 今年 8 月,华为创始人任正非预言全球经济将会持续衰退、消费能力大幅下降,要“把寒气传递给每个人”。最先感受到寒气就是前沿领域的高科技行业,这些行业耗资巨大,而且在短期内无法带来收益。自动驾驶行业就是典型的代表。在过去一个月,Argo AI、Velodyne这些赫赫有名的big name或倒闭或合并,让业界每一个人都感受到了寒气。任总给出的“过冬方案”是将公司的经营方针从追求规模转向追求利润和现金流。落在自动驾驶行业,可行之道是先放下L4-L5级自动驾驶的远大理想,抽出一部分精力来完善L2+级驾驶辅助,以期尽快实现商业化落地,带来实打实的收入。作为领先的自动驾驶厂商,百度正在这么做。
今年 8 月,华为创始人任正非预言全球经济将会持续衰退、消费能力大幅下降,要“把寒气传递给每个人”。最先感受到寒气就是前沿领域的高科技行业,这些行业耗资巨大,而且在短期内无法带来收益。自动驾驶行业就是典型的代表。在过去一个月,Argo AI、Velodyne这些赫赫有名的big name或倒闭或合并,让业界每一个人都感受到了寒气。任总给出的“过冬方案”是将公司的经营方针从追求规模转向追求利润和现金流。落在自动驾驶行业,可行之道是先放下L4-L5级自动驾驶的远大理想,抽出一部分精力来完善L2+级驾驶辅助,以期尽快实现商业化落地,带来实打实的收入。作为领先的自动驾驶厂商,百度正在这么做。 相比前五个部分的技术进展,第六个部分更加值得我们关注,这是涉及到百度自动驾驶商业模式的转变。自动百度 “All in AI” 进军自动驾驶领域以来,一直都是对标 Waymo 等头部厂商,以实现 L4-L5 级自动驾驶为目标。高举高打的结果是不接地气。几年下来,百度投入了海量的研发资金,取得了不小的成绩,但是一方面普通用户对其技术先进性缺乏感知,另一方面车企对无法落地的技术缺乏兴趣。在前几天发布的文章《百度 Robotaxi 做到世界第一,也带不动自动驾驶的商业化》中,我们明确提出,百度的 Robotaxi 业务红火,但是带来的收入极为有限,自动驾驶商业化的重点应该在 B 端。提出“ L4/L2+ 技术共生路线”,说明百度要加大对 L2+ 级驾驶辅助技术的投入,加速商业化落地。
相比前五个部分的技术进展,第六个部分更加值得我们关注,这是涉及到百度自动驾驶商业模式的转变。自动百度 “All in AI” 进军自动驾驶领域以来,一直都是对标 Waymo 等头部厂商,以实现 L4-L5 级自动驾驶为目标。高举高打的结果是不接地气。几年下来,百度投入了海量的研发资金,取得了不小的成绩,但是一方面普通用户对其技术先进性缺乏感知,另一方面车企对无法落地的技术缺乏兴趣。在前几天发布的文章《百度 Robotaxi 做到世界第一,也带不动自动驾驶的商业化》中,我们明确提出,百度的 Robotaxi 业务红火,但是带来的收入极为有限,自动驾驶商业化的重点应该在 B 端。提出“ L4/L2+ 技术共生路线”,说明百度要加大对 L2+ 级驾驶辅助技术的投入,加速商业化落地。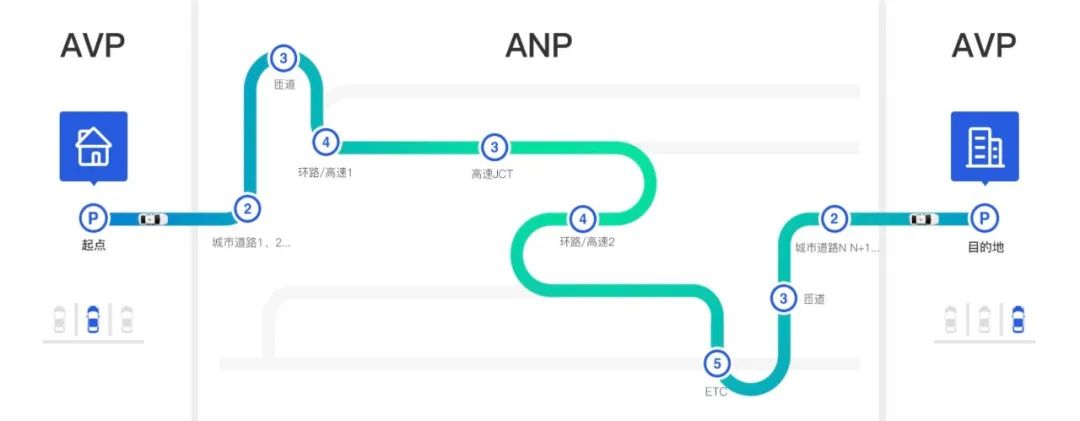
 在软件方面,ANP 3.0 的视觉方案基于Apollo Lite++ 纯视觉感知框架。Apollo Lite 号称视觉感知领域世界唯三、中国唯一支持城市道路‘纯视觉’自动驾驶的感知系统,可以支持L4级自动驾驶,在其基础上发展而来的 Apollo Lite++ 应对 L2+ 级场景自然绰绰有余。高精地图是保障 L2+ 城市级智驾产品高安全、体验好的必需必要条件,但是高额的成本让高精地图无法普及。借助于AI技术,百度高精地图构建自动化率已达到 96%,从而大幅降低了成本。ANP 3.0采用“轻量”高精地图,依托算法来精进降低高精地图的制作成本,并且可以实现车端实时建图。和同类型的产品相比,百度 ANP 3.0 应该会有一定的优势,据了解,ANP 3.0 于明年率先搭载于百度和吉利合作的集度 ROBO-01 车型上,它的表现非常值得期待。
在软件方面,ANP 3.0 的视觉方案基于Apollo Lite++ 纯视觉感知框架。Apollo Lite 号称视觉感知领域世界唯三、中国唯一支持城市道路‘纯视觉’自动驾驶的感知系统,可以支持L4级自动驾驶,在其基础上发展而来的 Apollo Lite++ 应对 L2+ 级场景自然绰绰有余。高精地图是保障 L2+ 城市级智驾产品高安全、体验好的必需必要条件,但是高额的成本让高精地图无法普及。借助于AI技术,百度高精地图构建自动化率已达到 96%,从而大幅降低了成本。ANP 3.0采用“轻量”高精地图,依托算法来精进降低高精地图的制作成本,并且可以实现车端实时建图。和同类型的产品相比,百度 ANP 3.0 应该会有一定的优势,据了解,ANP 3.0 于明年率先搭载于百度和吉利合作的集度 ROBO-01 车型上,它的表现非常值得期待。 想了解更多关于开源的内容,请访问:51CTO 开源基础软件社区https://ost.51cto.com。
想了解更多关于开源的内容,请访问:51CTO 开源基础软件社区https://ost.51cto.com。 很好奇,就使用rubyonrails自动化单元测试而言,你们正在做什么?您是否创建了一个脚本来在cron中运行rake作业并将结果邮寄给您?git中的预提交Hook?只是手动调用?我完全理解测试,但想知道在错误发生之前捕获错误的最佳实践是什么。让我们理所当然地认为测试本身是完美无缺的,并且可以正常工作。下一步是什么以确保他们在正确的时间将可能有害的结果传达给您? 最佳答案 不确定您到底想听什么,但是有几个级别的自动代码库控制:在处理某项功能时,您可以使用类似autotest的内容获得关于哪些有效,哪些无效的即时反馈。要确保您的提
我收到这个错误:RuntimeError(自动加载常量Apps时检测到循环依赖当我使用多线程时。下面是我的代码。为什么会这样?我尝试多线程的原因是因为我正在编写一个HTML抓取应用程序。对Nokogiri::HTML(open())的调用是一个同步阻塞调用,需要1秒才能返回,我有100,000多个页面要访问,所以我试图运行多个线程来解决这个问题。有更好的方法吗?classToolsController0)app.website=array.join(',')putsapp.websiteelseapp.website="NONE"endapp.saveapps=Apps.order("
我们目前正在为ROR3.2开发自定义cms引擎。在这个过程中,我们希望成为我们的rails应用程序中的一等公民的几个类类型起源,这意味着它们应该驻留在应用程序的app文件夹下,它是插件。目前我们有以下类型:数据源数据类型查看我在app文件夹下创建了多个目录来保存这些:应用/数据源应用/数据类型应用/View更多类型将随之而来,我有点担心应用程序文件夹被这么多目录污染。因此,我想将它们移动到一个子目录/模块中,该子目录/模块包含cms定义的所有类型。所有类都应位于MyCms命名空间内,目录布局应如下所示:应用程序/my_cms/data_source应用程序/my_cms/data_ty
我最喜欢的Google文档功能之一是它会在我工作时不断自动保存我的文档版本。这意味着即使我在进行关键更改之前忘记在某个点进行保存,也很有可能会自动创建一个保存点。至少,我可以将文档恢复到错误更改之前的状态,并从该点继续工作。对于在MacOS(或UNIX)上运行的Ruby编码器,是否有具有等效功能的工具?例如,一个工具会每隔几分钟自动将Gitcheckin我的本地存储库以获取我正在处理的文件。也许我有点偏执,但这点小保险可以让我在日常工作中安心。 最佳答案 虚拟机有些人可能讨厌我对此的回应,但我在编码时经常使用VIM,它具有自动保存功
我有以下有趣的场景:我已经通过RVM安装了ruby1.9.2,它预打包了bundler1.1.4。我的应用程序需要bundler1.0.15。我试过运行以下命令:gemuninstallbundler我得到以下信息:INFO:gem"bundler"isnotinstalled有什么想法可以降级我的bundler吗?谢谢。 最佳答案 找到解决方案。显然rvm在所有gemspec可见的全局gemspec中安装它的gem。所以通过这样做:rvmuse1.9.2@global然后是:gemuninstallbundler成功了。这也可
我想知道是否可以通过自动创建数组来插入数组,如果数组不存在的话,就像在PHP中一样:$toto[]='titi';如果尚未定义$toto,它将创建数组并将“titi”压入。如果已经存在,它只会推送。在Ruby中我必须这样做:toto||=[]toto.push('titi')可以一行完成吗?因为如果我有一个循环,它会测试“||=”,除了第一次:Person.all.eachdo|person|toto||=[]#with1billionofperson,thislineisuseless999999999times...toto.push(person.name)你有更好的解决方案吗?
文章目录1.自动驾驶实战:基于Paddle3D的点云障碍物检测1.1环境信息1.2准备点云数据1.3安装Paddle3D1.4模型训练1.5模型评估1.6模型导出1.7模型部署效果附录show_lidar_pred_on_image.py1.自动驾驶实战:基于Paddle3D的点云障碍物检测项目地址——自动驾驶实战:基于Paddle3D的点云障碍物检测课程地址——自动驾驶感知系统揭秘1.1环境信息硬件信息CPU:2核AI加速卡:v100总显存:16GB总内存:16GB总硬盘:100GB环境配置Python:3.7.4框架信息框架版本:PaddlePaddle2.4.0(项目默认框架版本为2.3
我不确定如何为我的搜索功能添加自动完成表单。"get"do%>nil%>我有一个具有自定义操作的Controllerdefquery@users=Search.user(params[:query])@article=Search.article(params[:query])end模型如下:defself.user(search)ifsearchUser.find(:all,:conditions=>['first_nameLIKE?',"%#{search}%"])elseUser.find(:all)endenddefself.article(search)ifsearchArt
我对自动测试的工作方式的印象(基于cucumbergithubwiki和其他在线内容)是它应该重新运行红色示例,直到它们通过。我的问题是它会重新运行规范文件中找到失败示例的所有示例,包括通过的示例。我不想浪费时间在修复失败示例的同时重新运行通过的示例。是否可以配置自动测试以便仅运行失败的示例? 最佳答案 您需要rspec-retrygem。以下是文档中有关如何实现它的一些示例:将它应用到覆盖整个测试套件的configureblock中...RSpec.configuredo|config|config.verbose_retry=t
代码:threads=[]Thread.abort_on_exception=truebegin#throwexceptionsinthreadssowecanseethemthreadseputs"EXCEPTION:#{e.inspect}"puts"MESSAGE:#{e.message}"end崩溃:.rvm/gems/ruby-2.1.3@req/gems/activesupport-4.1.5/lib/active_support/dependencies.rb:478:inload_missing_constant':自动加载常量MyClass时检测到循环依赖稍加研究后,