本篇文章记录在安装ROS时碰到的rosdep update超时问题,并记录了为解决这个问题我所尝试的解决方法。相关环境为Ubuntu20.04,ROS Noetic。
安装ros的最后一步是rosdep init和rosdep update,rosdep是解决ros包依赖问题的一个工具。
rosdep init会从ros官方服务器上下载一个“20-default.list”文件,放在“/etc/ros/rosdep/sources.list.d/”路径下。“20-default.list”里是一些yaml文件的网址,这些yaml文件里保存着一些ros工具或者常见ros包的依赖关系,即这些ros工具或者ros包依赖于哪些其它ros包。这一步网上相关教程说会出问题,但我自己试的时候很流畅,没有出问题。
当执行rosdep update,rosdep会尝试访问yaml文件内的网址,把yaml里的信息转存到本地,这样当配置上述ros工具或者ros包时,ros会按照依赖关系自动把所需的依赖一并下载。
由于rosdep update需要访问github,国内对于github的访问是经常出问题的,在这一步经常会因为网络问题而失败。失败图片如下:

所以,无论是哪种解决方案,其核心都是使得rosdep update命令能够访问到相应的文件。在解决过程中,一共尝试了三种解决方案,成功了两种。
由于是因为访问github失败,所以首先想到的方法是修改DNS,因为通过修改DNS可以流畅的访问github。
修改dns后,效果:

可以看到,这个方法让我多前进了几步,但是仍旧无法完成rosdep update。
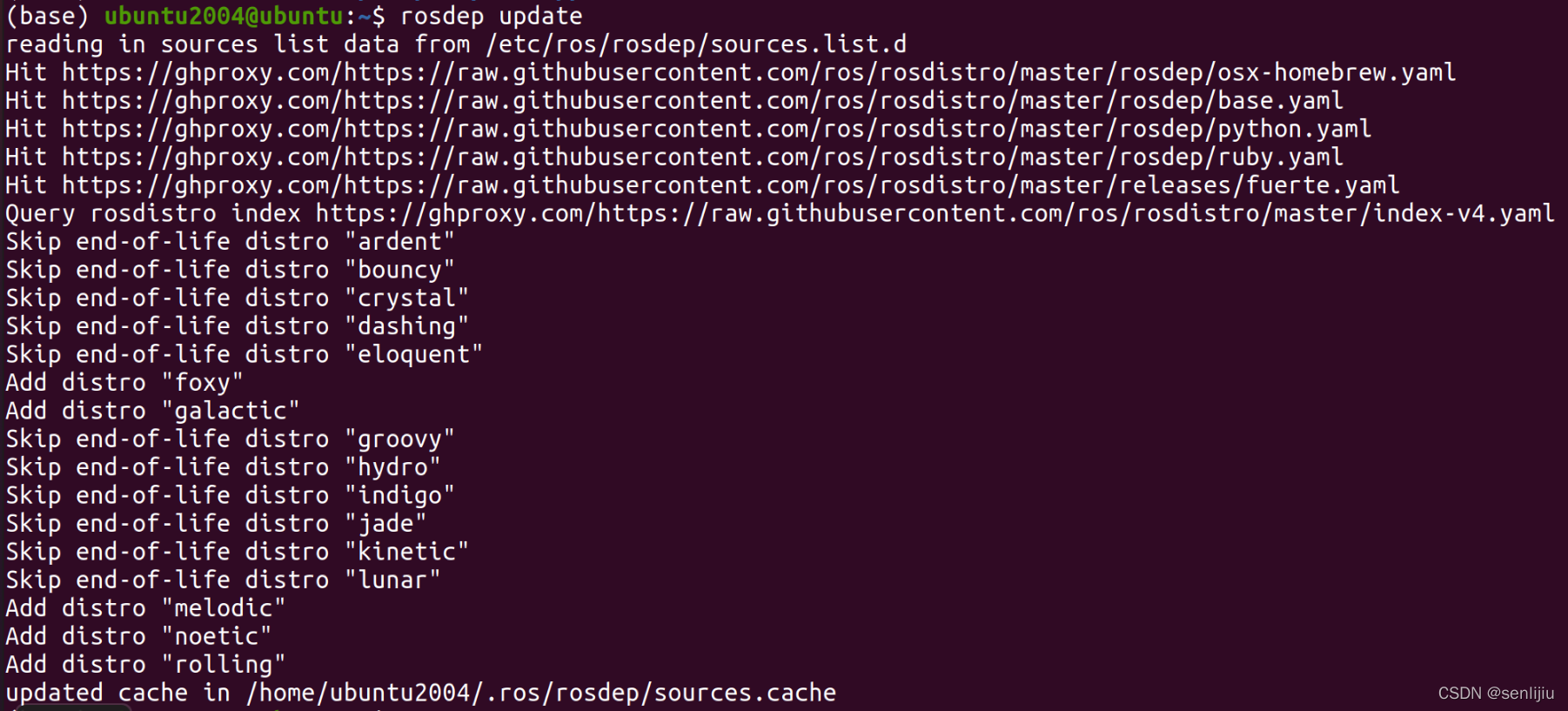
网站https://ghproxy.com/支持github的资源代理,可以用此代理加速rosdep对Github的访问,进而解决rosdep update失败问题。我们要在rosdep的若干个脚本文件中,把 https://ghproxy.com/ 添加到相应URL前。该方法参考rosdep update 超时失败2021最新解决方法。
下述要修改的文件中,由于我是Ubuntu20.04,ROS Noetic,相关文件在python3路径下,其他版本安装路径可能不一样,可以用find命令在系统中查找。如对文件1,可用命令:sudo find / -name rep3.py进行查找,查找结果如下:

关于find命令的更多用法,可以参考linux下快速查找文件
修改文件1:/usr/lib/python3/dist-packages/rosdep2/rep3.py
# REP3_TARGETS_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/releases/targets.yaml'
REP3_TARGETS_URL = 'https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/releases/targets.yaml'
修改文件2:/usr/lib/python3/dist-packages/rosdistro/__init__.py
# DEFAULT_INDEX_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
DEFAULT_INDEX_URL = 'https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
修改文件3:/etc/ros/rosdep/sources.list.d/20-default.list
# os-specific listings first
yaml https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx
# generic
yaml https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
yaml https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
yaml https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
gbpdistro https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
再执行rosdep update,成功:
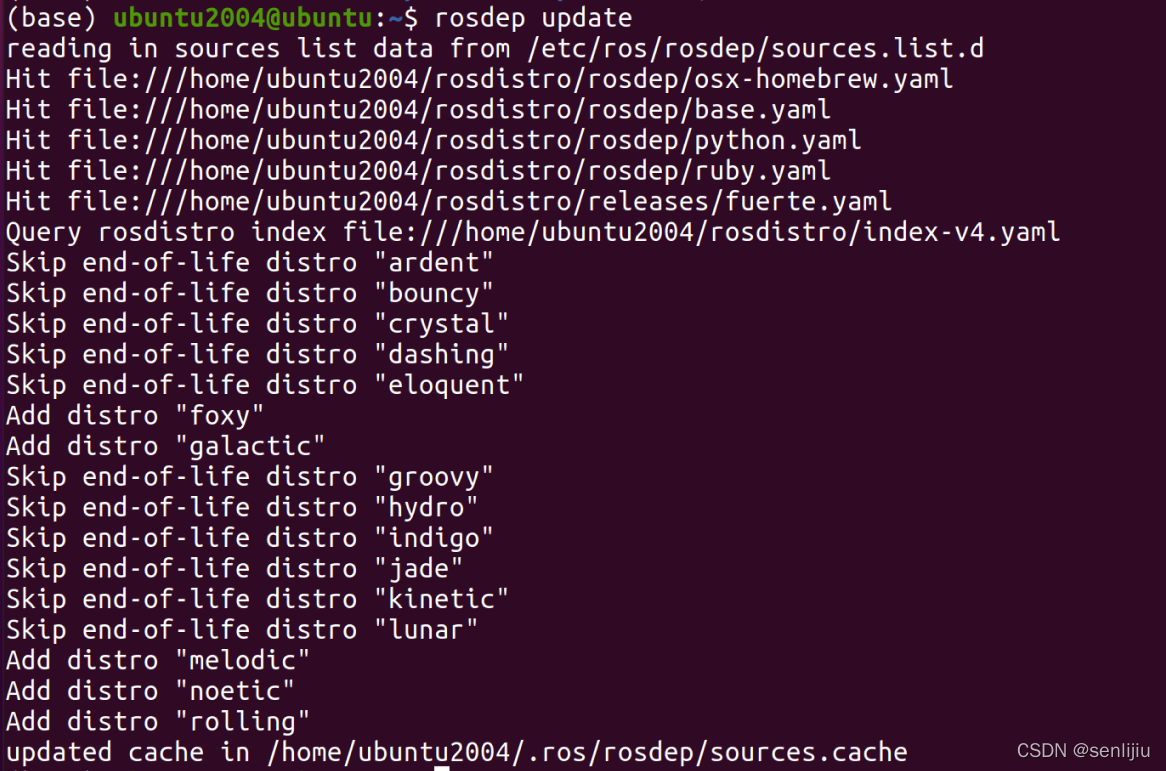
该方法核心思想就是将难以访问的文件通过一定办法保存到本地,然后直接访问本地文件。该方法参考一定能解决ROS系统 rosdep update超时问题de简单方法。
一共有七个yaml文件需要获取,获取方法多样。
git命令下载git clone https://github.com/ros/rosdistro.git
https://raw.githubusercontent.com/ros/rosdistro/master/releases/targets.yaml
https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml
现在我们已经获取了需要的文件,只需要将对应的路径设置为刚下载来的文件就好。记录rosdistro存放地址,我存放在/home/ubuntu2004/rosdistro。根据自己存放文件路径的不同,下面修改后的值也不同。
修改文件1:/usr/lib/python3/dist-packages/rosdep2/rep3.py
# REP3_TARGETS_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/releases/targets.yaml'
REP3_TARGETS_URL = REP3_TARGETS_URL = 'file:///home/ubuntu2004/rosdistro/releases/targets.yaml'
修改文件2:/usr/lib/python3/dist-packages/rosdistro/__init__.py
# DEFAULT_INDEX_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
DEFAULT_INDEX_URL = DEFAULT_INDEX_URL = 'file:///home/ubuntu2004/rosdistro/index-v4.yaml'
修改文件3:/etc/ros/rosdep/sources.list.d/20-default.list
# os-specific listings first
yaml file:///home/ubuntu2004/rosdistro/rosdep/osx-homebrew.yaml osx
# generic
yaml file:///home/ubuntu2004/rosdistro/rosdep/base.yaml
yaml file:///home/ubuntu2004/rosdistro/rosdep/python.yaml
yaml file:///home/ubuntu2004/rosdistro/rosdep/ruby.yaml
gbpdistro file:///home/ubuntu2004/rosdistro/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
再执行rosdep update,成功:
完成 😃,希望对卡在rosdep update的大家有帮助。
我正在学习如何使用Nokogiri,根据这段代码我遇到了一些问题:require'rubygems'require'mechanize'post_agent=WWW::Mechanize.newpost_page=post_agent.get('http://www.vbulletin.org/forum/showthread.php?t=230708')puts"\nabsolutepathwithtbodygivesnil"putspost_page.parser.xpath('/html/body/div/div/div/div/div/table/tbody/tr/td/div
总的来说,我对ruby还比较陌生,我正在为我正在创建的对象编写一些rspec测试用例。许多测试用例都非常基础,我只是想确保正确填充和返回值。我想知道是否有办法使用循环结构来执行此操作。不必为我要测试的每个方法都设置一个assertEquals。例如:describeitem,"TestingtheItem"doit"willhaveanullvaluetostart"doitem=Item.new#HereIcoulddotheitem.name.shouldbe_nil#thenIcoulddoitem.category.shouldbe_nilendend但我想要一些方法来使用
类classAprivatedeffooputs:fooendpublicdefbarputs:barendprivatedefzimputs:zimendprotecteddefdibputs:dibendendA的实例a=A.new测试a.foorescueputs:faila.barrescueputs:faila.zimrescueputs:faila.dibrescueputs:faila.gazrescueputs:fail测试输出failbarfailfailfail.发送测试[:foo,:bar,:zim,:dib,:gaz].each{|m|a.send(m)resc
我正在尝试设置一个puppet节点,但rubygems似乎不正常。如果我通过它自己的二进制文件(/usr/lib/ruby/gems/1.8/gems/facter-1.5.8/bin/facter)在cli上运行facter,它工作正常,但如果我通过由rubygems(/usr/bin/facter)安装的二进制文件,它抛出:/usr/lib/ruby/1.8/facter/uptime.rb:11:undefinedmethod`get_uptime'forFacter::Util::Uptime:Module(NoMethodError)from/usr/lib/ruby
我想了解Ruby方法methods()是如何工作的。我尝试使用“ruby方法”在Google上搜索,但这不是我需要的。我也看过ruby-doc.org,但我没有找到这种方法。你能详细解释一下它是如何工作的或者给我一个链接吗?更新我用methods()方法做了实验,得到了这样的结果:'labrat'代码classFirstdeffirst_instance_mymethodenddefself.first_class_mymethodendendclassSecond使用类#returnsavailablemethodslistforclassandancestorsputsSeco
我在我的项目中添加了一个系统来重置用户密码并通过电子邮件将密码发送给他,以防他忘记密码。昨天它运行良好(当我实现它时)。当我今天尝试启动服务器时,出现以下错误。=>BootingWEBrick=>Rails3.2.1applicationstartingindevelopmentonhttp://0.0.0.0:3000=>Callwith-dtodetach=>Ctrl-CtoshutdownserverExiting/Users/vinayshenoy/.rvm/gems/ruby-1.9.3-p0/gems/actionmailer-3.2.1/lib/action_mailer
设置:狂欢ruby1.9.2高线(1.6.13)描述:我已经相当习惯在其他一些项目中使用highline,但已经有几个月没有使用它了。现在,在Ruby1.9.2上全新安装时,它似乎不允许在同一行回答提示。所以以前我会看到类似的东西:require"highline/import"ask"Whatisyourfavoritecolor?"并得到:Whatisyourfavoritecolor?|现在我看到类似的东西:Whatisyourfavoritecolor?|竖线(|)符号是我的终端光标。知道为什么会发生这种变化吗? 最佳答案
我已经从我的命令行中获得了一切,所以我可以运行rubymyfile并且它可以正常工作。但是当我尝试从sublime中运行它时,我得到了undefinedmethod`require_relative'formain:Object有人知道我的sublime设置中缺少什么吗?我正在使用OSX并安装了rvm。 最佳答案 或者,您可以只使用“require”,它应该可以正常工作。我认为“require_relative”仅适用于ruby1.9+ 关于ruby-主要:Objectwhenrun
我有一个具有一些属性的模型:attr1、attr2和attr3。我需要在不执行回调和验证的情况下更新此属性。我找到了update_column方法,但我想同时更新三个属性。我需要这样的东西:update_columns({attr1:val1,attr2:val2,attr3:val3})代替update_column(attr1,val1)update_column(attr2,val2)update_column(attr3,val3) 最佳答案 您可以使用update_columns(attr1:val1,attr2:val2
我不确定传递给方法的对象的类型是否正确。我可能会将一个字符串传递给一个只能处理整数的函数。某种运行时保证怎么样?我看不到比以下更好的选择:defsomeFixNumMangler(input)raise"wrongtype:integerrequired"unlessinput.class==FixNumother_stuffend有更好的选择吗? 最佳答案 使用Kernel#Integer在使用之前转换输入的方法。当无法以任何合理的方式将输入转换为整数时,它将引发ArgumentError。defmy_method(number)