+B*U_K(:,k));
end
%% 绘制状态变量和输入的变化
subplot (2, 1, 1);
hold;
for i =1 :size (X_K,1)
plot (X_K(i,:));
end
legend("x1","x2")
hold off;
subplot (2, 1, 2);
hold;
for i =1 : size (U_K,1)
plot (U_K(i,:));
end
legend("u1","u2")
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~MPC_Matrices.m~~~~~~~~~~~~~~~~~~~~
function [E , H]=MPC_Matrices(A,B,Q,R,F,N)
n=size(A,1); % A 是 n x n 矩阵, 得到 n
p=size(B,2); % B 是 n x p 矩阵, 得到 p
%%%%%%%%%%%%
M=[eye(n);zeros(N*n,n)]; % 初始化 M 矩阵. M 矩阵是 (N+1)n x n的,
% 它上面是 n x n 个 "I", 这一步先把下半部
% 分写成 0
C=zeros((N+1)*n,N*p); % 初始化 C 矩阵, 这一步令它有 (N+1)n x NP 个 0
% 定义M 和 C
tmp=eye(n); %定义一个n x n 的 I 矩阵
% 更新M和C
for i=1:N % 循环,i 从 1到 N
rows =i*n+(1:n); %定义当前行数,从i x n开始,共n行
C(rows,:)=[tmp*B,C(rows-n, 1:end-p)]; %将c矩阵填满
tmp= A*tmp; %每一次将tmp左乘一次A
M(rows,:)=tmp; %将M矩阵写满
end
% 定义Q_bar和R_bar
Q_bar = kron(eye(N),Q);
Q_bar = blkdiag(Q_bar,F);
R_bar = kron(eye(N),R);
% 计算G, E, H
G=M'*Q_bar*M; % G: n x n
E=C'*Q_bar*M; % E: NP x n
H=C'*Q_bar*C+R_bar; % NP x NP
end
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~Prediction.m~~~~~~~~~~~~~~~~~~~~~
function u_k= Prediction(x_k,E,H,N,p)
U_k = zeros(N*p,1); % NP x 1
U_k = quadprog(H,E*x_k);
u_k = U_k(1:p,1); % 取第一个结果
end
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
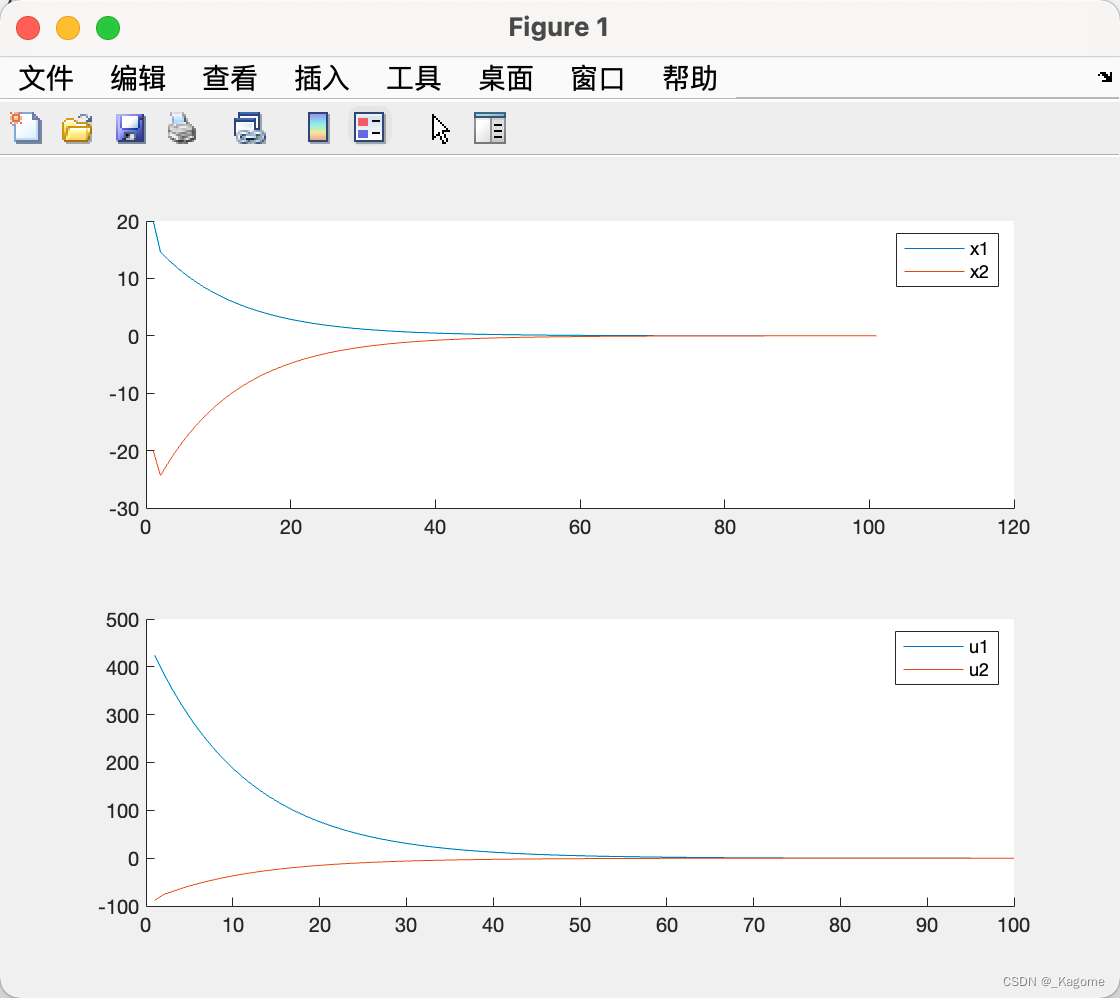
可以看出随着K的增加,是逐渐趋向于0的。要侧重于
x
1
,
x
2
,
u
1
,
u
2
x_1,x_2,u_1,u_2
x1,x2,u1,u2可以修改代码当中对应的权重系数。
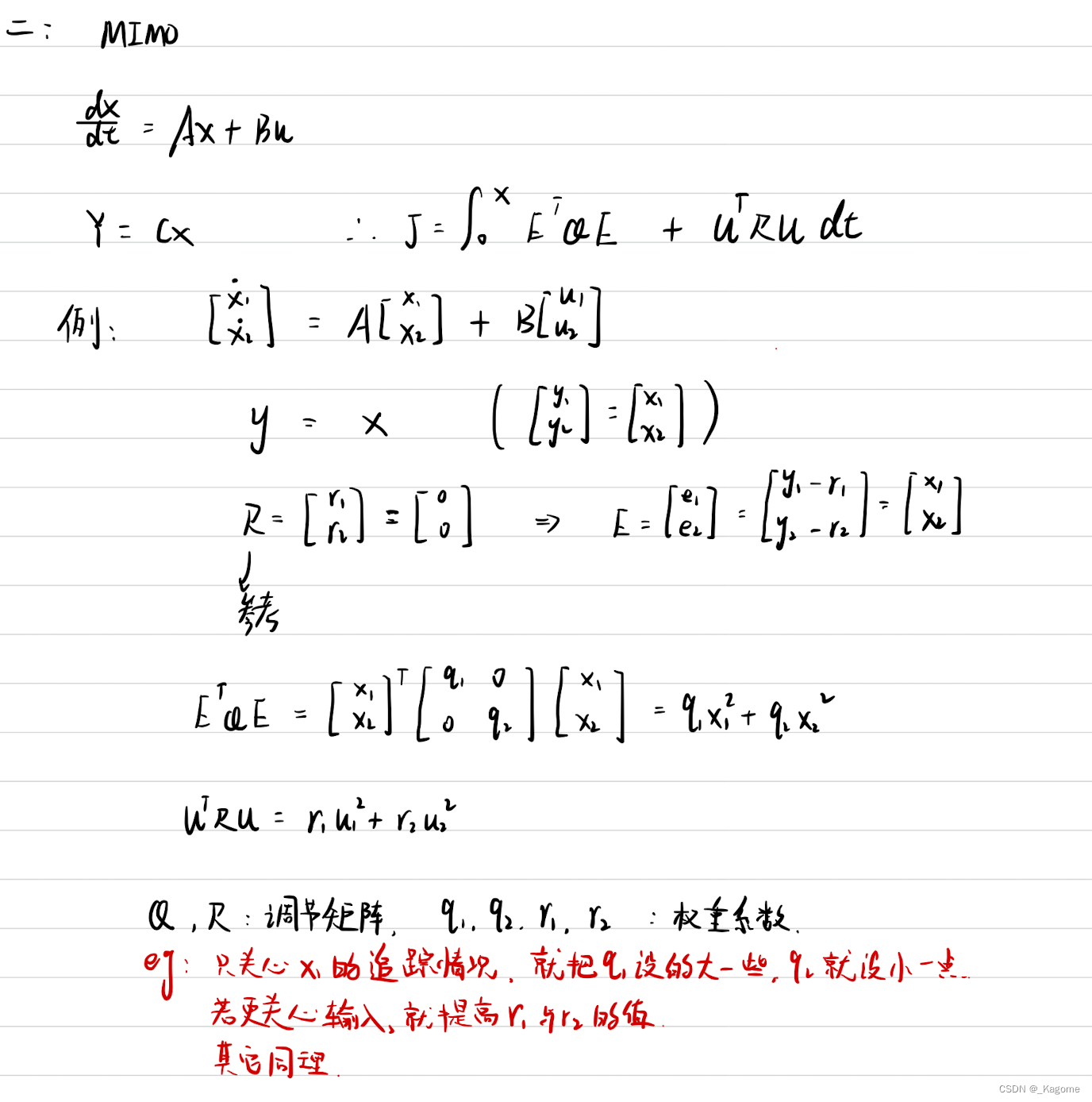
以上不光适用于SISO,也适用于MIMO。
我有一个模型:classItem项目有一个属性“商店”基于存储的值,我希望Item对象对特定方法具有不同的行为。Rails中是否有针对此的通用设计模式?如果方法中没有大的if-else语句,这是如何干净利落地完成的? 最佳答案 通常通过Single-TableInheritance. 关于ruby-on-rails-Rails-子类化模型的设计模式是什么?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.co
我正在使用的第三方API的文档状态:"[O]urAPIonlyacceptspaddedBase64encodedstrings."什么是“填充的Base64编码字符串”以及如何在Ruby中生成它们。下面的代码是我第一次尝试创建转换为Base64的JSON格式数据。xa=Base64.encode64(a.to_json) 最佳答案 他们说的padding其实就是Base64本身的一部分。它是末尾的“=”和“==”。Base64将3个字节的数据包编码为4个编码字符。所以如果你的输入数据有长度n和n%3=1=>"=="末尾用于填充n%
我需要从一个View访问多个模型。以前,我的links_controller仅用于提供以不同方式排序的链接资源。现在我想包括一个部分(我假设)显示按分数排序的顶级用户(@users=User.all.sort_by(&:score))我知道我可以将此代码插入每个链接操作并从View访问它,但这似乎不是“ruby方式”,我将需要在不久的将来访问更多模型。这可能会变得很脏,是否有针对这种情况的任何技术?注意事项:我认为我的应用程序正朝着单一格式和动态页面内容的方向发展,本质上是一个典型的网络应用程序。我知道before_filter但考虑到我希望应用程序进入的方向,这似乎很麻烦。最终从任何
我有一个包含模块的模型。我想在模块中覆盖模型的访问器方法。例如:classBlah这显然行不通。有什么想法可以实现吗? 最佳答案 您的代码看起来是正确的。我们正在毫无困难地使用这个确切的模式。如果我没记错的话,Rails使用#method_missing作为属性setter,因此您的模块将优先,阻止ActiveRecord的setter。如果您正在使用ActiveSupport::Concern(参见thisblogpost),那么您的实例方法需要进入一个特殊的模块:classBlah
我有一个表单,其中有很多字段取自数组(而不是模型或对象)。我如何验证这些字段的存在?solve_problem_pathdo|f|%>... 最佳答案 创建一个简单的类来包装请求参数并使用ActiveModel::Validations。#definedsomewhere,atthesimplest:require'ostruct'classSolvetrue#youcouldevencheckthesolutionwithavalidatorvalidatedoerrors.add(:base,"WRONG!!!")unlesss
我想向我的Controller传递一个参数,它是一个简单的复选框,但我不知道如何在模型的form_for中引入它,这是我的观点:{:id=>'go_finance'}do|f|%>Transferirde:para:Entrada:"input",:placeholder=>"Quantofoiganho?"%>Saída:"output",:placeholder=>"Quantofoigasto?"%>Nota:我想做一个额外的复选框,但我该怎么做,模型中没有一个对象,而是一个要检查的对象,以便在Controller中创建一个ifelse,如果没有检查,请帮助我,非常感谢,谢谢
当我在Rails控制台中按向上或向左箭头时,出现此错误:irb(main):001:0>/Users/me/.rvm/gems/ruby-2.0.0-p247/gems/rb-readline-0.4.2/lib/rbreadline.rb:4269:in`blockin_rl_dispatch_subseq':invalidbytesequenceinUTF-8(ArgumentError)我使用rvm来管理我的ruby安装。我正在使用=>ruby-2.0.0-p247[x86_64]我使用bundle来管理我的gem,并且我有rb-readline(0.4.2)(人们推荐的最少
我正在使用Ruby2.1.1和Rails4.1.0.rc1。当执行railsc时,它被锁定了。使用Ctrl-C停止,我得到以下错误日志:~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.2/lib/spring/client/run.rb:47:in`gets':Interruptfrom~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.2/lib/spring/client/run.rb:47:in`verify_server_version'from~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.
我有一些非常大的模型,我必须将它们迁移到最新版本的Rails。这些模型有相当多的验证(User有大约50个验证)。是否可以将所有这些验证移动到另一个文件中?说app/models/validations/user_validations.rb。如果可以,有人可以提供示例吗? 最佳答案 您可以为此使用关注点:#app/models/validations/user_validations.rbrequire'active_support/concern'moduleUserValidationsextendActiveSupport:
我将我的Rails应用程序部署到OpenShift,它运行良好,但我无法在生产服务器上运行“Rails控制台”。它给了我这个错误。我该如何解决这个问题?我尝试更新rubygems,但它也给出了权限被拒绝的错误,我也无法做到。railsc错误:Warning:You'reusingRubygems1.8.24withSpring.UpgradetoatleastRubygems2.1.0andrun`gempristine--all`forbetterstartupperformance./opt/rh/ruby193/root/usr/share/rubygems/rubygems