本文旨在让您对Modbus有一个很直观的了解,总结关于Modbus相关的知识,非常适合初学的同学,同时如有错误,欢迎修改意见和建议,将在第一时间修改
在了解什么是Modbus之前,我们先来看下什么是协议
协议是一个汉语词汇,读音为xié yì,意思是共同计议,协商;经过谈判、协商而制定的共同承认、共同遵守的文件。
简单地说,在我们的单片机之间互相通信,以及单片机和上位机通信中,规定了不同的内容规范,这个规范是通信的双方都需要遵守的,这样就可以实现两者的通信。
而这个协议规范可以有很多种,来适应不同的设备以及通信要求等,我们常见的就有IIC SPI UART串口通信协议等等。而Modbus也是一个串行通信协议。

我们在看Modbus的时候,经常会看到485串口,232串口,这些是什么呢?
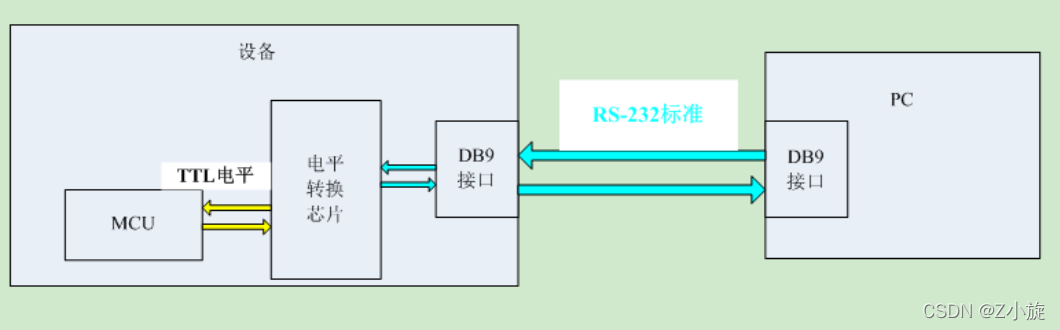
RS232,RS485是一种电平标准
数据在通信双方之间传输,本质是传输物理的电平 比方说传输5V的电压 -1V的电压信号,这些物理信号在传输过程中会受到很多干扰,比方说你传输一个5V的电压,到了接收端可能就变成了4.8V,并且通信的双方高低电平的参考电压可能不同。
那么这个时候就需要一个电平标准,来判断多少V的电压是高电平 1,多少V的电压是低电平 0 这就诞生了 RS-485 RS-232
RS232:是电子工业协会(Electronic Industries Association,EIA) 制定的异步传输标准接口,同时对应着电平标准和通信协议(时序),其电平标准:+3V~+15V对应0,-3V~-15V对应1。
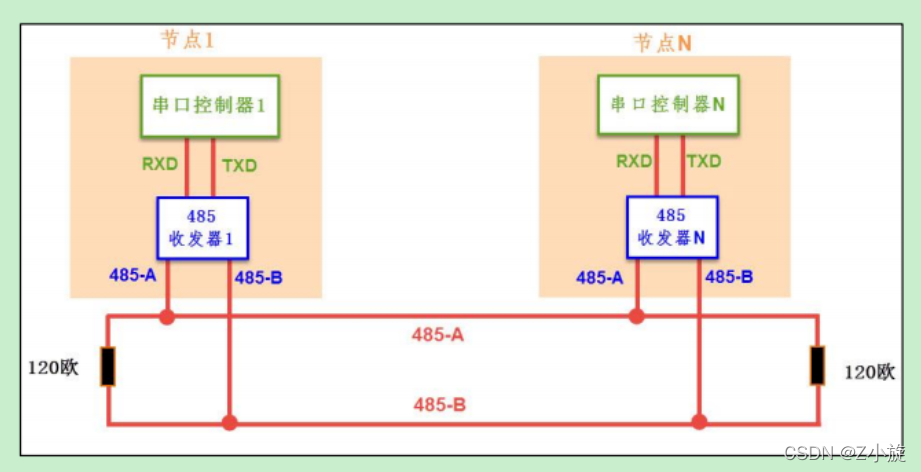
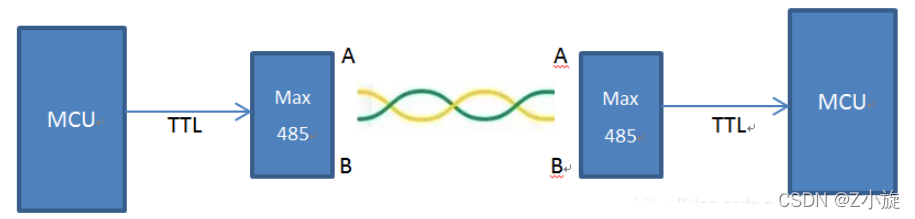
RS485:RS485是一种串口接口标准,为了长距离传输采用差分方式传输,传输的是差分信号,抗干扰能力比RS232强很多。两线压差为-2~-6V表示0,两线压差为+2~+6V表示1
如果还想继续了解可以看博主的这个博文:
USB转串口 TTL RS-232 RS-485 COM口 UART区别
也就是RS-485电平标准确定传输过来的数据是0还是1,在此基础上,这些字节数据根据modbus通信协议来进行数据的交互传输。
硬件层协议:解决0和1的可靠传输,常有RS232、RS485、CAN、IIC、SPI …
软件层协议:解决传输目的,常有Modbus、TCP/IP、CANopen …
Modbus诞生于1979年 莫迪康公司 后来被施耐德电气公司收购。Modbus提供通用语言用于彼此通信的设备和设备。
Modbus已经成为工业领域通信协议的业界标准,并且现在是工业电子设备之间常用的连接方式。Modbus作为目前工业领域应用最广泛的协议
最简单的说,Modbus就是一个总线通信协议,像IIC SPI这种,但是他不依赖于硬件总线
Modbus之所以使用广泛,是有他的优点的
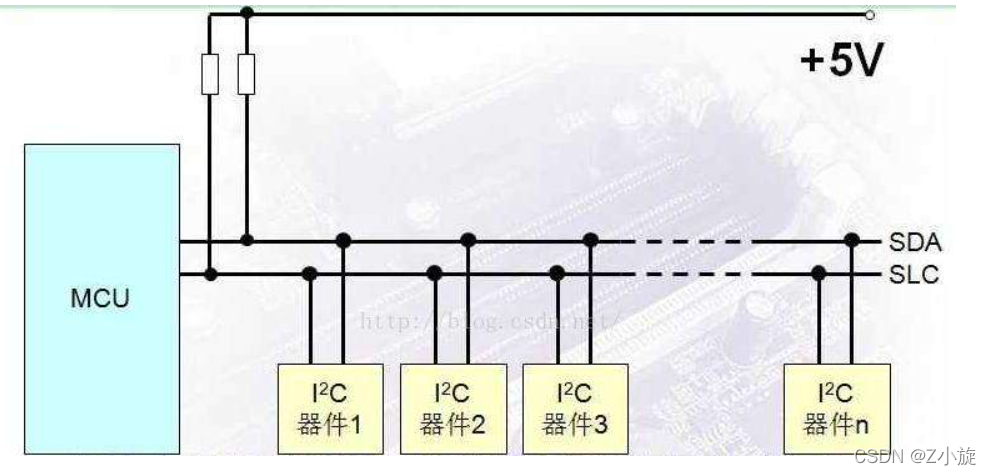
举一个简单的例子,我们常用的IIC通信协议,需要在物理上连接iic总线,然后加上拉电阻,规定好物理层的高低电平。
而 Modbus协议是一种应用层报文传输协议,协议本身并没有定义物理层,定义了控制器能够认识和使用的消息结构,不管它们是经过何种网络进行通信的。 所以能够适应多种电气接口,因此使用非常广泛。
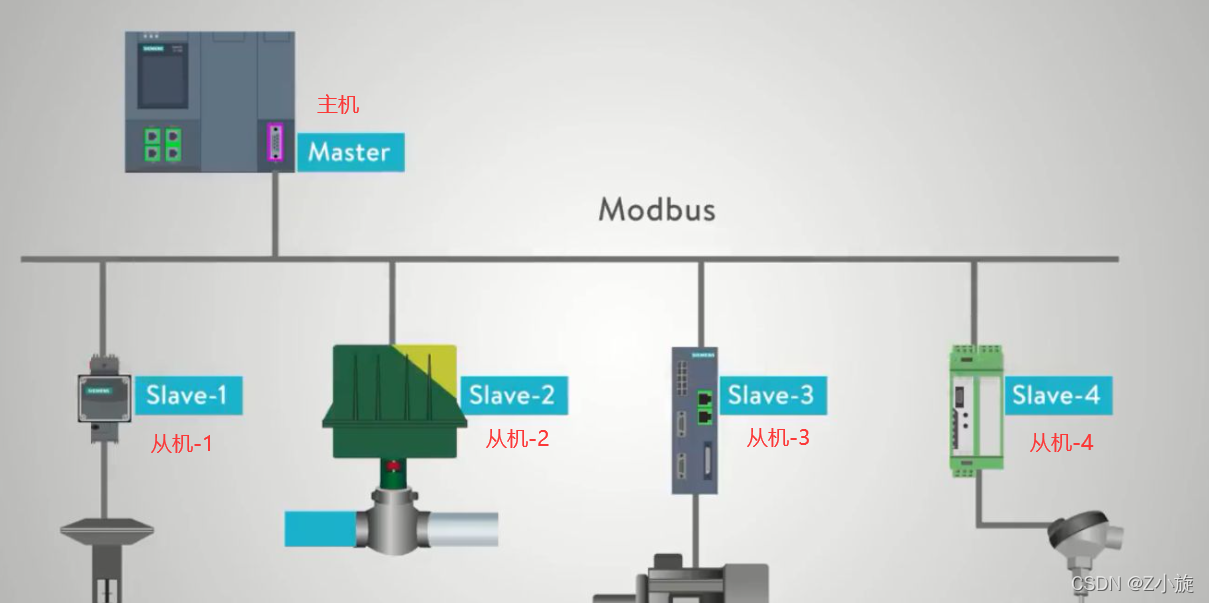
注意Modbus是一主多从的通信协议
Modbus通信中只有一个设备可以发送请求。其他从设备接收主机发送的数据来进行响应,从机是任何外围设备,如I/O传感器,阀门,网络驱动器,或其他测量类型的设备。从站处理信息和使用Modbus将其数据发送给主站。
也就是说,不能Modbus同步进行通信,主机在同一时间内只能向一个从机发送请求,总线上每次只有一个数据进行传输,即主机发送,从机应答,主机不发送,总线上就没有数据通信。
从机不会自己发送消息给主站,只能回复从主机发送的消息请求。
并且,Modbus并没有忙机制判断,比方说主机给从机发送命令, 从机没有收到或者正在处理其他东西,这时候就不能响应主机,因为modbus的总线只是传输数据,没有其他仲裁机制,所以需要通过软件的方式来判断是否正常接收。
现在,我们来探讨Modbus数据传输的方式,可以简单地理解成打电话。并且是单向通信的打电话
主机发送数据,首先需要从机的电话号码(区分每个从机,每个地址必须唯一),告诉从机打电话要干什么事情,然后是需要发送的内容,最后再问问从机,我说的话你都听清楚了没有呀,没有听错吧?
然后从机这里,得到了主机打过来的电话,从机回复主机需要的内容,主机得到从机数据,这样就是一个主机到从机的通信过程
就好比老师和你打电话,老师拨通了你的电话号,然后老师跟你说,小王呀,我这里需要你给我发东西,发的内容是上周的一周总结,你说好的,然后打开你电脑的文件夹,把你的周报发给老师,这就是一个通信过程。
既然从机存储数据,那么肯定要有一个存储区,那就需要文件操作,我们都知道这文件可以分为只读(-r)和读写(-wr)两种类型
并且存储的数据类型可以分为 :布尔量 和 16位寄存器
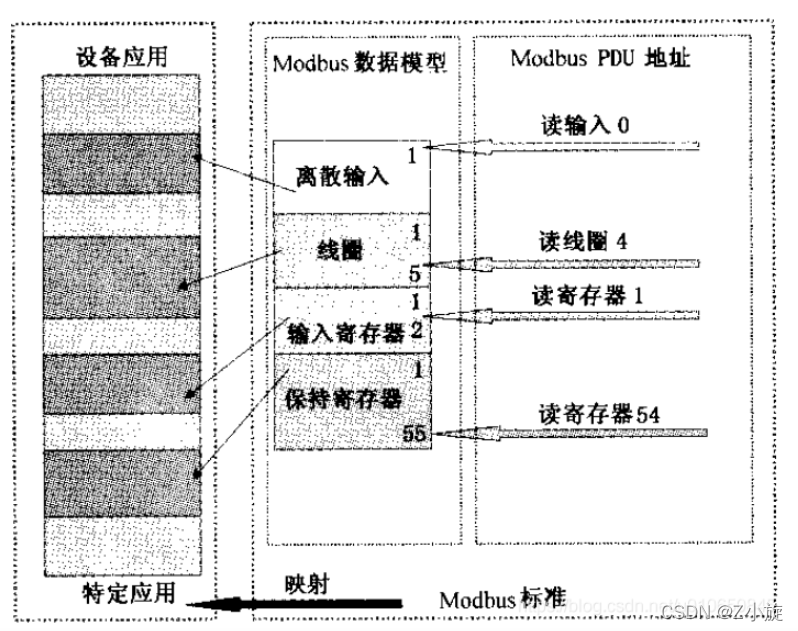
Modbus协议规定了4个存储区 分别是0 1 3 4区 其中1区和4区是可读可写,1区和3区是只读。
| 区号 | 名称 | 读写 | 地址范围 |
|---|---|---|---|
| 0区 | 输出线圈 | 可读可写布尔量 | 00001-09999 |
| 1区 | 输入线圈 | 只读布尔量 | 10001-19999 |
| 3区 | 输入寄存器 | 只读寄存器 | 30001-39999 |
| 4区 | 保持寄存器 | 可读可写寄存器 | 40001-49999 |
并且Modbus还给每个区都划分了地址范围 主机向从机获取数据时,只需要告诉从机数据的起始地址,还有获取多少字节的数据,从机就可以发送数据给主机
Modbus数据模型规定了具体的地址范围,每一个从机,都有实际的物理存储,跟modbus的存储区相对应,主机读写从机的存储区,实际上就是对从机设备对应的实际存储空间进行读写。
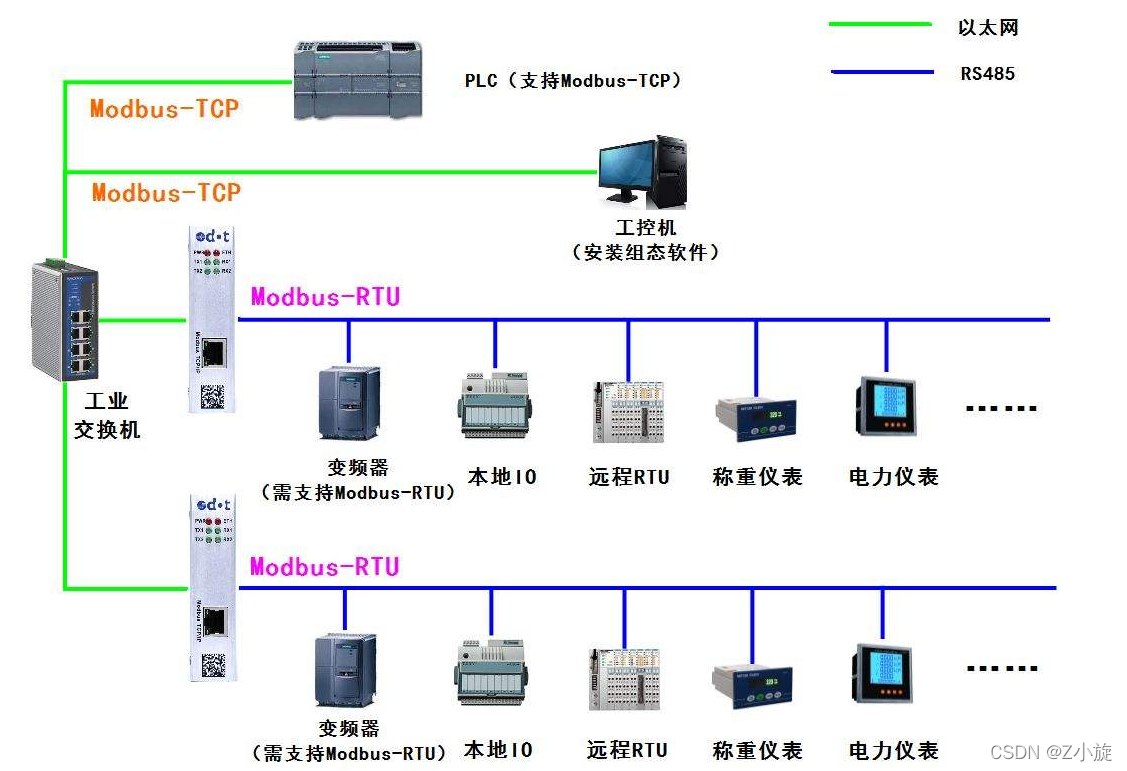
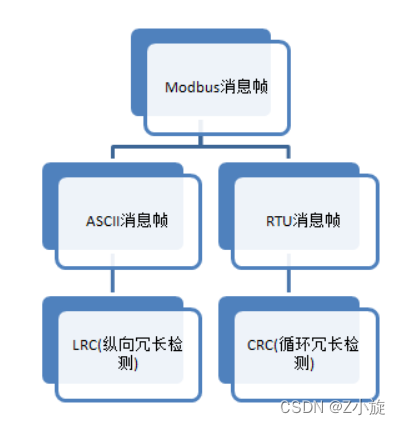
在上面我们已经说明了Modbus可以在各种介质上传输,那么他的传输模式也分为三种。包括ASCII、RTU(远程终端控制系统)、TCP三种报文类型
串行端口存在多个版本的Modbus协议,而最常见的是下面四种:
Modbus RTU是一种紧凑的,十六进制表示数据的方式,Modbus ASCII是一种采用Ascii码表示数据,并且每个8Bit 字节都作为两个ASCII字符发送的表示方式。
RTU格式后续的命令/数据带有循环冗余校验的校验和,而ASCII格式采用纵向冗余校验的校验和。
Modbus协议使用串口传输时可以选择RTU或ASCII模式,并规定了消息、数据结构、命令和应答方式并需要对数据进行校验。ASCII 模式采用LRC校验,RTU模式采用16 位CRC校验。通过以太网传输时使用TCP,这种模式不使用校验,因为TCP协议是一个面向连接的可靠协议。
当然常用的就是RTU模式,ASCII一般很少
举一个简单的例子,如果我们需要发送一个数字10 那么RTU模式下,只需要发送 0x0A 总线上传输数据形式为: 0000 1010
而ASCII码模式则将数据1和0转为’1’和’0’,需要发送0x31(1) 0x30(0)两个字节数据。总线上传输数据形式为: 0011 0001 0011 0000
详细的我们等下再阐述
一个报文就是一帧数据,一个数据帧就一个报文: 指的是一串完整的指令数据,本质就是一串数据。
Modbus报文是指主机发送给从机的一帧数据,其中包含着从机的地址,主机想执行的操作,校验码等内容
Modbus协议在串行链路上的报文格式如下所示:

| 从站地址 | 功能码 | 数据 | CRC/LRC |
|---|---|---|---|
| 1 byte | 1 byte | N bytes | 2 bytes |
- 帧结构 = 从机地址 + 功能吗 + 数据 + 校验
从机地址: 每个从机都有唯一地址,占用一个字节,范围0-255,其中有效范围是1-247,其中255是广播地址(广播就是对所有从机发送应答)
功能码: 占用一个字节,功能码的意义就是,知道这个指令是干啥的,比如你可以查询从机的数据,也可以修改从机的数据,所以不同功能码对应不同功能.
数据: 根据功能码不同,有不同功能,比方说功能码是查询从机的数据,这里就是查询数据的地址和查询字节数等。
校验: 在数据传输过程中可能数据会发生错误,CRC检验检测接收的数据是否正确
Modbus规定了多个功能,那么为了方便的使用这些功能,我们给每个功能都设定一个功能码,也就是指代码。
Modbus协议同时规定了二十几种功能码,但是常用的只有8种,用于对存储区的读写,如下表所示:
| 功能码 | 功能说明 |
|---|---|
| 01H | 读取输出线圈 |
| 02H | 读取输入线圈 |
| 03H | 读取保持寄存器 |
| 04H | 读取输入寄存器 |
| 05H | 写入单线圈 |
| 06H | 写入单寄存器 |
| 0FH | 写入多线圈 |
| 10H | 写入多寄存器 |
当然我们用的最多的就是03和06 一个是读取数据,一个是修改数据。
错误校验(CRC)域占用两个字节包含了一个16位的二进制值。CRC值由传输设备计算出来,然后附加到数据帧上,接收设备在接收数据时重新计算CRC值,然后与接收到的CRC域中的值进行比较,如果这两个值不相等,就发生了错误。
比如主机发出01 06 00 01 00 17 98 04, 98 04 两个字节是校验位,那么从机接收到后要根据01 06 00 01 00 17 再计算CRC校验值,从机判断自己计算出来的CRC校验是否与接收的CRC校验(98 04主机计算的)相等,如果不相等那么说明数据传输有错误,这些数据就不能要。
CRC校验流程:
1、预置一个16位寄存器为0FFFFH(全1),称之为CRC寄存器。
2 、把数据帧中的第一个字节的8位与CRC寄存器中的低字节进行异或运算,结果存回CRC寄存器。
3、将CRC寄存器向右移一位,最高位填以0,最低位移出并检测。
4 、如果最低位为0:重复第三步(下一次移位);如果最低位为1:将CRC寄存器与一个预设的固定值(0A001H)进行异或运算。
5、重复第三步和第四步直到8次移位。这样处理完了一个完整的八位。
6 、重复第2步到第5步来处理下一个八位,直到所有的字节处理结束。
7、最终CRC寄存器的值就是CRC的值。
此外还有一种利用预设的表格计算CRC的方法,它的主要特点是计算速度快,但是表格需要较大的存储空间,该方法此处不在阐述

下面我们来看详细的发送和接收数据:
1、主机对从机读数据操作
主机发送报文格式如下:
| 从站地址 | 功能码 | 起始(高) | 起始(低) | 数量(高) | 数量(低) | 校验 |
|---|---|---|---|---|---|---|
| 0x01 | 0x03 | 0x00 | 0x01 | 0x00 | 0x01 | 0xD5 0xCA |
含义:
0x01:从机的地址
0x03:查询功能,读取从机寄存器的数据
0x00 0x01: 代表读取的起始寄存器地址.说明从0x0001开始读取.
0x00 0x01: 查询的寄存器数量为0x0001个 Modbus把数据存放在寄存器中,通过查询寄存器来得到不同变量的值,一个寄存器地址对应2字节数据; 寄存器地址对应着从机实际的存储地址
0xD5 0xCA: 循环冗余校验 CRC
从机回复报文格式如下:
| 从站地址 | 功能码 | 字节计数 | 字节1 |字节2 | 校验 |
|–|–|-|-|-|-|-|
| 0x01 | 0x03| 0x02| 0x01 | 0x00| 0x17| 0xF8 0x4A |
含义:
0x01:从机的地址
0x03:查询功能,读取从机寄存器的数据
0x02: 返回字节数为2个 一个寄存器2个字节
0x00 0x17:寄存器的值是0017
0xF8 0x4A: 循环冗余校验 CRC
2、主机对从机写数据操作
主机发送报文格式如下:
| 从站地址 | 功能码 | 数据地址(高) | 数据地址(低) | 数据(高) | 数据(低) | 校验 |
|---|---|---|---|---|---|---|
| 0x01 | 0x06 | 0x00 | 0x01 | 0x00 | 0x17 | 0x98 0x04 |
含义:
0x01:从机的地址
0x06:修改功能,修改从机寄存器的数据
0x00 0x01: 代表修改的起始寄存器地址.说明修改0x0000-0x0001的存储内容
0x00 0x17: 要修改的数据值为0017
0x98 0x04: 循环冗余校验 CRC
从机回复报文格式如下:
| 从站地址 | 功能码 | 数据地址(高) | 数据地址(低) | 数据(高) | 数据(低) | 校验 |
|---|---|---|---|---|---|---|
| 0x01 | 0x06 | 0x00 | 0x01 | 0x00 | 0x17 | 0x98 0x04 |
含义:
0x01:从机的地址
0x06:修改功能,修改从机寄存器的数据
0x00 0x01: 代表修改的起始寄存器地址.说明是0x0000
0x00 0x17:修改的值为0017
0x98 0x04: 循环冗余校验 CRC
从机的回复和主机的发送是一样的,如果不一样说明出现了错误
在消息中的每个字节都作为两个ASCII字符发送
十六进制的0-F 分别对应ASCII字符的0…9,A…F
也就是0x30~0x3A 0x41~0x46

下方是ascii的报文帧
1个字节起始位
2个字节地址位
2个字节功能位
n个数据位,最小的有效位先发送
LRC(纵向冗长检测) 注意校验方式不同
结束符 \r \n

可以看到数据部分更加繁琐,正常我们使用都是用RTU格式,ASCII码格式有了解即可。
总结:
ModbusASCII有开始字符(和结束字符(CR LF),可以作为一帧数据开始和结束的标志,而ModbusRTU没有这样的标志,需要用时间间隔来判断一帧报文的开始和结束,协议规定的时间为3.5个字符周期,就是说一帧报文开始前,必须有大于3.5个字符周期的空闲时间,一帧报文结束后,也必须要有3.5个字符周期的空闲时间否则就会出现粘包的情况。
注意:针对3.5个字符周期,其实是一个具体时间,但是这个时间跟波特率相关。
在串口通信中,1个字符包括1位起始位、8位数据位(一般情况)、1位校验位(或者没有)、1位停止位(一般情况下),因此1个字符包括11个位,那么3.5个字符就是38.5个位,波特率表示的含义是每秒传输的二进制位的个位,因此如果是9600波特率,3.5个字符周期=/960038.5=0.00401s1000=4.01ms
我们首先看下Modbus-TCP和Modbus-ACSII的区别
Modbus-TCP并不需要从从机地址,而是需要MBAP报文头
并且不需要差错校验,因为TCP本身就具有校验差错的能力
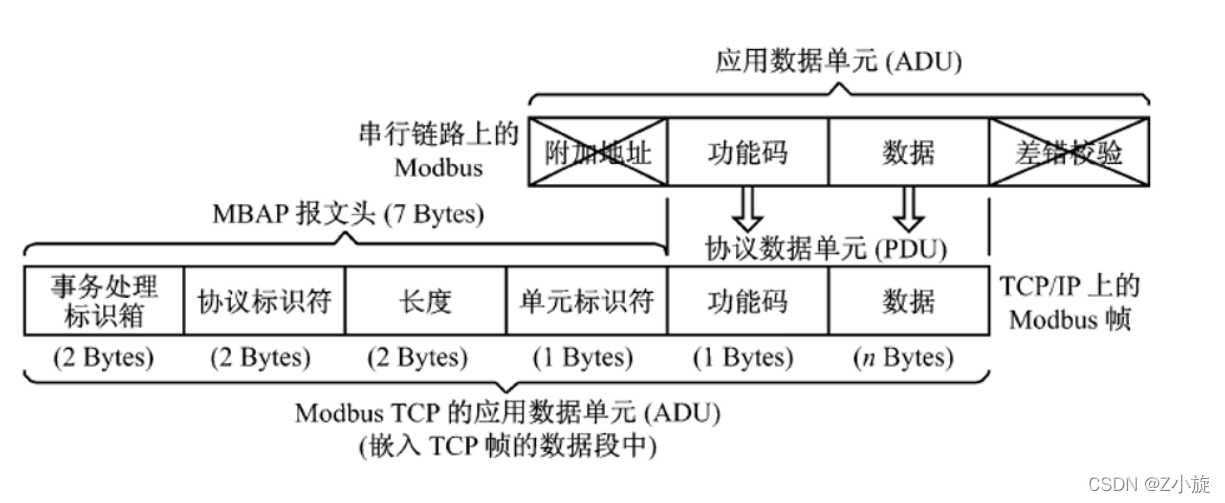
MBAP报文头格式如下:
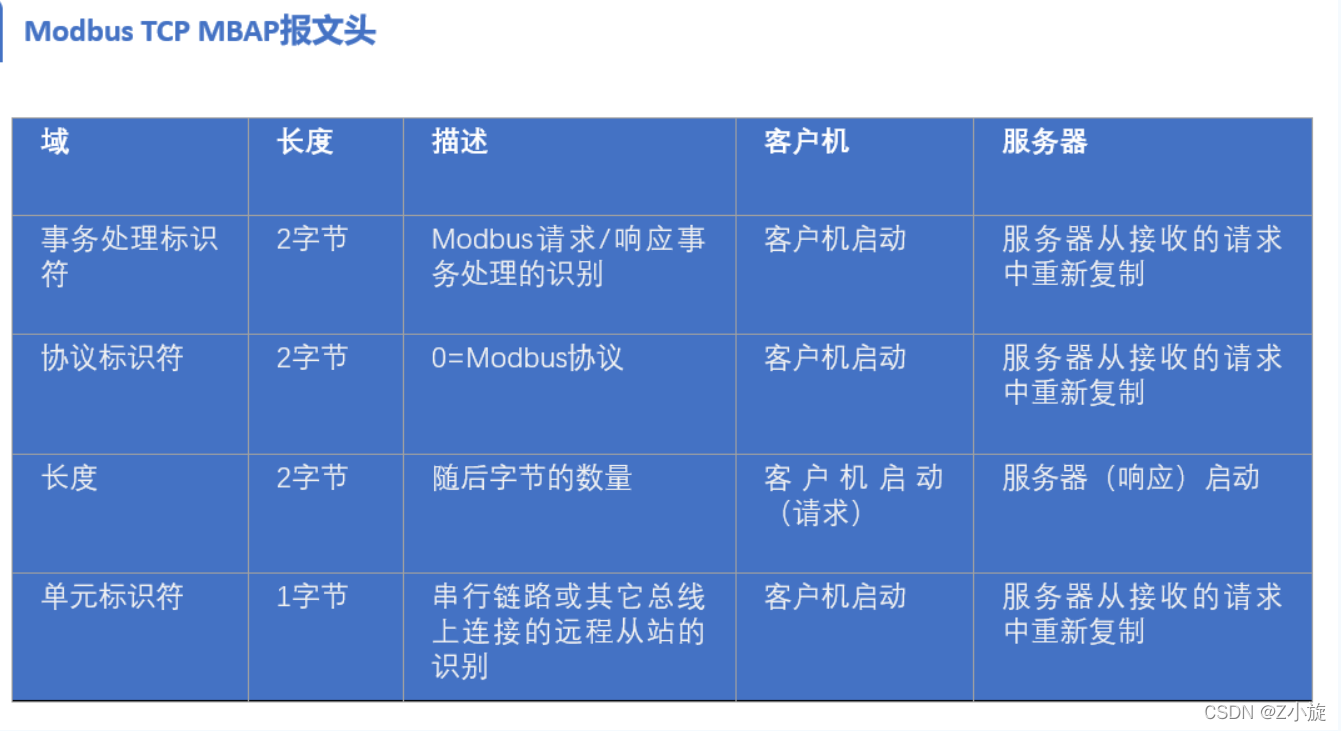
其中事务处理表示符合协议标识符我们正常使用设置为0即可 长度为6个字节 0x0006
简单来说,也就是Modbus-TCP是在Modbus-ACSII的基础上,去掉校验,然后加上五个字节的0和一个06
最后附上 Modbus标准协议手册链接
Modbus标准协议手册

我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
我正在学习Ruby,遇到了inject。我正处于理解它的风口浪尖,但当我是那种需要真实世界的例子来学习一些东西的人时。我遇到的最常见的例子是人们使用inject来添加一个(1..10)范围的总和,我不太关心这个。这是一个任意的例子。在实际程序中我会用它做什么?我正在学习,所以我可以继续使用Rails,但我不必有一个以Web为中心的示例。我只需要一些我可以全神贯注的目标。谢谢大家。 最佳答案 inject有时可以通过它的“其他”名称reduce更好地理解。它是一个对Enumerable进行操作(迭代一次)并返回单个值的函数。它有许多有
尝试通过SSL连接到ImgurAPI时出现错误。这是代码和错误:API_URI=URI.parse('https://api.imgur.com')API_PUBLIC_KEY='Client-ID--'ENDPOINTS={:image=>'/3/image',:gallery=>'/3/gallery'}#Public:Uploadanimage##args-Theimagepathfortheimagetoupload#defupload(image_path)http=Net::HTTP.new(API_URI.host)http.use_ssl=truehttp.verify
一、什么是MQTT协议MessageQueuingTelemetryTransport:消息队列遥测传输协议。是一种基于客户端-服务端的发布/订阅模式。与HTTP一样,基于TCP/IP协议之上的通讯协议,提供有序、无损、双向连接,由IBM(蓝色巨人)发布。原理:(1)MQTT协议身份和消息格式有三种身份:发布者(Publish)、代理(Broker)(服务器)、订阅者(Subscribe)。其中,消息的发布者和订阅者都是客户端,消息代理是服务器,消息发布者可以同时是订阅者。MQTT传输的消息分为:主题(Topic)和负载(payload)两部分Topic,可以理解为消息的类型,订阅者订阅(Su
TCL脚本语言简介•TCL(ToolCommandLanguage)是一种解释执行的脚本语言(ScriptingLanguage),它提供了通用的编程能力:支持变量、过程和控制结构;同时TCL还拥有一个功能强大的固有的核心命令集。TCL经常被用于快速原型开发,脚本编程,GUI和测试等方面。•实际上包含了两个部分:一个语言和一个库。首先,Tcl是一种简单的脚本语言,主要使用于发布命令给一些互交程序如文本编辑器、调试器和shell。由于TCL的解释器是用C\C++语言的过程库实现的,因此在某种意义上我们又可以把TCL看作C库,这个库中有丰富的用于扩展TCL命令的C\C++过程和函数,所以,Tcl是
Mongoid::Paranoia向生成标准的模型添加默认范围#{"$exists"=>false}},options:{},class:Line,embedded:false>我可以使用生成的Model.deleted找到已删除的文档,#{"$exists"=>true}},options:{},class:Line,embedded:false>我如何覆盖它以便我可以搜索已删除和未删除的文档。PSModel.unscoped不起作用 最佳答案 试试这个(它是一种hack):classUserincludeMongoid::Doc
一、RIPV2协议简介 RIP(RoutingInformationProtocol)路由协议是一种相对古老,在小型以及同介质网络中得到了广泛应用的一种路由协议。RIP采用距离向量算法,是一种距离向量协议。RIP-1是有类别路由协议(ClassfulRoutingProtocol),它只支持以广播方式发布协议报文。RIP-1的协议报文无法携带掩码信息,它只能识别A、B、C类这样的自然网段的路由,因此RIP-1不支持非连续子网(DiscontiguousSubnet)。RIP-2是一种无类别路由协议(ClasslessRoutingProtocol),支持路由标记,在路由策略中可根据路由标记对
开门见山|拉取镜像dockerpullelasticsearch:7.16.1|配置存放的目录#存放配置文件的文件夹mkdir-p/opt/docker/elasticsearch/node-1/config#存放数据的文件夹mkdir-p/opt/docker/elasticsearch/node-1/data#存放运行日志的文件夹mkdir-p/opt/docker/elasticsearch/node-1/log#存放IK分词插件的文件夹mkdir-p/opt/docker/elasticsearch/node-1/plugins若你使用了moba,直接右键新建即可如上图所示依次类推创建