文章目录
目前常用的pnp方法有很多,但是本人学习和查阅后发现比较零散,因此,在这里将所学习的方法按照理解分类和总结,并且着重提出实现过程中或者原理上需要注意的点。PnP是Perspective-n-Point的缩写,指在已知相机内参数的前提下,利用某角度下n个三维点与它们对应的图像点坐标,估算出此时拍摄位置的信息。
PnP是一类3D-2D对应关系的问题,相似的还有2D-2D,3D-3D关系。
2D-2D关系比如两个视角下拍摄平面物体,根据两幅图像平面上的若干个对应的特征点估算出单应性变换关系;比如对极几何中,左、右相机视图中的点满足极线约束的关系,左图上的一点,利用基础矩阵能够计算出右图的匹配点所在的直线。
3D-3D关系是以三维空间中的坐标系变换为主,在点云拼接中会遇到,比如ICP等。
本文的3D-2D关系,根据背景中提及的,主要用于确定某的图像拍摄的角度,在定位中会经常遇到。
根据PnP原理的不同,按照我个人的理解,将这些方法分为两个大类:
Ⅰ类:通过3D-2D的投影矩阵,直接求解投影方程中的未知数,也就是位姿参数的矩阵
Ⅱ类:通过解算出3D点在相机坐标系下的坐标,结合3D点在世界坐标系的坐标,解算出坐标系转换关系,也就是位姿参数的矩阵
P3P指利用3对3D-2D点来估计相机位姿,解决思路属于第Ⅱ类方法。整体思路为:已知物体点ABC在世界坐标系的坐标,通过他们在图像上的投影点abc,以及光心O构成的三角锥的几何关系,来得到ABC在相机坐标系下的坐标,由此计算出位姿转换矩阵。具体是:


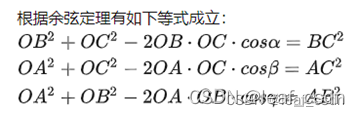 方程组中,未知数为OA,OB,OC。这是已知AB、BC、AC长度和三个夹角,计算OA、OB、OC的长度的问题,进一步的吴消元法得到一元四次方程,最终得到4组解析解(详细过程可参见其他博客)。因此,需要第4个点对来验证合适解。解算出这三个量的长度后,又知道oa,ob,oc向量的方向,那么就能得到A,B,C在相机坐标下的坐标.
方程组中,未知数为OA,OB,OC。这是已知AB、BC、AC长度和三个夹角,计算OA、OB、OC的长度的问题,进一步的吴消元法得到一元四次方程,最终得到4组解析解(详细过程可参见其他博客)。因此,需要第4个点对来验证合适解。解算出这三个量的长度后,又知道oa,ob,oc向量的方向,那么就能得到A,B,C在相机坐标下的坐标.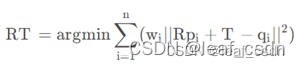
小结:P3P应用时需注意:3个点不共线,实际是要N≥4。
DLT(direct linear transform)属于第Ⅰ类方法。整体思路为:

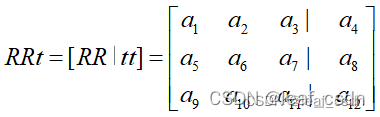



小结:DLT应用时需注意:所有点不能共面,N≥6,要做数据归一化;SVD的结果还需要进一步分解才能估算得到最终的位姿矩阵
前面说PnP是3D-2D的问题,若3D点共面,将变为2D-2D问题,可以通过平面的单应性性质来估算位姿参数,重点是单应性矩阵如何分解为R,T。具体可参见另一篇博客Opencv外参估计cvFindExtrinsicCameraParams2原理解析(三),该方法属于第Ⅰ类方法。

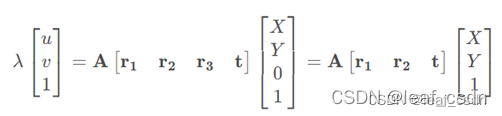 投影方程的输入和输出都是二维点,那么求解的单应性矩阵满足
投影方程的输入和输出都是二维点,那么求解的单应性矩阵满足


小结:应用时需注意:所有点需要共面,N≥4,重点是如何由单应性分解出旋转和平移量
迭代法实现的思路与opencv标定时,对外参数进行初始值估计时使用的迭代法相同,重点在于求解6个外参数的偏导数,具体可参见我的博客外参数求偏导。该方法属于第Ⅰ类方法。
根据投影矩阵,建立投影点与真实点的残差,以最小化投影残差为目标,优化计算RT
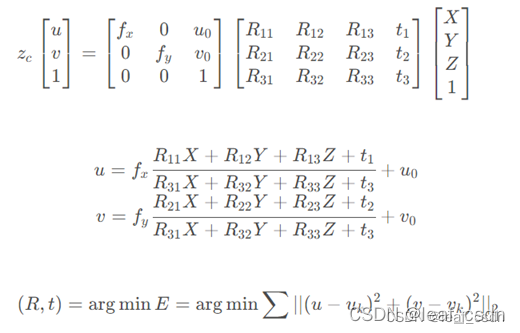
小结:应用时需注意:需要较好的初始值,通常会在之前方法的基础上应用迭代法,所以N取决于初始值的方法
E是efficient的缩写,高效性主要体现在第4步所阐述。该方法属于第Ⅱ类方法。整体思路为:
由世界坐标系的3D点得到四个控制点Cj(一个质心,三个主方向上的点),控制点建立质心坐标系,其他的点都能用该四个点加权表示。一个重要的结论是:无论在世界坐标系,还是相机坐标系,权重系数是不变的。那么只要能够求解出在相机坐标下这4个控制点的坐标,带入相同的权重系数,就能计算任意点在相机坐标系的位置,从而转换为3D-3D坐标系变换问题。

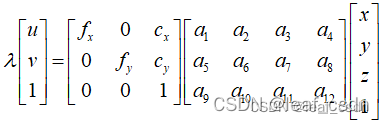
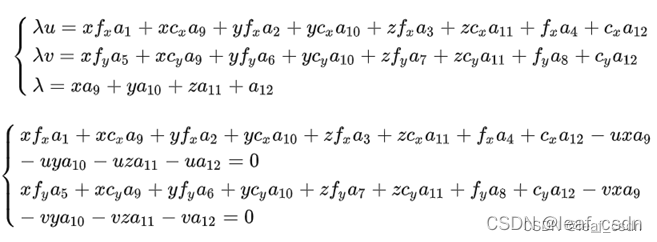
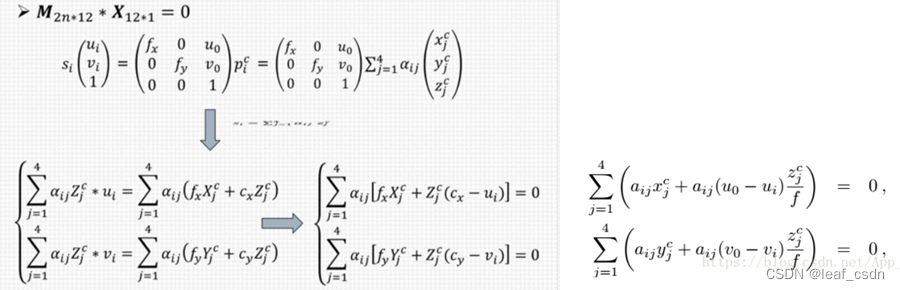
为了求解这4个点的相机坐标系的位置,如下左图根据投影矩阵展开得到两个等式:已知数是内参数和权重系数,未知数是四个控制点的三维坐标(共12个未知数),因此至少要6对点来进行求解。
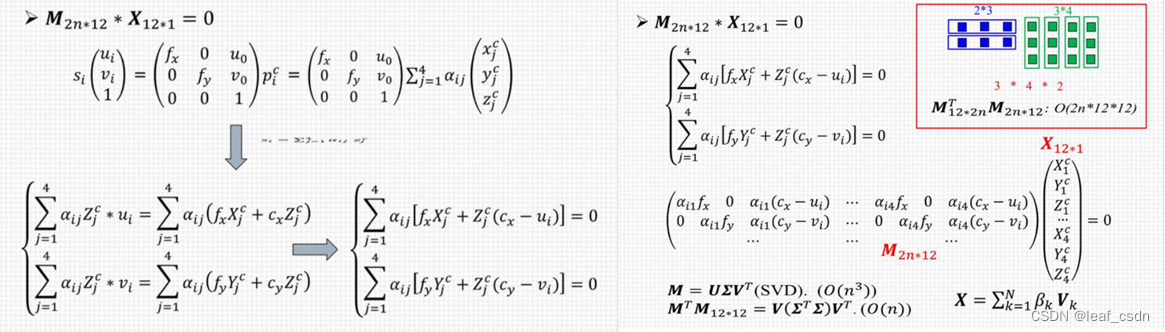
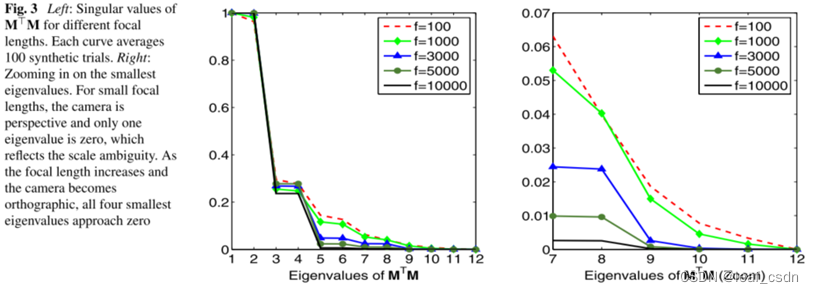
对于上面形如AX=0的解,SVD分解A系数矩阵,V的最后一列是特征值最小的零空间向量,也就是方程的解。我们知道对于12个未知数的方程组,至少要6对点来能求解,原文之所以N在4到6也可以计算,个人认为是包含了一个隐含条件,那就是焦距足够大,下图是原文在随着焦距增大时,SVD最小的4个特征值是接近0的,因此能够用V最后1~4列的向量来加权表示AX=0的解。
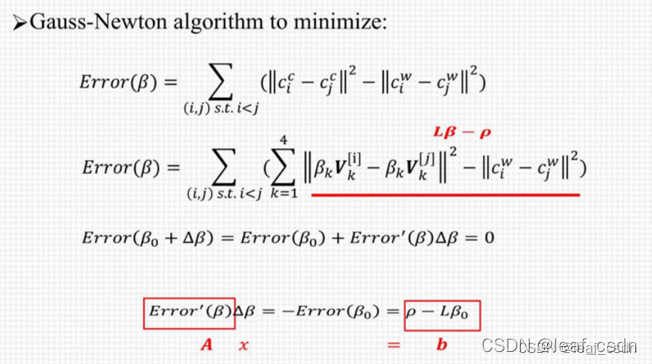
进一步用高斯牛顿迭代,对上述中“用V最后1~4列的向量来加权表示AX=0的解”中的权重计算最优解,细化求解相机坐标系下的控制点坐标。这里,EPNP的高效主要是算法复杂度为O(n),并且高斯牛顿迭代过程相对于传统的迭代法来说参数更少,至多4个权重系数,而迭代法为6个外参数,收敛更快。这也就是我对高效性的理解。
由Pi在相机坐标系和世界坐标系的坐标,计算转换矩阵。
小结:应用时需注意: N≥4,但实际应用N≥6才算稳定
**延申1:**在未知相机内参数的情况下,诸多方法也能适用,但解算的稳定性不同,如UPnP(Uncalibrated PnP),求解过程与EPnP相似,只是在求解控制点在相机坐标系的坐标时,建立方程组将焦距也作为未知数
**延申2:**通常内参和外参都未知时,根据3D-2D点得到了内参外参组合的摄像机矩阵,需要进一步分解内参矩阵和外参矩阵,这里需要利用内参矩阵的上三角特点,利用RQ分解来得到内参K,外参R和t摄像机矩阵的分解
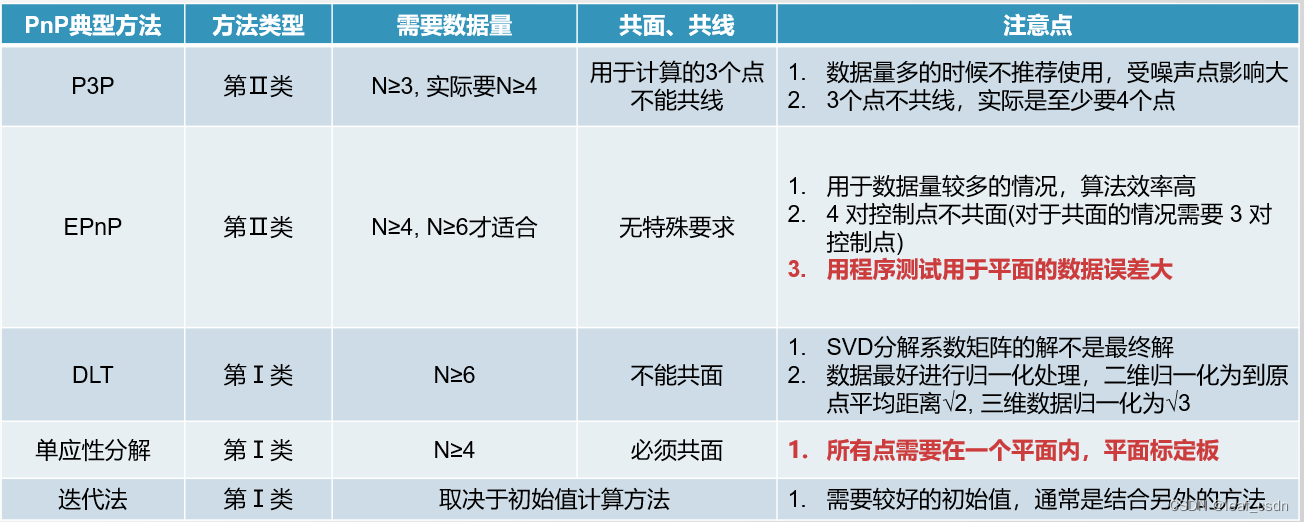
最后是对上面所有提及方法的一个总结,通常使用平面标定板在进行相机标定时,会使用到单应性分解+迭代法的组合,我这里测试EPNP时发现在平面数据上结果偏差还是比较大的,后续有分析结果再更新。
我想为Heroku构建一个Rails3应用程序。他们使用Postgres作为他们的数据库,所以我通过MacPorts安装了postgres9.0。现在我需要一个postgresgem并且共识是出于性能原因你想要pggem。但是我对我得到的错误感到非常困惑当我尝试在rvm下通过geminstall安装pg时。我已经非常明确地指定了所有postgres目录的位置可以找到但仍然无法完成安装:$envARCHFLAGS='-archx86_64'geminstallpg--\--with-pg-config=/opt/local/var/db/postgresql90/defaultdb/po
尝试通过RVM将RubyGems升级到版本1.8.10并出现此错误:$rvmrubygemslatestRemovingoldRubygemsfiles...Installingrubygems-1.8.10forruby-1.9.2-p180...ERROR:Errorrunning'GEM_PATH="/Users/foo/.rvm/gems/ruby-1.9.2-p180:/Users/foo/.rvm/gems/ruby-1.9.2-p180@global:/Users/foo/.rvm/gems/ruby-1.9.2-p180:/Users/foo/.rvm/gems/rub
我的最终目标是安装当前版本的RubyonRails。我在OSXMountainLion上运行。到目前为止,这是我的过程:已安装的RVM$\curl-Lhttps://get.rvm.io|bash-sstable检查已知(我假设已批准)安装$rvmlistknown我看到当前的稳定版本可用[ruby-]2.0.0[-p247]输入命令安装$rvminstall2.0.0-p247注意:我也试过这些安装命令$rvminstallruby-2.0.0-p247$rvminstallruby=2.0.0-p247我很快就无处可去了。结果:$rvminstall2.0.0-p247Search
由于fast-stemmer的问题,我很难安装我想要的任何rubygem。我把我得到的错误放在下面。Buildingnativeextensions.Thiscouldtakeawhile...ERROR:Errorinstallingfast-stemmer:ERROR:Failedtobuildgemnativeextension./System/Library/Frameworks/Ruby.framework/Versions/2.0/usr/bin/rubyextconf.rbcreatingMakefilemake"DESTDIR="cleanmake"DESTDIR=
当我尝试安装Ruby时遇到此错误。我试过查看this和this但无济于事➜~brewinstallrubyWarning:YouareusingOSX10.12.Wedonotprovidesupportforthispre-releaseversion.Youmayencounterbuildfailuresorotherbreakages.Pleasecreatepull-requestsinsteadoffilingissues.==>Installingdependenciesforruby:readline,libyaml,makedepend==>Installingrub
我正在尝试使用boilerpipe来自JRuby。我看过guide从JRuby调用Java,并成功地将它与另一个Java包一起使用,但无法弄清楚为什么同样的东西不能用于boilerpipe。我正在尝试基本上从JRuby中执行与此Java等效的操作:URLurl=newURL("http://www.example.com/some-location/index.html");Stringtext=ArticleExtractor.INSTANCE.getText(url);在JRuby中试过这个:require'java'url=java.net.URL.new("http://www
我意识到这可能是一个非常基本的问题,但我现在已经花了几天时间回过头来解决这个问题,但出于某种原因,Google就是没有帮助我。(我认为部分问题在于我是一个初学者,我不知道该问什么......)我也看过O'Reilly的RubyCookbook和RailsAPI,但我仍然停留在这个问题上.我找到了一些关于多态关系的信息,但它似乎不是我需要的(尽管如果我错了请告诉我)。我正在尝试调整MichaelHartl'stutorial创建一个包含用户、文章和评论的博客应用程序(不使用脚手架)。我希望评论既属于用户又属于文章。我的主要问题是:我不知道如何将当前文章的ID放入评论Controller。
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
首先回顾一下拉格朗日定理的内容:函数f(x)是在闭区间[a,b]上连续、开区间(a,b)上可导的函数,那么至少存在一个,使得:通过这个表达式我们可以知道,f(x)是函数的主体,a和b可以看作是主体函数f(x)中所取的两个值。那么可以有, 也就意味着我们可以用来替换 这种替换可以用在求某些多项式差的极限中。方法: 外层函数f(x)是一致的,并且h(x)和g(x)是等价无穷小。此时,利用拉格朗日定理,将原式替换为 ,再进行求解,往往会省去复合函数求极限的很多麻烦。使用要注意:1.要先找到主体函数f(x),即外层函数必须相同。2.f(x)找到后,复合部分是等价无穷小。3.要满足作差的形式。如果是加
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit