目录
非常详细的相机标定原理、步骤(一)_An efforter的博客-CSDN博客_最详细、最完整的相机标定讲解
非常详细的相机标定原理(三)(张正友相机标定法初见和单应性矩阵)_An efforter的博客-CSDN博客 非常详细的相机标定原理(四)(张正友相机标定法数学推导求解)_An efforter的博客-CSDN博客
非常详细的相机标定(五)(相机标定代码讲解)_An efforter的博客-CSDN博客
像素坐标系uov是一个二维直角坐标系,反映了相机CCD/CMOS芯片中像素的排列情况。
原点Oo位于图像的左上角,u轴、v轴分别于像面的两边平行。
像素坐标系中坐标轴的单位是像素(整数)。
根据下面图能够看出来,两种坐标系都是在一个平面上。
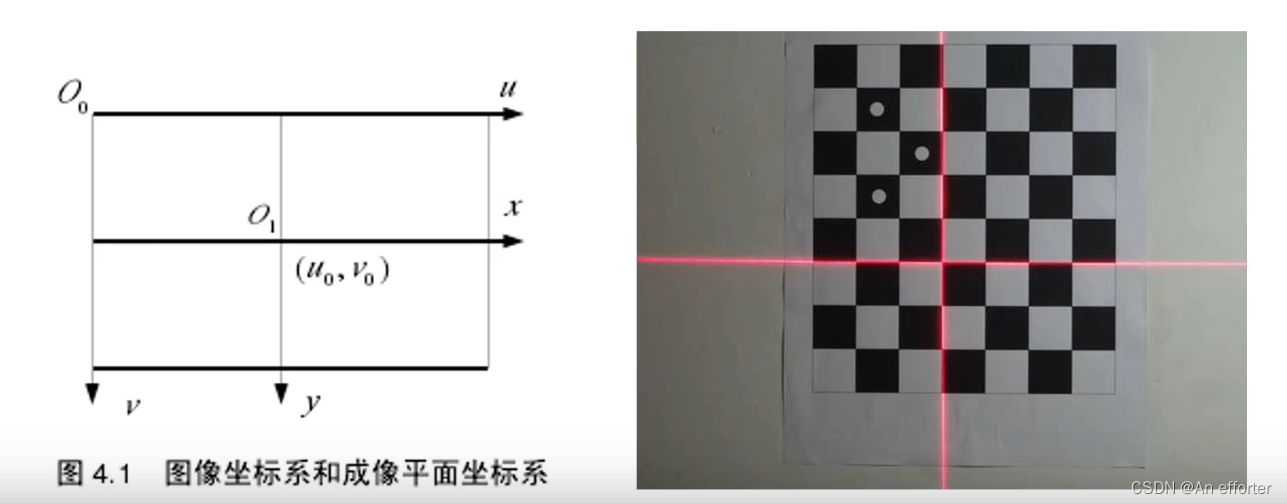
像素坐标系不利于坐标变换,因此需要建立图像坐标系XOY,其坐标轴的单位通常为毫米(mm),原点是相机光轴与相面的交点(称为主点),即图像的中心点。
X轴、Y轴分别与u轴、v轴平行,故两个坐标系实际是平移关系,即可以通过平移就可得到。像素坐标系中坐标轴的单位是像素(整数)。
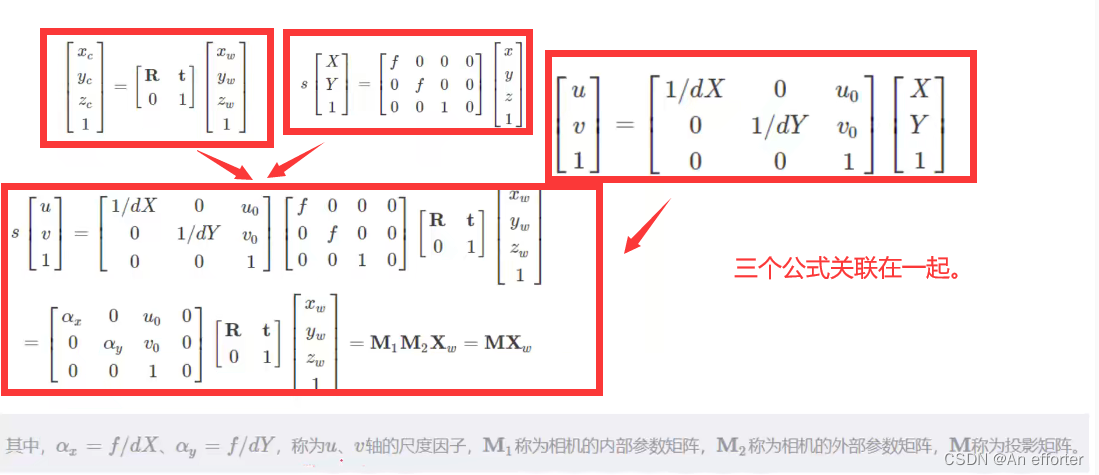
三、图像坐标系转化为像素坐标系这里不是难点,这里就是二维到二维的转换。

比如说, 求T点,是不是对应的X轴的关系为U = X/dx + Uo,对应的Y轴的关系同理。所以得出上图的那个矩阵。

采用的是针孔成像原理,这里还有一个是透视投影的概念,参考一下说明:
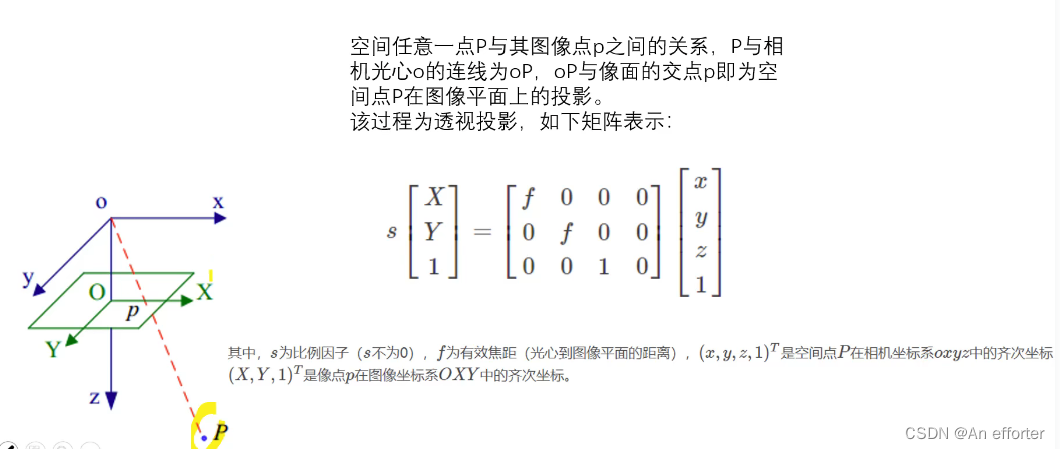
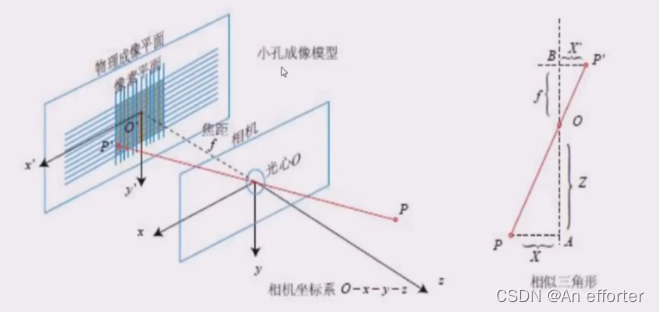
为了看的更加仔细,添加了下面的图,但是一定看好,画的成像平面和相机的光心上下位置是不一样的。上面的图光心o在上方,成像在下方,下面的图光心在前,成像在后方,正好能画出相似三角形。上边左边的图换成下边的图。运用相似三角形的原理,得出上图右边的矩阵。
至于为什么要建立这个关系?因为要建立三维转二维的关系,那么Z轴将失去联系,其它的坐标轴都满足s * X = f * x的关系,在对应下面右边的相似三角形,是不是就清楚了。
通过以上说明,可以在世界坐标系与像素坐标系之间得出关系了。
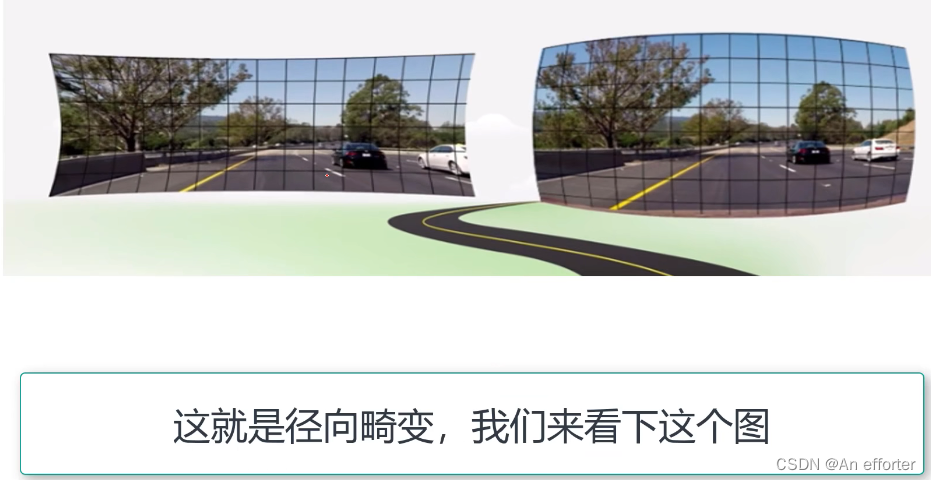
畸变―般可以分为:径向畸变、切向畸变
径向畸变来自于透镜形状
切向畸变来自于整个摄像机的组装过程畸变还有其他类型的畸变,但是没有径向畸变、切向畸变显著
结合下图进行参考:

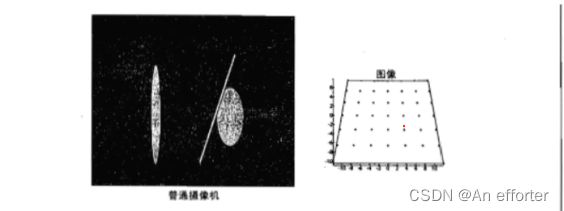
- 实际摄像机的透镜总是在成像仪的边缘产生显著的畸变,这种现象来源于“筒形"或“鱼眼”的影响。
- 光线在远离透镜中心的地方比靠近中心的地方更加弯曲。对于常用的普通透镜来说,这种现象更加严重。
对于径向畸变,成像仪中心(光学中心)的畸变为0,随着向边缘移动,畸变越来越严重。
径向畸变有三种 : 桶形畸变 枕形畸变 胡子畸变

- 切向畸变是由于透镜制造上的缺陷使得透镜本身与图像平面不平行而产生的。
- 切向畸变可分为:薄透镜畸变、离心畸变
图像像梯形一样发生了扭曲:当透镜不完全平行于图像平面时候产生切向畸变。

在VMware16.2.4安装Ubuntu一、安装VMware1.打开VMwareWorkstationPro官网,点击即可进入。2.进入后向下滑动找到Workstation16ProforWindows,点击立即下载。3.下载完成,文件大小615MB,如下图:4.鼠标右击,以管理员身份运行。5.点击下一步6.勾选条款,点击下一步7.先勾选,再点击下一步8.去掉勾选,点击下一步9.点击下一步10.点击安装11.点击许可证12.在百度上搜索VM16许可证,复制填入,然后点击输入即可,亲测有效。13.点击完成14.重启系统,点击是15.双击VMwareWorkstationPro图标,进入虚拟机主
📢博客主页:https://blog.csdn.net/weixin_43197380📢欢迎点赞👍收藏⭐留言📝如有错误敬请指正!📢本文由Loewen丶原创,首发于CSDN,转载注明出处🙉📢现在的付出,都会是一种沉淀,只为让你成为更好的人✨文章预览:一.分辨率(Resolution)1、工业相机的分辨率是如何定义的?2、工业相机的分辨率是如何选择的?二.精度(Accuracy)1、像素精度(PixelAccuracy)2、定位精度和重复定位精度(RepeatPrecision)三.公差(Tolerance)四.课后作业(Post-ClassExercises)视觉行业的初学者,甚至是做了1~2年
Rails相对较新。我正在尝试调用一个API,它应该向我返回一个唯一的URL。我的应用程序中捆绑了HTTParty。我已经创建了一个UniqueNumberController,并且我已经阅读了几个HTTParty指南,直到我想要什么,但也许我只是有点迷路,真的不知道该怎么做。基本上,我需要做的就是调用API,获取它返回的URL,然后将该URL插入到用户的数据库中。谁能给我指出正确的方向或与我分享一些代码? 最佳答案 假设API为JSON格式并返回如下数据:{"url":"http://example.com/unique-url"
我是Cucumber测试的新手。我创建了两个特征文件:events.featurepartner.feature并将我的步骤定义放在step_definitions文件夹中:./step_definitions/events.rbpartner.rbCucumber似乎在所有.rb文件中查找步骤信息。有没有办法限制该功能查看特定的步骤定义文件?我之所以要这样做,是因为即使我使用了--guess标志,我也会遇到不明确的匹配错误。我之所以要这样做,有以下几个原因。我正在测试CMS,并希望在不同的功能中测试每种不同的内容类型(事件和合作伙伴)。事件.特征Feature:AddpartnerA
我想在ruby中生成一个64位整数。我知道在Java中你有很多渴望,但我不确定你会如何在Ruby中做到这一点。另外,64位数字中有多少个字符?这是我正在谈论的示例......123456789999。@num=Random.rand(9000)+Random.rand(9000)+Random.rand(9000)但我认为这是非常低效的,必须有一种更简单、更简洁的方法来做到这一点。谢谢! 最佳答案 rand可以将范围作为参数:pa=rand(2**32..2**64-1)#=>11093913376345012184putsa.
我在下面有一个步骤定义,它执行我想要它执行的操作,即它根据“PAGES”哈希的“page”元素检查页面的url。Then(/^Ishould(still)?beatthe"(.*)"page$/)do|still,page|BROWSER.url.should==PAGES[page]end步骤定义用于两者我应该在...页面我应该还在...页面但是,我不需要将“still”传递到block中。我只需要它是可选的以匹配步骤但不传递到block中。我该怎么做?谢谢。 最佳答案 您想将“静止”组标记为非捕获。这是通过使用?:启动组来完成的
我刚刚在我的Ubuntu9.10服务器上安装了TeamBox。我使用提供的服务器脚本在端口3000上启动并运行它。它的运行速度非常慢,从另一台计算机连接时每个HTTP请求最多需要30秒。我使用链接从shell加载TeamBox,一点也不花时间。然后我设置了一个SSH隧道,它再次运行得非常快。我通过此服务器上的apache以及SAMBA等运行了大约30个虚拟主机,没有任何问题。我该如何解决这个问题? 最佳答案 我的redmine(ruby,webrick)太慢了。现在我解决了这个问题:apt-getinstallmongrelruby
1.问题描述使用Python的turtle(海龟绘图)模块提供的函数绘制直线。2.问题分析一幅复杂的图形通常都可以由点、直线、三角形、矩形、平行四边形、圆、椭圆和圆弧等基本图形组成。其中的三角形、矩形、平行四边形又可以由直线组成,而直线又是由两个点确定的。我们使用Python的turtle模块所提供的函数来绘制直线。在使用之前我们先介绍一下turtle模块的相关知识点。turtle模块提供面向对象和面向过程两种形式的海龟绘图基本组件。面向对象的接口类如下:1)TurtleScreen类:定义图形窗口作为绘图海龟的运动场。它的构造器需要一个tkinter.Canvas或ScrolledCanva
目录H2数据库入门以及实际开发时的使用1.H2数据库的初识1.1H2数据库介绍1.2为什么要使用嵌入式数据库?1.3嵌入式数据库对比1.3.1性能对比1.4技术选型思考2.H2数据库实战2.1H2数据库下载搭建以及部署2.1.1H2数据库的下载2.1.2数据库启动2.1.2.1windows系统可以在bin目录下执行h2.bat2.1.2.2同理可以通过cmd直接使用命令进行启动:2.1.2.3启动后控制台页面:2.1.3spring整合H2数据库2.1.3.1引入依赖文件2.1.4数据库通过file模式实际保存数据的位置2.2H2数据库操作2.2.1Mysql兼容模式2.2.2Mysql模式
我们想测试cucumber的步骤定义。我们希望能够检查的一件事是我们期望失败的测试实际上失败了。为此,我们想编写我们知道会失败的场景并将它们添加到我们的测试套件中,但标记或以其他方式表示它们以便当且仅当它们失败时它们“通过”。如何解决这个问题? 最佳答案 您应该测试负面状态。失败的步骤只是通过步骤的倒数。所以做这样的事情:Then/ishouldnotbetrue/dosome_value.should_notbe_trueend这就是我进行失败测试的方式。您还可以捕获异常等,并验证block是否确实抛出该异常lambdadosom