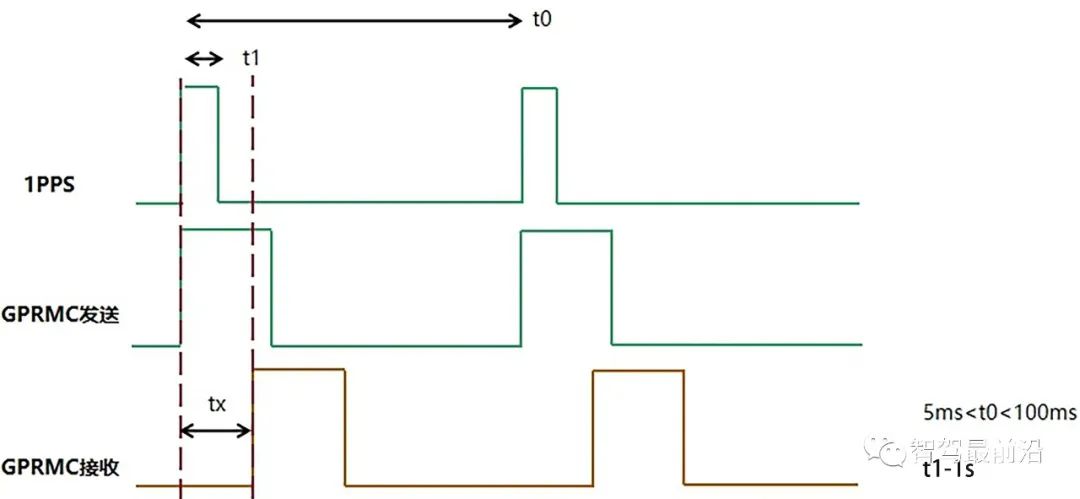
 PPS秒脉冲为物理电平输出,接收及处理PPS信号的时间在ns级别,依旧可以忽略。但GPRMC数据一般通过波特率9600的串口发送,发送、接收、处理时间tx在ms级别,是时间同步的关键。以下是使用PPS+GPRMC进行时间同步的原理。(1)设备收到PPS秒脉冲信号后,将内部以晶振为时钟源的系统时间里的毫秒及以下时间清零,并由此开始计算毫秒时间。(2)当收到GPRMC数据后,提取报文里的时、分、秒、年、月、日UTC时间。(3)将收到秒脉冲到解析出GPRMC中UTC时间所用的时间tx,与UTC整秒时间相加,同步给系统时间,至此已完成一次时间同步。下一秒再进行相同的过程,每秒准确校准一次。聪明的人可能已经恍然大悟,激光雷达需要进行时间同步,就做两根线接上这两个物理接口就妥了,这种方式是可以的,也是很多厂商在用的方案,但是PPS+GPRMC存在如下问题。(1)PPS是一个低功率的脉冲电平信号,驱动电流少的只有0.5mA,多的也就20mA,带几个同步节点(激光雷达和其他需要时间同步的节点),十几个就很困难了。(2)PPS是无屏蔽的单线脉冲信号,十几根PPS线穿梭在车内,极易受到车内恶劣电磁环境的干扰,届时根本无法区分出是干扰脉冲还是同步脉冲。(3)GPRMC通过RS232串口发送同步报文,RS232是一种1对1的全双工通信形式,也可以通过主从形式实现1对几数据传输。但对十几,实属罕见,只能通过试验验证到底可不可行。但至少线束工程师是打死不愿答应的。(4)当时钟源丢失的时候,所有需要时间同步的设备都一下子没有了主心骨,每个小弟都可以自立门户,没有二当家的及时站出来,主持大局。这对功能安全要求极高的自动驾驶系统来说,根本无法接受。
PPS秒脉冲为物理电平输出,接收及处理PPS信号的时间在ns级别,依旧可以忽略。但GPRMC数据一般通过波特率9600的串口发送,发送、接收、处理时间tx在ms级别,是时间同步的关键。以下是使用PPS+GPRMC进行时间同步的原理。(1)设备收到PPS秒脉冲信号后,将内部以晶振为时钟源的系统时间里的毫秒及以下时间清零,并由此开始计算毫秒时间。(2)当收到GPRMC数据后,提取报文里的时、分、秒、年、月、日UTC时间。(3)将收到秒脉冲到解析出GPRMC中UTC时间所用的时间tx,与UTC整秒时间相加,同步给系统时间,至此已完成一次时间同步。下一秒再进行相同的过程,每秒准确校准一次。聪明的人可能已经恍然大悟,激光雷达需要进行时间同步,就做两根线接上这两个物理接口就妥了,这种方式是可以的,也是很多厂商在用的方案,但是PPS+GPRMC存在如下问题。(1)PPS是一个低功率的脉冲电平信号,驱动电流少的只有0.5mA,多的也就20mA,带几个同步节点(激光雷达和其他需要时间同步的节点),十几个就很困难了。(2)PPS是无屏蔽的单线脉冲信号,十几根PPS线穿梭在车内,极易受到车内恶劣电磁环境的干扰,届时根本无法区分出是干扰脉冲还是同步脉冲。(3)GPRMC通过RS232串口发送同步报文,RS232是一种1对1的全双工通信形式,也可以通过主从形式实现1对几数据传输。但对十几,实属罕见,只能通过试验验证到底可不可行。但至少线束工程师是打死不愿答应的。(4)当时钟源丢失的时候,所有需要时间同步的设备都一下子没有了主心骨,每个小弟都可以自立门户,没有二当家的及时站出来,主持大局。这对功能安全要求极高的自动驾驶系统来说,根本无法接受。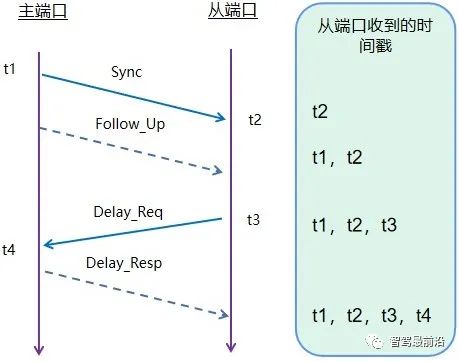 (1)PTP主端口向从端口发送Sync报文,同步记录下Sync发送的时间t1。从端口收到Sync报文后,记录下收到的时间t2。(2)紧接着主端口将t1时间放到Follow_Up报文发送给从端口,从端口收到此报文后就可以解析出t1,并由此得到第一个方程式:t1+网络延时+时钟偏差=t2。(3)从端口向主端口发送Delay_Req报文,同步记录下Delay_Req发送的时间t3。主端口收到报文后,记录下收到的时间t4。(4)紧接着主端口将t4时间放到Delay_Resp报文发送给从端口,从端口收到此报文后就可以解析出t4,并由此得到第一个方程式:t3+网络延时-时钟偏差=t4。两个未知数,两个方程组,应用初中数学知识可以解出:网络延时=[(t2-t1)+(t4-t1)]/2,时钟偏差=[(t2-t1)-(t4-t3)]/2。
(1)PTP主端口向从端口发送Sync报文,同步记录下Sync发送的时间t1。从端口收到Sync报文后,记录下收到的时间t2。(2)紧接着主端口将t1时间放到Follow_Up报文发送给从端口,从端口收到此报文后就可以解析出t1,并由此得到第一个方程式:t1+网络延时+时钟偏差=t2。(3)从端口向主端口发送Delay_Req报文,同步记录下Delay_Req发送的时间t3。主端口收到报文后,记录下收到的时间t4。(4)紧接着主端口将t4时间放到Delay_Resp报文发送给从端口,从端口收到此报文后就可以解析出t4,并由此得到第一个方程式:t3+网络延时-时钟偏差=t4。两个未知数,两个方程组,应用初中数学知识可以解出:网络延时=[(t2-t1)+(t4-t1)]/2,时钟偏差=[(t2-t1)-(t4-t3)]/2。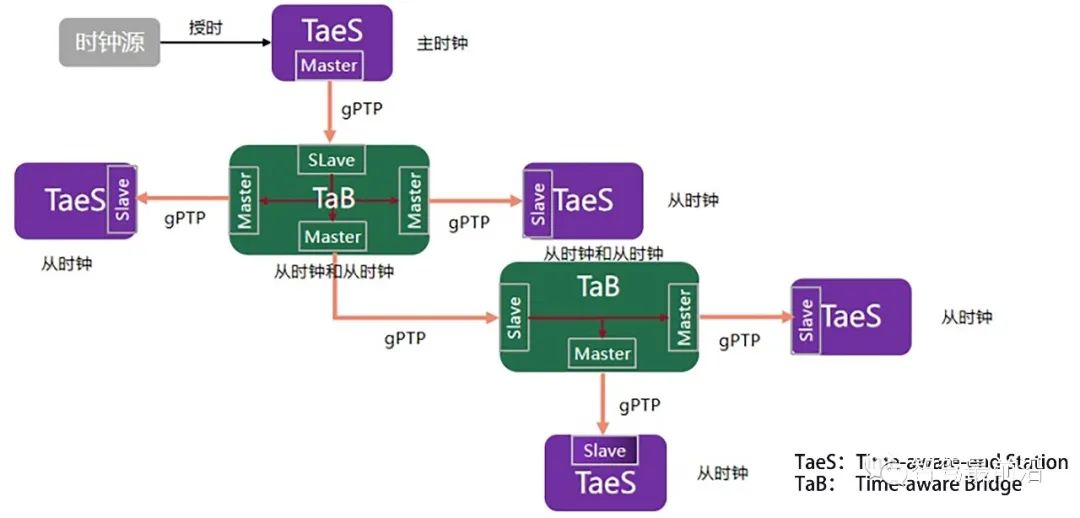 gPTP中规定的主时钟动态分配机制为BMCA(Best Master Clock Algorithm,最佳主时钟选择算法)。系统上电唤醒之后,系统所有设备都可以通过发送一条报文来参与主时钟竞选,报文中含有各自设备的时钟信息。每一个参选设备都会比较自己的时钟信息和其它设备的时钟信息,并判断是否具有优势,如果不具有,则退出竞选,直到综合能力最强的武林盟主诞生。
gPTP中规定的主时钟动态分配机制为BMCA(Best Master Clock Algorithm,最佳主时钟选择算法)。系统上电唤醒之后,系统所有设备都可以通过发送一条报文来参与主时钟竞选,报文中含有各自设备的时钟信息。每一个参选设备都会比较自己的时钟信息和其它设备的时钟信息,并判断是否具有优势,如果不具有,则退出竞选,直到综合能力最强的武林盟主诞生。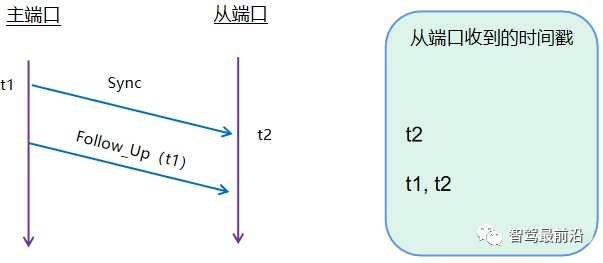 如果没有网络传输延迟或延迟、可以忽略,则从端口将本地时钟值加上时钟偏差(t1-t2的值)就完成时间同步,也就没有后面的碎碎念了。但是对于μs级时间同步精度的gPTP来说,传输延迟显然无法视若不见。
如果没有网络传输延迟或延迟、可以忽略,则从端口将本地时钟值加上时钟偏差(t1-t2的值)就完成时间同步,也就没有后面的碎碎念了。但是对于μs级时间同步精度的gPTP来说,传输延迟显然无法视若不见。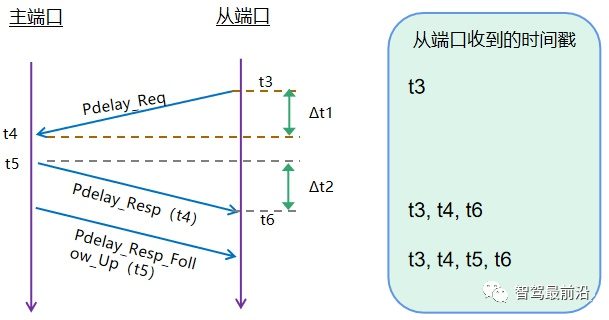 从端口首先发送Pdelay_Req报文,标志传输延迟测量的开始,在报文离开从端口MAC层时,触发从端口记录此时的时间戳t3。主端口MAC层收到Pdelay_Req报文后会记录此时的时间戳t4,随后,主端口通过Pdelay_Resp报文将值t4发送给从端口,同时在Pdelay_Resp报文离开主端口的MAC层时,触发主端口记录此时的时间戳t5,从端口MAC层收到Pdelay_Resp报文后记录此时的时间戳t6。随后,相同的套路,主端口通过Pdelay_Resp_Follow_Up报文将值t5发送给从端口。至此,一次传输延迟测量过程已经结束。在假设路径传输延迟是对称的前提下,可由如下公式计算相邻设备间的传输延迟。
从端口首先发送Pdelay_Req报文,标志传输延迟测量的开始,在报文离开从端口MAC层时,触发从端口记录此时的时间戳t3。主端口MAC层收到Pdelay_Req报文后会记录此时的时间戳t4,随后,主端口通过Pdelay_Resp报文将值t4发送给从端口,同时在Pdelay_Resp报文离开主端口的MAC层时,触发主端口记录此时的时间戳t5,从端口MAC层收到Pdelay_Resp报文后记录此时的时间戳t6。随后,相同的套路,主端口通过Pdelay_Resp_Follow_Up报文将值t5发送给从端口。至此,一次传输延迟测量过程已经结束。在假设路径传输延迟是对称的前提下,可由如下公式计算相邻设备间的传输延迟。
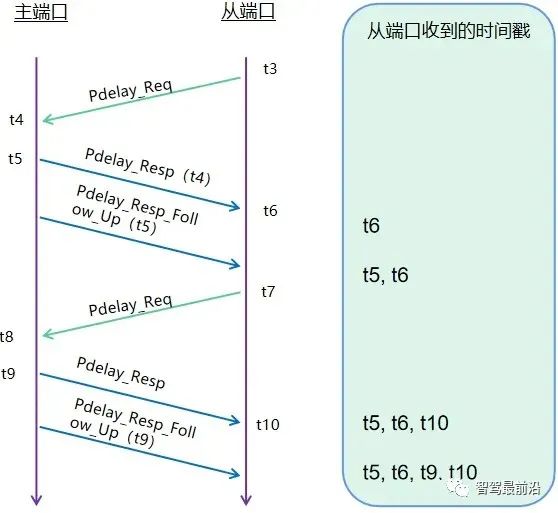 频率同步复用传输延迟测量过程的Pdelay_Resp和Pdelay_Resp_Follow_UP报文。通过采用两组答复,最终可以获得t5,t6,t9,t10的值,由下面公式可得主从端口的频率比。
频率同步复用传输延迟测量过程的Pdelay_Resp和Pdelay_Resp_Follow_UP报文。通过采用两组答复,最终可以获得t5,t6,t9,t10的值,由下面公式可得主从端口的频率比。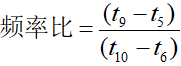 主从端口频率同步的情况下,频率比等于1。如果大于1,说明主端口走得快,如果小于1,说明主端口走的慢。从端口根据频率比的值,调整自己的时基,从而获得正确的时间戳。
主从端口频率同步的情况下,频率比等于1。如果大于1,说明主端口走得快,如果小于1,说明主端口走的慢。从端口根据频率比的值,调整自己的时基,从而获得正确的时间戳。 我正在学习如何使用Nokogiri,根据这段代码我遇到了一些问题:require'rubygems'require'mechanize'post_agent=WWW::Mechanize.newpost_page=post_agent.get('http://www.vbulletin.org/forum/showthread.php?t=230708')puts"\nabsolutepathwithtbodygivesnil"putspost_page.parser.xpath('/html/body/div/div/div/div/div/table/tbody/tr/td/div
总的来说,我对ruby还比较陌生,我正在为我正在创建的对象编写一些rspec测试用例。许多测试用例都非常基础,我只是想确保正确填充和返回值。我想知道是否有办法使用循环结构来执行此操作。不必为我要测试的每个方法都设置一个assertEquals。例如:describeitem,"TestingtheItem"doit"willhaveanullvaluetostart"doitem=Item.new#HereIcoulddotheitem.name.shouldbe_nil#thenIcoulddoitem.category.shouldbe_nilendend但我想要一些方法来使用
很好奇,就使用rubyonrails自动化单元测试而言,你们正在做什么?您是否创建了一个脚本来在cron中运行rake作业并将结果邮寄给您?git中的预提交Hook?只是手动调用?我完全理解测试,但想知道在错误发生之前捕获错误的最佳实践是什么。让我们理所当然地认为测试本身是完美无缺的,并且可以正常工作。下一步是什么以确保他们在正确的时间将可能有害的结果传达给您? 最佳答案 不确定您到底想听什么,但是有几个级别的自动代码库控制:在处理某项功能时,您可以使用类似autotest的内容获得关于哪些有效,哪些无效的即时反馈。要确保您的提
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
给定这段代码defcreate@upgrades=User.update_all(["role=?","upgraded"],:id=>params[:upgrade])redirect_toadmin_upgrades_path,:notice=>"Successfullyupgradeduser."end我如何在该操作中实际验证它们是否已保存或未重定向到适当的页面和消息? 最佳答案 在Rails3中,update_all不返回任何有意义的信息,除了已更新的记录数(这可能取决于您的DBMS是否返回该信息)。http://ar.ru
我在我的项目目录中完成了compasscreate.和compassinitrails。几个问题:我已将我的.sass文件放在public/stylesheets中。这是放置它们的正确位置吗?当我运行compasswatch时,它不会自动编译这些.sass文件。我必须手动指定文件:compasswatchpublic/stylesheets/myfile.sass等。如何让它自动运行?文件ie.css、print.css和screen.css已放在stylesheets/compiled。如何在编译后不让它们重新出现的情况下删除它们?我自己编译的.sass文件编译成compiled/t
我正在寻找执行以下操作的正确语法(在Perl、Shell或Ruby中):#variabletoaccessthedatalinesappendedasafileEND_OF_SCRIPT_MARKERrawdatastartshereanditcontinues. 最佳答案 Perl用__DATA__做这个:#!/usr/bin/perlusestrict;usewarnings;while(){print;}__DATA__Texttoprintgoeshere 关于ruby-如何将脚
Rackup通过Rack的默认处理程序成功运行任何Rack应用程序。例如:classRackAppdefcall(environment)['200',{'Content-Type'=>'text/html'},["Helloworld"]]endendrunRackApp.new但是当最后一行更改为使用Rack的内置CGI处理程序时,rackup给出“NoMethodErrorat/undefinedmethod`call'fornil:NilClass”:Rack::Handler::CGI.runRackApp.newRack的其他内置处理程序也提出了同样的反对意见。例如Rack
在选择我想要运行操作的频率时,唯一的选项是“每天”、“每小时”和“每10分钟”。谢谢!我想为我的Rails3.1应用程序运行调度程序。 最佳答案 这不是一个优雅的解决方案,但您可以安排它每天运行,并在实际开始工作之前检查日期是否为当月的第一天。 关于ruby-如何每月在Heroku运行一次Scheduler插件?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/8692687/
我有一个对象has_many应呈现为xml的子对象。这不是问题。我的问题是我创建了一个Hash包含此数据,就像解析器需要它一样。但是rails自动将整个文件包含在.........我需要摆脱type="array"和我该如何处理?我没有在文档中找到任何内容。 最佳答案 我遇到了同样的问题;这是我的XML:我在用这个:entries.to_xml将散列数据转换为XML,但这会将条目的数据包装到中所以我修改了:entries.to_xml(root:"Contacts")但这仍然将转换后的XML包装在“联系人”中,将我的XML代码修改为