文章目录
本文操作环境:Ubuntu14.04、GEC6818
这里为似懂非懂的朋友简单叙述该文章的具体操作由来,我们的主要目的是将写好的驱动程序烧进开发板中,看到我们想要的现象。
第一个,我们需要让开发板和Linux平台建立联系,这样我们才能让俩者进行更好的交互,这个中间件网上有许多,这里我以putty为例连接展示。
第二个,在Linux上交叉编译好的可执行文件需要上传到中间件上运行,这里需要使用nfs服务挂载到开发板上。
第三个,在该ARM板上,厂商已为客户写入部分内核驱动模块。
sudo apt-get install nfs-kernel-server
sudo mkdir -p /home/incipe/nfs
sudo chmod 777 /home/incipe/nfs
vim /etc/exports //(在exports下面添加如在语句)
/home/incipe/nfs (rw)
sudo /etc/init.d/nfs-kernel-server restart
看到有四个OK出现即为设置成功。
所需为一块ARM板、一根串口线、一根网线、一根电源线。
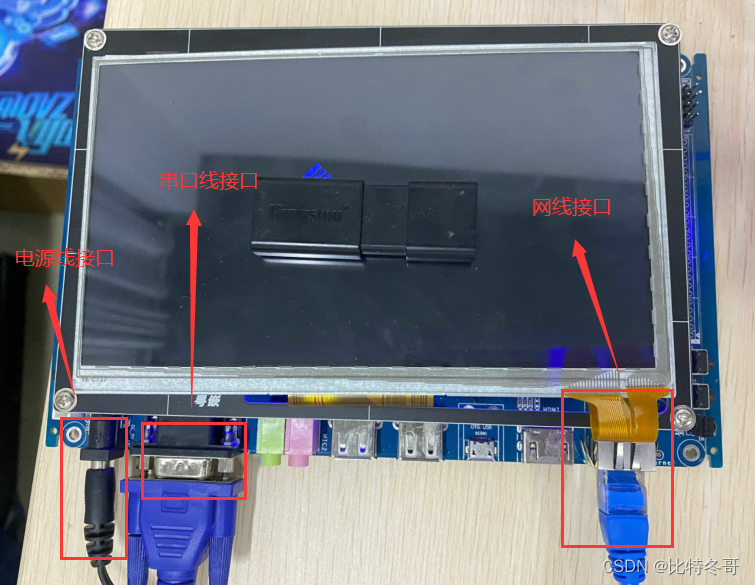
使用母头串口线、网线、电源线将QT6818开发板与我们电脑相连,查看端口,然后打开我们的Putty,将端口号填写好,然后比特流改成115200,然后开启开发板和Putty。
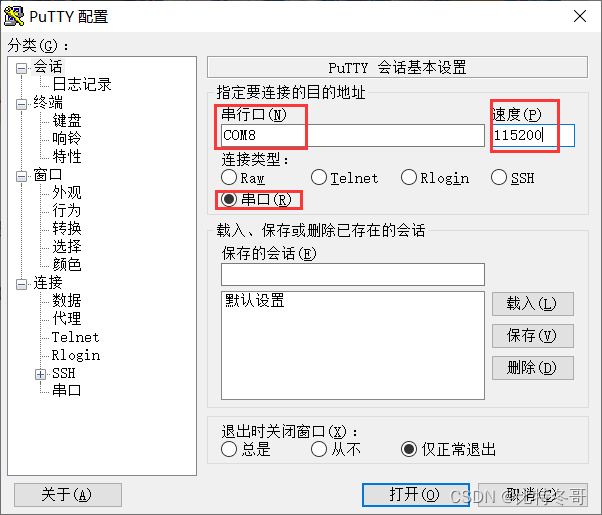
至此,putty连接ARM板成功!
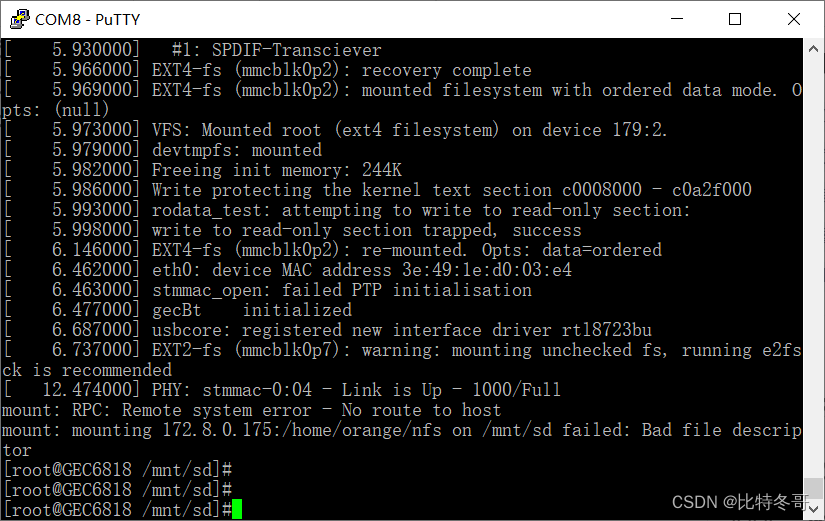
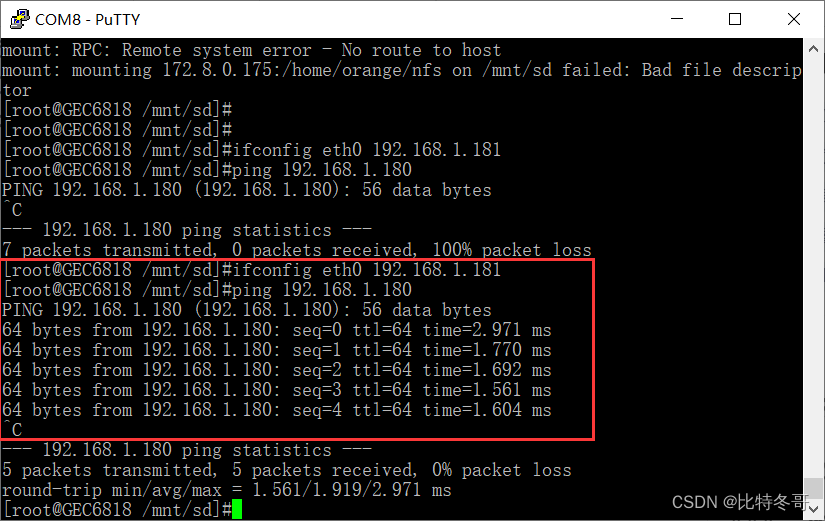
查看开发板、Ubuntu的IP地址,修改开发板、Ubuntude IP地址。先在Ubuntu和开发板上查看其IP地址,输入命令:ifconfig,然后我们要将Ubuntu的IP地址改成和开发板一个网段的地址。改装完之后在Ubuntu上再输入ifconfig命令,查看是否改装成功。
查看IP地址命令:ifconfig
更改IP地址命令:ifconfig eth0 xxx.xxx.x.xxx
更改为同一网段后相互ping通:ping xxx.xxx.x.xxx
将编译好的驱动程序复制到之前创建的共享文件夹 /home/incipe/nfs
(以下是在Linux终端执行)
cp /mnt/hgfs/Ubuntu14.04_share/led_test.c /home/incipe/nfs/
在/home/incipe/nfs 文件中交叉编译led_test.c文件
(此前需要安装交叉编译环境)
arm-linux-gcc -o led_test led_test.c
将交叉编译生成的led_test可执行文件挂载到开发板,在putty上执行如下语句实现挂载:
mount -t nfs 192.168.1.180:/home/incipe/nfs /mnt/sd -o nolock
其中
192.168.1.180:/home/incipe/nfs 为Linux IP地址及Linux下的共享文件夹
/mnt/sd 为挂载在开发板上地址
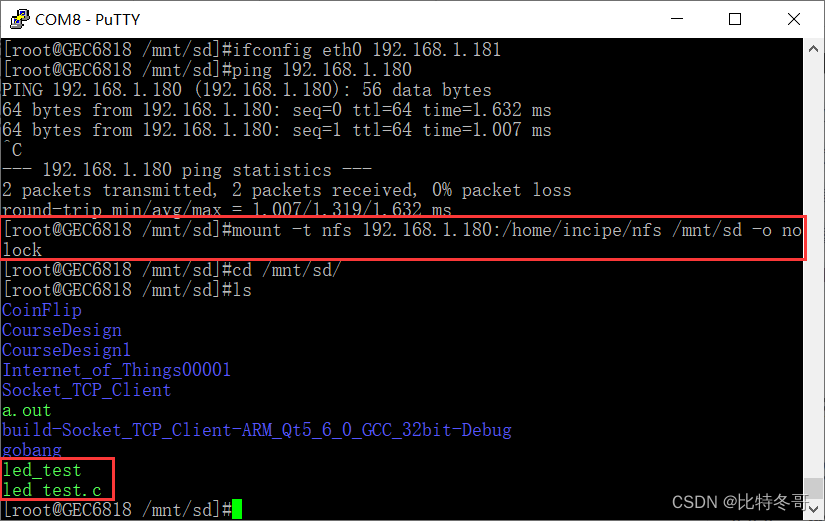
可见,挂载成功。
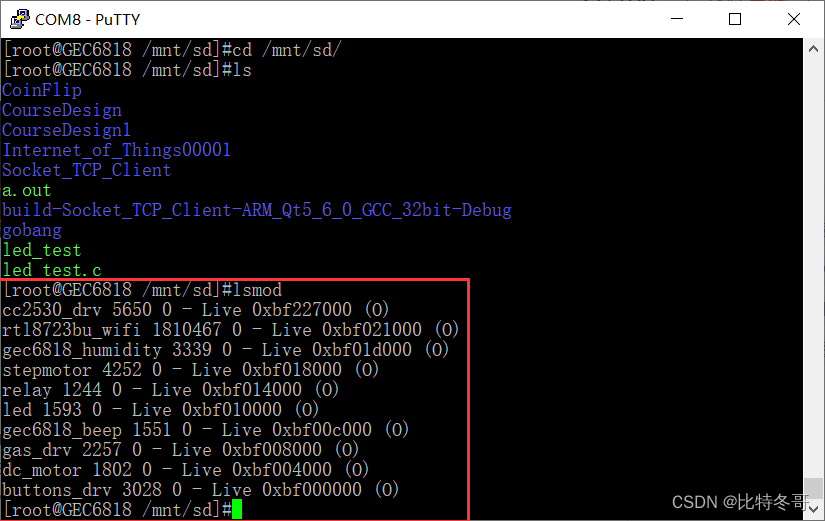
此前,你需知道的常见驱动命令:
接下来,我以上方已加载的led驱动模块为例,烧入驱动程序
先观察烧入前板子上的 led 状态(默认状态全亮)

运行已挂载的可执行文件: ./led_test
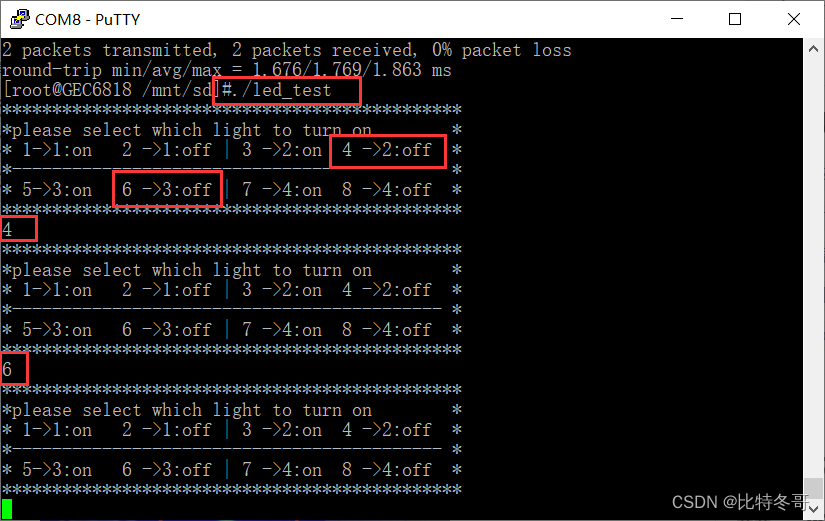
输入数字“4”和“6”表示关闭第2个和第3个led灯,观察现象:

观察可知,第二个和第三个led灯成功关闭。
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#define TEST_MAGIC 'x' //定义幻数
#define TEST_MAX_NR 2 //定义命令的最大序数
//定义LED的魔幻数
#define LED1 _IO(TEST_MAGIC, 0)
#define LED2 _IO(TEST_MAGIC, 1)
#define LED3 _IO(TEST_MAGIC, 2)
#define LED4 _IO(TEST_MAGIC, 3)
/*************************************************
*主函数-实现led的控制
*************************************************/
int main(int argc, char **argv)
{
int fd,val;
fd = open("/dev/Led",O_RDWR); //打开设备下的LED,成功返回0
if(fd<0)
{
perror("Can not open /dev/LED\n");
return 0;
}
while(1)
{
val = 0;
printf("**********************************************\n");
printf("*please select which light to turn on *\n");
printf("* 1->1:on 2 ->1:off | 3 ->2:on 4 ->2:off *\n");
printf("*------------------------------------------- *\n");
printf("* 5->3:on 6 ->3:off | 7 ->4:on 8 ->4:off *\n");
printf("**********************************************\n");
scanf("%d",&val);
while(val == 0)
{
printf("****************\n");
scanf("%d",&val);
}
//printf("***********val = %d\n",val);
switch(val)
{
case 1:
ioctl(fd, LED1, 0); //1灯亮
break;
case 2:
ioctl(fd, LED1, 1); //1灯灭
break;
case 3:
ioctl(fd, LED2, 0); //2灯亮
break;
case 4:
ioctl(fd, LED2, 1); //2灯灭
break;
case 5:
ioctl(fd, LED3, 0); //3灯亮
break;
case 6:
ioctl(fd, LED3, 1); //3灯灭
break;
case 7:
ioctl(fd, LED4, 0); //4灯亮
break;
case 8:
ioctl(fd, LED4, 1); //4灯灭
break;
default:
close(fd);
return 0;
}
}
close(fd);
return 0;
}
我正在使用Sequel构建一个愿望list系统。我有一个wishlists和itemstable和一个items_wishlists连接表(该名称是续集选择的名称)。items_wishlists表还有一个用于facebookid的额外列(因此我可以存储opengraph操作),这是一个NOTNULL列。我还有Wishlist和Item具有续集many_to_many关联的模型已建立。Wishlist类也有:selectmany_to_many关联的选项设置为select:[:items.*,:items_wishlists__facebook_action_id].有没有一种方法可以
我使用的是Firefox版本36.0.1和Selenium-Webdrivergem版本2.45.0。我能够创建Firefox实例,但无法使用脚本继续进行进一步的操作无法在60秒内获得稳定的Firefox连接(127.0.0.1:7055)错误。有人能帮帮我吗? 最佳答案 我遇到了同样的问题。降级到firefoxv33后一切正常。您可以找到旧版本here 关于ruby-无法在60秒内获得稳定的Firefox连接(127.0.0.1:7055),我们在StackOverflow上找到一个类
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
require"socket"server="irc.rizon.net"port="6667"nick="RubyIRCBot"channel="#0x40"s=TCPSocket.open(server,port)s.print("USERTesting",0)s.print("NICK#{nick}",0)s.print("JOIN#{channel}",0)这个IRC机器人没有连接到IRC服务器,我做错了什么? 最佳答案 失败并显示此消息::irc.shakeababy.net461*USER:Notenoughparame
考虑一下:现在这些情况:#output:http://domain.com/?foo=1&bar=2#output:http://domain.com/?foo=1&bar=2#output:http://domain.com/?foo=1&bar=2#output:http://domain.com/?foo=1&bar=2我需要用其他字符串输出URL。我如何保证&符号不会被转义?由于我无法控制的原因,我无法发送&。求助!把我的头发拉到这里:\编辑:为了澄清,我实际上有一个像这样的数组:@images=[{:id=>"fooid",:url=>"http://
我有一个super简单的脚本,它几乎包含了FayeWebSocketGitHub页面上用于处理关闭连接的内容:ws=Faye::WebSocket::Client.new(url,nil,:headers=>headers)ws.on:opendo|event|p[:open]#sendpingcommand#sendtestcommand#ws.send({command:'test'}.to_json)endws.on:messagedo|event|#hereistheentrypointfordatacomingfromtheserver.pJSON.parse(event.d