摄像头是机器人、监控、太空探索、社交媒体、工业自动化甚至娱乐业等多个领域不可或缺的一部分。 对于许多应用,必须了解相机的参数才能有效地将其用作视觉传感器。
在这篇文章中,您将了解相机校准所涉及的步骤及其意义。 我们还共享 C++ 和 Python 代码以及棋盘图案的示例图像。
估计相机参数的过程称为相机标定。
这意味着我们拥有确定现实世界中的 3D 点与其在该校准相机捕获的图像中对应的 2D 投影(像素)之间的准确关系所需的有关相机的所有信息(参数或系数)。
通常这意味着恢复两种参数:
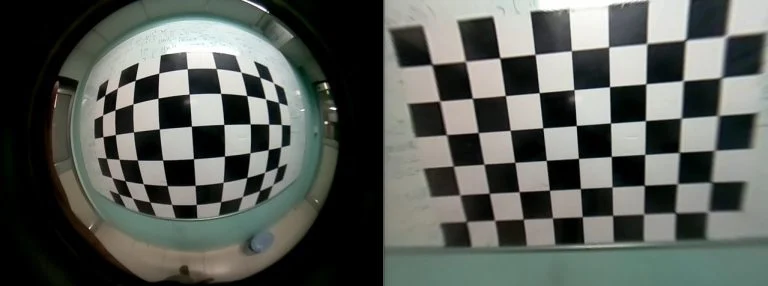
在下面的图像中,使用几何标定估计出的镜头参数来消除图像的畸变。
要找到 3D 点在图像平面上的投影,我们首先需要使用外部参数(旋转和平移)将点从世界坐标系转换到相机坐标系。
接下来,使用相机的内部参数,我们将点投影到图像平面上。
将世界坐标中的 3D 点 (X_w, Y_w, Z_w)与其在图像坐标中的投影 (u, v)相关联的方程如下所示:
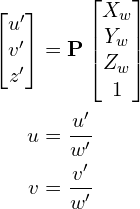
其中,P是一个 3×4 投影矩阵,由两部分组成 - 包含内在参数的内在矩阵 K 和由 3×3 旋转矩阵R和 3×1 平移向量t组合而成的外在矩阵 [R|t]。

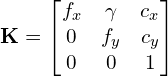
如前所述,内在矩阵 K 是上三角形矩阵。
f
x
,
f
y
f_x, f_y
fx,fy是 x 和 y 焦距(是的,它们通常是相同的)。
c
x
,
c
y
c_x, c_y
cx,cy是图像平面中光学中心的 x 和 y 坐标。使用图像的中心通常是一个足够好的近似值。
γ
\gamma
γ是轴之间的偏斜。通常为 0。
相机标定的目标是使用一组已知的 3D 点 ( X w , Y w , Z w ) (X_w, Y_w, Z_w) (Xw,Yw,Zw)及其对应的图像坐标 ( u , v ) (u,v) (u,v)找到 3×3 矩阵 K K K、3×3 旋转矩阵 R R R和 3×1 平移向量 t t t。当我们得到内在和外在参数的值时,相机就被称为是经过标定的。
综上所述,一个相机标定算法有以下输入和输出
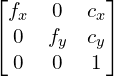
注意:在 OpenCV 中,相机内在矩阵没有 skew 参数。所以矩阵的形式是:
世界坐标系 :我们的世界坐标由附在房间墙壁上的棋盘图案固定。我们的 3D 点是棋盘中正方形的角。上面棋盘的任意一个角都可以选择为世界坐标系的原点。
X
X
X和
Y
Y
Y轴沿墙,
Z
Z
Z轴垂直于墙。因此,棋盘上的所有点都在 XY 平面上(即
Z
Z
Z= 0)。
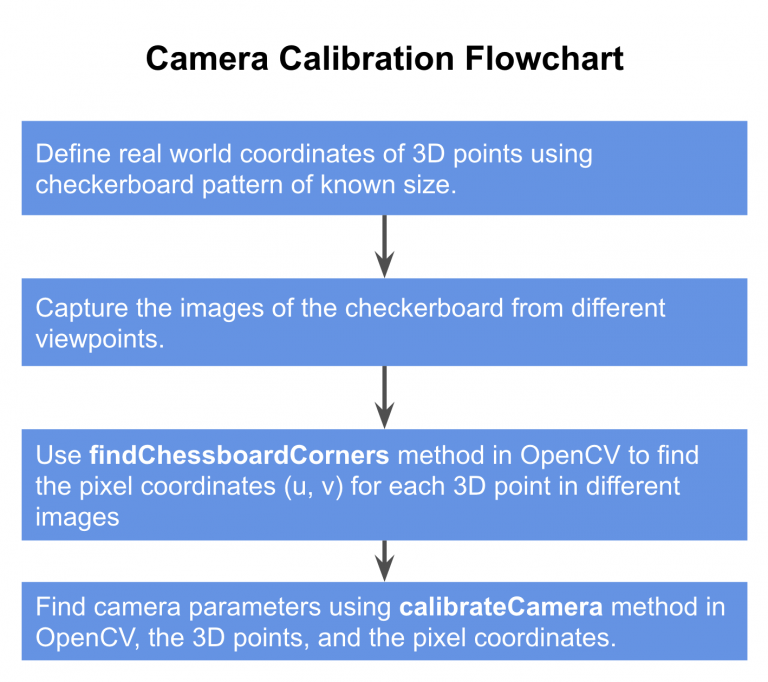
在标定过程中,我们通过一组已知的 3D ( X w , Y w , Z w ) (X_w, Y_w, Z_w) (Xw,Yw,Zw) 点及其在图像中对应的像素位置 ( u , v ) (u,v) (u,v)来计算相机参数。
对于 3D 点,我们在许多不同方向拍摄具有已知尺寸的棋盘图案。世界坐标附加到棋盘上,由于所有角点都位于一个平面上,我们选择每个点 Z w Z_w Zw坐标为 0。因为点在棋盘中是等距的,所以每个3D点的 ( X w , Y w ) (X_w, Y_w) (Xw,Yw)坐标很容易定义,方法是取一个点作为参考 ( 0 , 0 ) (0,0) (0,0),并根据该参考点定义其余的点。
为什么棋盘图案在校准中得到如此广泛的应用?
棋盘图案在图像中是独特且易于检测的。不仅如此,棋盘上正方形的角对于定位它们来说是非常理想的,因为它们在两个方向上都有明显的梯度。此外,这些角也与棋盘线的交点有关。所有这些事实都被用来确定棋盘图案中正方形的角。

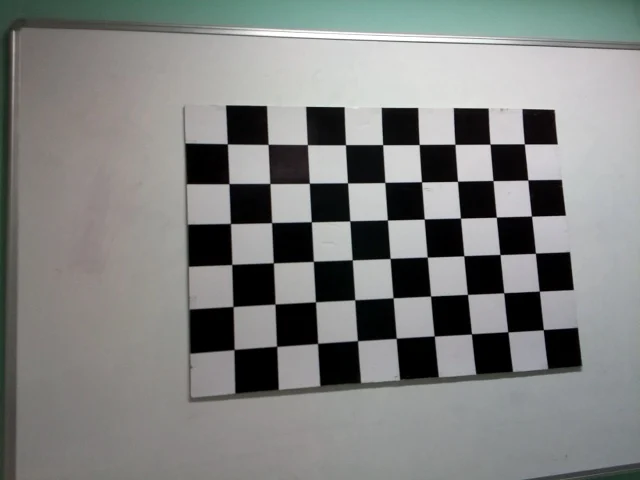
以上这些图像用于相机标定。
接下来,我们保持棋盘不动,并通过移动摄像机获取棋盘的多个图像。
或者,我们也可以保持相机不变,拍摄不同方向的棋盘图案。这两种情况在数学上是相似的。
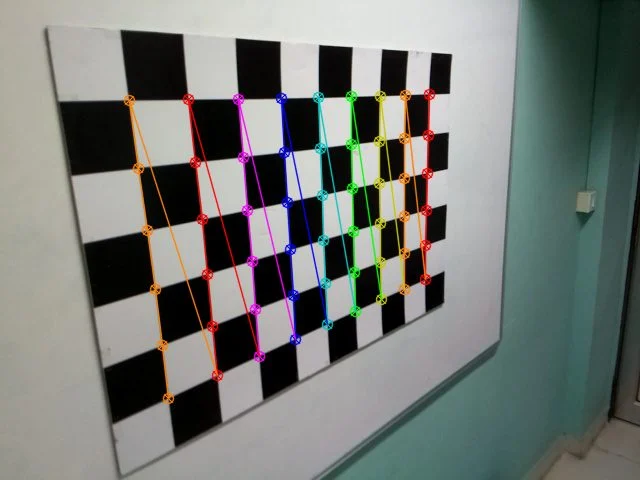
我们现在有多个棋盘图像。我们还知道棋盘上点在世界坐标中的 3D 位置。我们需要的最后一件事是图像中这些棋盘角的 2D 像素位置。
OpenCV 提供了一个名为 findChessboardCorners 的内置函数,它查找棋盘并返回角的坐标。让我们看看下面代码块中的用法。
C++
bool findChessboardCorners(InputArray image, Size patternSize, OutputArray corners, int flags = CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE )
Python
retval, corners = cv2.findChessboardCorners(image, patternSize, flags)
image:源棋盘视图。它必须是 8 位灰度或彩色图像。patternSize: 每个棋盘行和列的内角数( patternSize = cvSize (points_per_row, points_per_colum) = cvSize(columns,rows) )。corners: 检测到角的输出数组。flags: 各种操作标志。只有当事情不顺利时,您才需要担心这些。使用默认值。输出为true或false,取决于是否检测到棋盘格。
一切都是为了标定精度的。为了获得良好的结果,重要的是获得具有亚像素级别精度的角点位置。 OpenCV 的函数cornerSubPix 获取原始图像和角点位置,并在原始位置的一个小邻域内寻找最佳角点位置。该算法本质上是迭代的,因此我们需要指定终止标准(例如迭代次数和/或准确性)
C++
void cornerSubPix(InputArray image, InputOutputArray corners, Size winSize, Size zeroZone, TermCriteria criteria)
Python
cv2.cornerSubPix(image, corners, winSize, zeroZone, criteria)
image:输入图片。corners:输入角的初始坐标,输出提供的细化坐标。winSize: 搜索窗口边长的一半。zeroZone: 搜索区域中间的死亡区域的一半大小,下面的公式中没有对其求和。它有时用来避免自相关矩阵可能出现的奇点。(-1,-1)表示不存在该大小。criteria 终止角细化迭代过程的准则。也就是说,角位置细化过程在criteria.maxCount 迭代之后或在某个迭代中角位置移动小于criteria.epsilon 时停止。校准的最后一步是将世界坐标中的 3D 点及其在所有图像中的 2D 位置传递给 OpenCV 的 calibrateCamera 方法。该实现基于Zhengyou Zhang 的一篇论文。数学有点复杂,需要线性代数背景。
让我们看看 calibrateCamera 的语法
C++
double calibrateCamera(InputArrayOfArrays objectPoints, InputArrayOfArrays imagePoints, Size imageSize, InputOutputArray cameraMatrix, InputOutputArray distCoeffs, OutputArrayOfArrays rvecs, OutputArrayOfArrays tvecs)
Python
retval, cameraMatrix, distCoeffs, rvecs, tvecs = cv2.calibrateCamera(objectPoints, imagePoints, imageSize)
objectPoints: 3D 点向量的向量。 外部向量包含与视图数量一样多的元素。imagePoints: 二维图像点的向量。imageSize: 图像的大小cameraMatrix: 内在相机矩阵distCoeffs: 镜头畸变系数。这些系数将在以后的文章中解释。rvecs: 为 3×1 旋转向量。向量的方向指定旋转轴,向量的大小指定旋转角度。tvecs: 3×1 平移向量。下面分享了使用 Python 和 C++ 进行相机标定的代码。
请通读代码注释,它们解释了每个步骤的作用。
#!/usr/bin/env python
import cv2
import numpy as np
import os
import glob
# 定义棋盘格的尺寸
CHECKERBOARD = (6,9)
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 创建向量以存储每个棋盘图像的 3D 点向量
objpoints = []
# 创建向量以存储每个棋盘图像的 2D 点向量
imgpoints = []
# 定义 3D 点的世界坐标
objp = np.zeros((1, CHECKERBOARD[0] * CHECKERBOARD[1], 3), np.float32)
objp[0,:,:2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
prev_img_shape = None
# 提取存储在给定目录中的单个图像的路径
images = glob.glob('./images/*.jpg')
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 找到棋盘角
# 如果在图像中找到所需数量的角,则 ret = true
ret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD, cv2.CALIB_CB_ADAPTIVE_THRESH + cv2.CALIB_CB_FAST_CHECK + cv2.CALIB_CB_NORMALIZE_IMAGE)
"""
如果检测到所需数量的角, 我们细化像素坐标并可视化
"""
if ret == True:
objpoints.append(objp)
# 细化给定二维点的像素坐标。
corners2 = cv2.cornerSubPix(gray, corners, (11,11),(-1,-1), criteria)
imgpoints.append(corners2)
# 绘制并显示角
img = cv2.drawChessboardCorners(img, CHECKERBOARD, corners2, ret)
cv2.imshow('img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
h,w = img.shape[:2]
"""
通过传递已知 3D 点 (objpoints) 的值 和检测到的角点(imgpoints)对应的像素坐标 实现相机标定
"""
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
print("Camera matrix : \n")
print(mtx)
print("dist : \n")
print(dist)
print("rvecs : \n")
print(rvecs)
print("tvecs : \n")
print(tvecs)
#include <opencv2/opencv.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <stdio.h>
#include <iostream>
// 定义棋盘的尺寸
int CHECKERBOARD[2]{6,9};
int main()
{
// 创建向量以存储每个棋盘图像的 3D 点向量
std::vector<std::vector<cv::Point3f> > objpoints;
// 创建向量以存储每个棋盘图像的 2D 点向量
std::vector<std::vector<cv::Point2f> > imgpoints;
// 定义 3D 点的世界坐标
std::vector<cv::Point3f> objp;
for(int i{0}; i<CHECKERBOARD[1]; i++)
{
for(int j{0}; j<CHECKERBOARD[0]; j++)
objp.push_back(cv::Point3f(j,i,0));
}
// 提取存储在给定目录中的单个图像的路径
std::vector<cv::String> images;
// 包含棋盘图像的文件夹的路径
std::string path = "./images/*.jpg";
cv::glob(path, images);
cv::Mat frame, gray;
// 用于存储检测到的棋盘角的像素坐标的向量
std::vector<cv::Point2f> corner_pts;
bool success;
/* 循环遍历目录中的所有图像 */
for(int i{0}; i<images.size(); i++)
{
frame = cv::imread(images[i]);
cv::cvtColor(frame,gray,cv::COLOR_BGR2GRAY);
// 寻找棋盘角
// 如果在图像中找到所需数量的角,则成功 = true
success = cv::findChessboardCorners(gray, cv::Size(CHECKERBOARD[0], CHECKERBOARD[1]), corner_pts, CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FAST_CHECK | CV_CALIB_CB_NORMALIZE_IMAGE);
/*
如果检测到所需数量的角,们细化像素坐标并在棋盘格图像上显示它们
*/
if(success)
{
cv::TermCriteria criteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 30, 0.001);
// 细化给定二维点的像素坐标。
cv::cornerSubPix(gray,corner_pts,cv::Size(11,11), cv::Size(-1,-1),criteria);
// 在棋盘上显示检测到的角点
cv::drawChessboardCorners(frame, cv::Size(CHECKERBOARD[0], CHECKERBOARD[1]), corner_pts, success);
objpoints.push_back(objp);
imgpoints.push_back(corner_pts);
}
cv::imshow("Image",frame);
cv::waitKey(0);
}
cv::destroyAllWindows();
cv::Mat cameraMatrix,distCoeffs,R,T;
/*通过传递已知 3D 点 (objpoints) 的值 和检测到的角点(imgpoints)对应的像素坐标 实现相机标定*/
cv::calibrateCamera(objpoints, imgpoints, cv::Size(gray.rows,gray.cols), cameraMatrix, distCoeffs, R, T);
std::cout << "cameraMatrix : " << cameraMatrix << std::endl;
std::cout << "distCoeffs : " << distCoeffs << std::endl;
std::cout << "Rotation vector : " << R << std::endl;
std::cout << "Translation vector : " << T << std::endl;
return 0;
}
我正在学习如何使用Nokogiri,根据这段代码我遇到了一些问题:require'rubygems'require'mechanize'post_agent=WWW::Mechanize.newpost_page=post_agent.get('http://www.vbulletin.org/forum/showthread.php?t=230708')puts"\nabsolutepathwithtbodygivesnil"putspost_page.parser.xpath('/html/body/div/div/div/div/div/table/tbody/tr/td/div
我有一个Ruby程序,它使用rubyzip压缩XML文件的目录树。gem。我的问题是文件开始变得很重,我想提高压缩级别,因为压缩时间不是问题。我在rubyzipdocumentation中找不到一种为创建的ZIP文件指定压缩级别的方法。有人知道如何更改此设置吗?是否有另一个允许指定压缩级别的Ruby库? 最佳答案 这是我通过查看rubyzip内部创建的代码。level=Zlib::BEST_COMPRESSIONZip::ZipOutputStream.open(zip_file)do|zip|Dir.glob("**/*")d
类classAprivatedeffooputs:fooendpublicdefbarputs:barendprivatedefzimputs:zimendprotecteddefdibputs:dibendendA的实例a=A.new测试a.foorescueputs:faila.barrescueputs:faila.zimrescueputs:faila.dibrescueputs:faila.gazrescueputs:fail测试输出failbarfailfailfail.发送测试[:foo,:bar,:zim,:dib,:gaz].each{|m|a.send(m)resc
很好奇,就使用rubyonrails自动化单元测试而言,你们正在做什么?您是否创建了一个脚本来在cron中运行rake作业并将结果邮寄给您?git中的预提交Hook?只是手动调用?我完全理解测试,但想知道在错误发生之前捕获错误的最佳实践是什么。让我们理所当然地认为测试本身是完美无缺的,并且可以正常工作。下一步是什么以确保他们在正确的时间将可能有害的结果传达给您? 最佳答案 不确定您到底想听什么,但是有几个级别的自动代码库控制:在处理某项功能时,您可以使用类似autotest的内容获得关于哪些有效,哪些无效的即时反馈。要确保您的提
假设我做了一个模块如下:m=Module.newdoclassCendend三个问题:除了对m的引用之外,还有什么方法可以访问C和m中的其他内容?我可以在创建匿名模块后为其命名吗(就像我输入“module...”一样)?如何在使用完匿名模块后将其删除,使其定义的常量不再存在? 最佳答案 三个答案:是的,使用ObjectSpace.此代码使c引用你的类(class)C不引用m:c=nilObjectSpace.each_object{|obj|c=objif(Class===objandobj.name=~/::C$/)}当然这取决于
我正在尝试使用ruby和Savon来使用网络服务。测试服务为http://www.webservicex.net/WS/WSDetails.aspx?WSID=9&CATID=2require'rubygems'require'savon'client=Savon::Client.new"http://www.webservicex.net/stockquote.asmx?WSDL"client.get_quotedo|soap|soap.body={:symbol=>"AAPL"}end返回SOAP异常。检查soap信封,在我看来soap请求没有正确的命名空间。任何人都可以建议我
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
在控制台中反复尝试之后,我想到了这种方法,可以按发生日期对类似activerecord的(Mongoid)对象进行分组。我不确定这是完成此任务的最佳方法,但它确实有效。有没有人有更好的建议,或者这是一个很好的方法?#eventsisanarrayofactiverecord-likeobjectsthatincludeatimeattributeevents.map{|event|#converteventsarrayintoanarrayofhasheswiththedayofthemonthandtheevent{:number=>event.time.day,:event=>ev
我在我的项目目录中完成了compasscreate.和compassinitrails。几个问题:我已将我的.sass文件放在public/stylesheets中。这是放置它们的正确位置吗?当我运行compasswatch时,它不会自动编译这些.sass文件。我必须手动指定文件:compasswatchpublic/stylesheets/myfile.sass等。如何让它自动运行?文件ie.css、print.css和screen.css已放在stylesheets/compiled。如何在编译后不让它们重新出现的情况下删除它们?我自己编译的.sass文件编译成compiled/t
我想将html转换为纯文本。不过,我不想只删除标签,我想智能地保留尽可能多的格式。为插入换行符标签,检测段落并格式化它们等。输入非常简单,通常是格式良好的html(不是整个文档,只是一堆内容,通常没有anchor或图像)。我可以将几个正则表达式放在一起,让我达到80%,但我认为可能有一些现有的解决方案更智能。 最佳答案 首先,不要尝试为此使用正则表达式。很有可能你会想出一个脆弱/脆弱的解决方案,它会随着HTML的变化而崩溃,或者很难管理和维护。您可以使用Nokogiri快速解析HTML并提取文本:require'nokogiri'h