提示:前面写了A*、Dijkstra算法
文章目录
RRT和RRT*的区别:
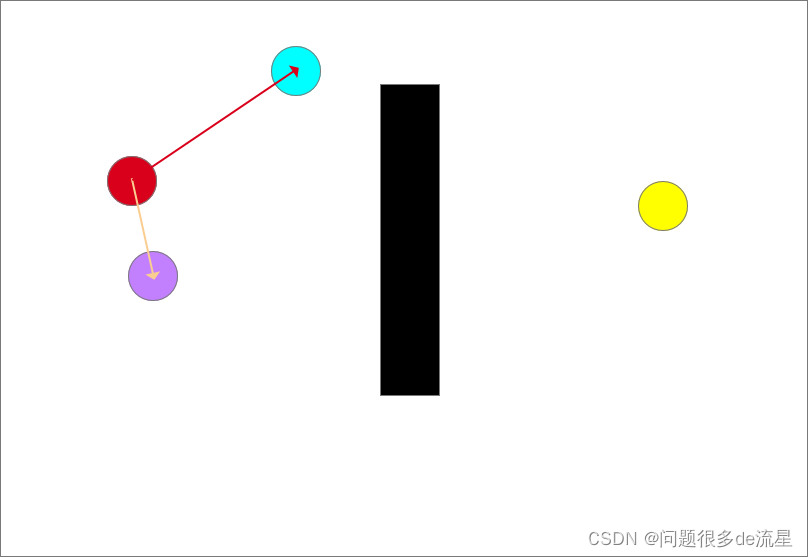
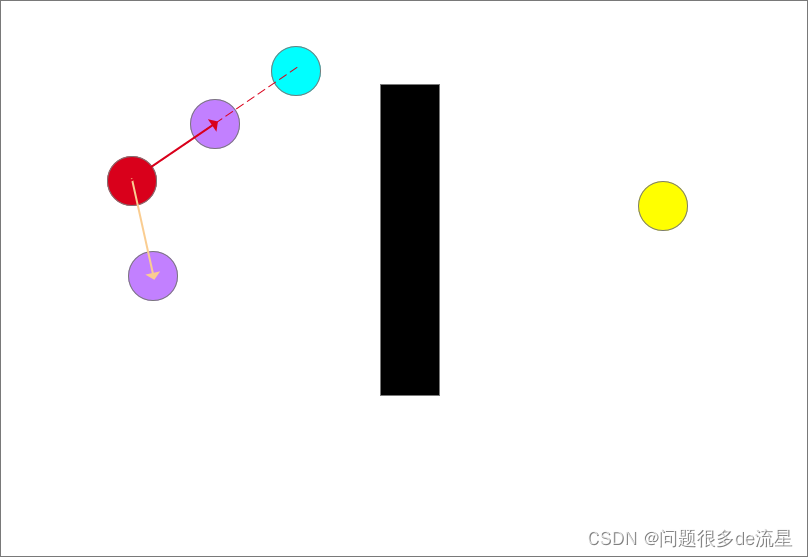
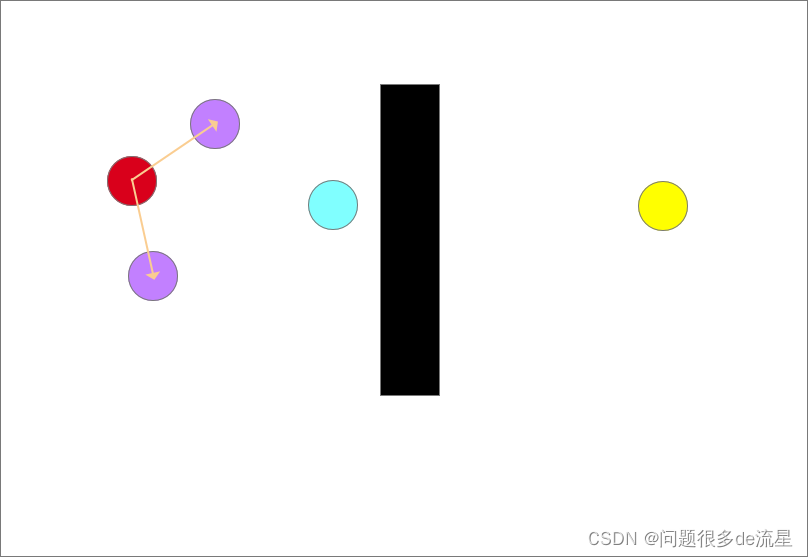
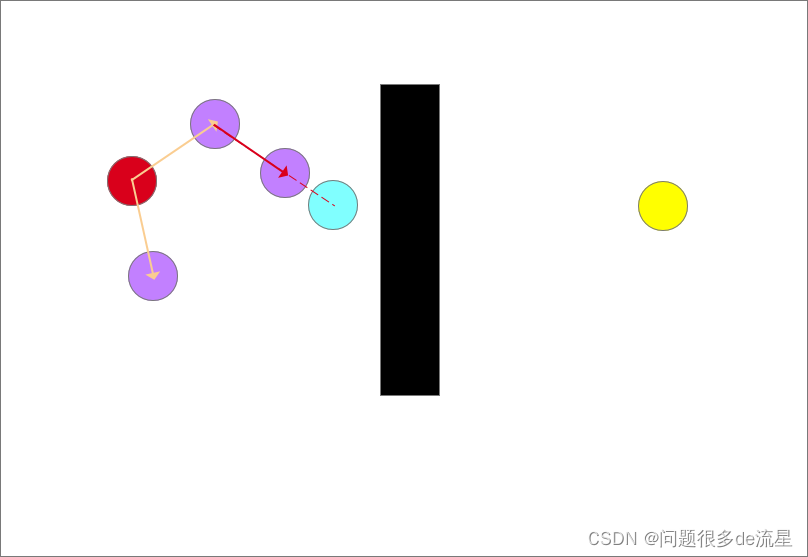
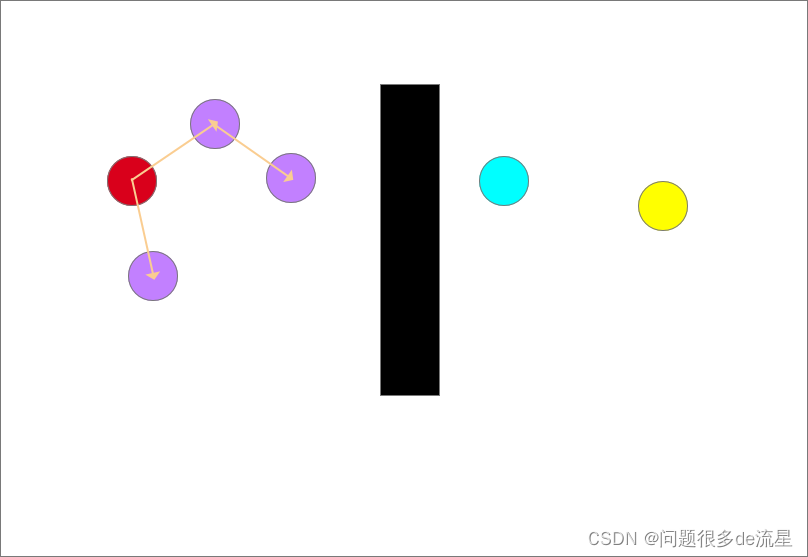
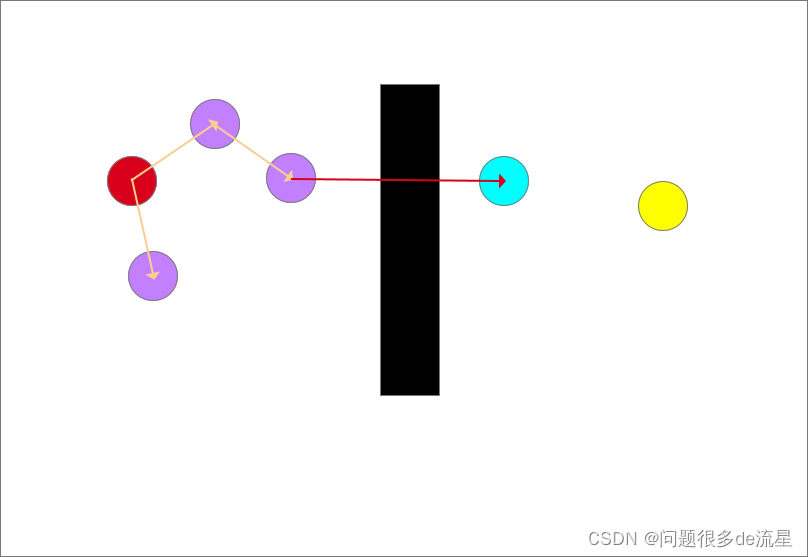
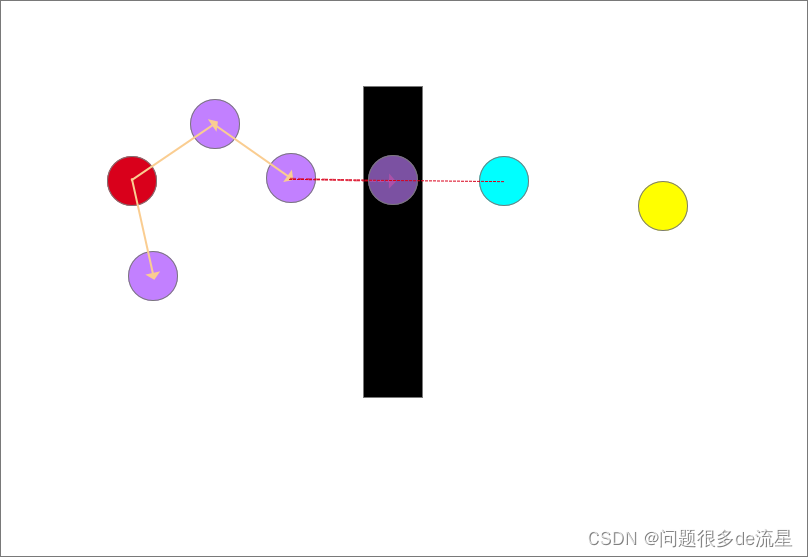
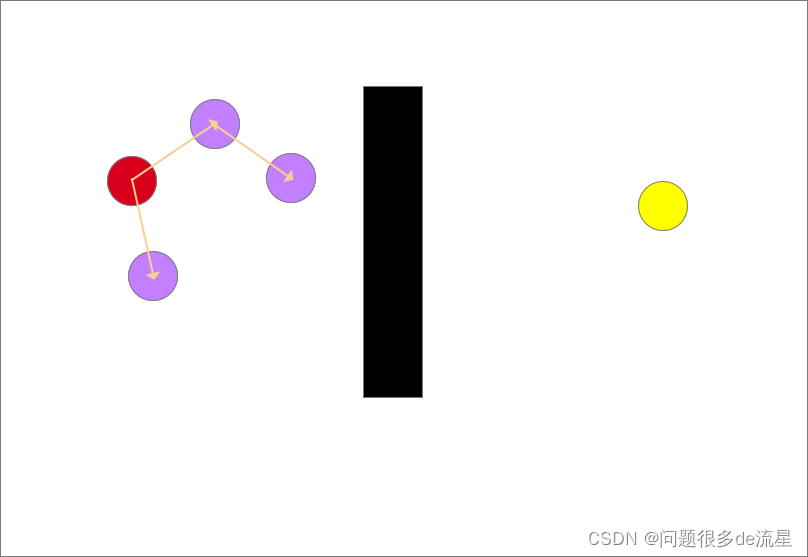
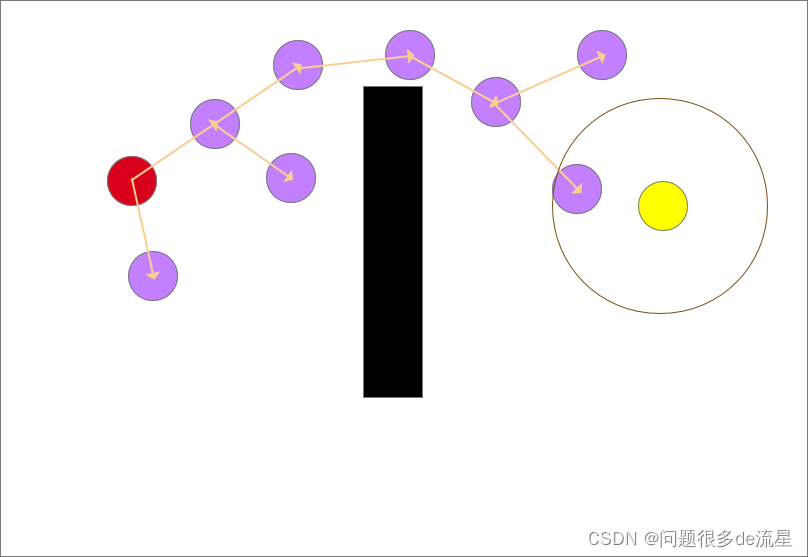
RRT的中文名为快速随机探索树,它的原理很简单,实际上就是维护一棵路径树:从起点开始,在空间中随机采样,并找到路径树上与采样点最接近且能与它无障碍地连接的点,连接这个点与采样点,将采样点加入路径树,直至终点附近区域被探索到。这种方式无法保证得到的路径是最优的。
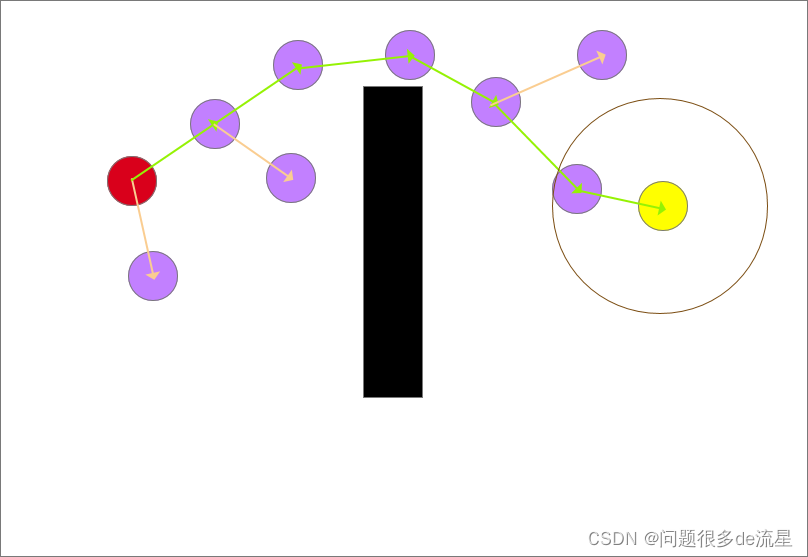
RRT* 在RRT基础上做了改进,主要是进行了重新选择父节点和重布线的操作。试想在RRT中,我们的采样点最终与整棵树上和它最近的点连了起来,但这未必是最好的选择,我们的最终目的是让这个点与起点的距离尽可能近。RRT* 便对此做了改进,它在采样点加入路径树以后,以其为圆心画了一个小圈,考虑是否有更好的父节点,连到那些节点上能使起点到该点的距离更短(尽管那些节点并不是离采样点最近的点)。如果选择了更加合适的父节点,那么就把它们连接起来,并去除原来的连线(重布线)。
我的原理启蒙:RRT算法原理图解
根据这篇文章,班门弄斧自己推导一遍这个过程,加强理解:
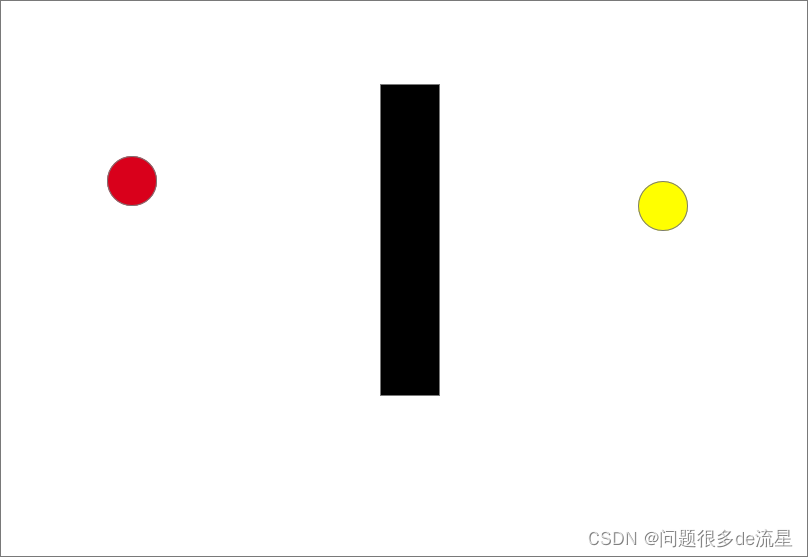
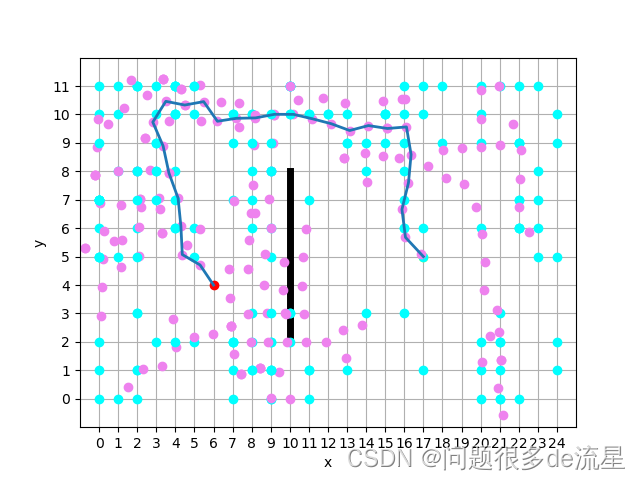
如图所示,红色的圆是起点,黄色的圆是终点,黑色代表障碍物
RRT的原理如下:

from math import sqrt
import numpy as np
import random
import itertools
import matplotlib.pyplot as plt
import warnings
warnings.filterwarnings('ignore')
# 初始化整个空间,定义初始点、终点、采样点数、点与点之间的步长t等信息
x_width = 25 # 空间的长度
y_width = 12 # 空间的宽度
error_list = [[0 for i in range(0, x_width)] for j in range(0, y_width)]
error_list[2][10] = 1
error_list[3][10] = 1
error_list[4][10] = 1
error_list[5][10] = 1
error_list[6][10] = 1
error_list[7][10] = 1
error_list[8][10] = 1
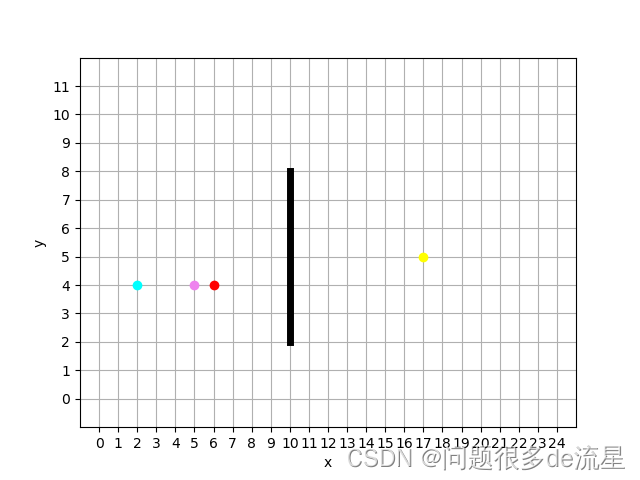
x0 = 6 # 定义初始点的x坐标
y0 = 4 # 定义初始点的y坐标
xn = 17 # 定义终点的x坐标
yn = 5 # 定义终点的y坐标
t = 1 # 点与点之间的步长
error_list[y0][x0] = 4
error_list[yn][xn] = 3
error_list = np.array(error_list)
# print(error_list)
plt.figure()
plt.xlim((-1, x_width))
plt.ylim((-1, y_width))
plt.xlabel('x')
plt.ylabel('y')
plt.xticks(np.arange(x_width))
plt.yticks(np.arange(y_width))
plt.grid()
tree_list = []
tree_list.append([x0, y0, x0, y0]) # 把起点作为树的点放入列表,避免随机点与起点重合
plt.plot(x0, y0, 'ro')
plt.plot(xn, yn, marker='o', color='yellow')
plt.plot([10, 10, 10, 10, 10, 10, 10], [2, 3, 4, 5, 6, 7, 8], 'k-', linewidth='5')
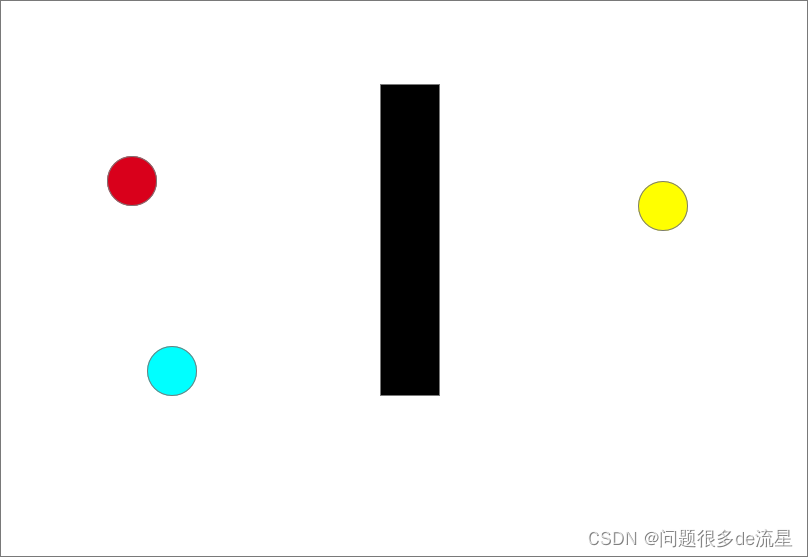
# 在空间中随机产生一个点xrand ->这个点不能是起点
def product_rand(tree_list):
x_width = 25 # 空间的长度
y_width = 12 # 空间的宽度
random_point = list(itertools.product(range(0, x_width), range(0, y_width)))
xrand = random.sample(random_point, 1)
xrand = list(xrand[0]) # 将随机点转换成list形式
tree_list = np.array(tree_list)
tree = tree_list[:, 0:2]
while xrand in tree: # 如果随机点在树的点列表里,重新生成随机点
xrand = random.sample(random_point, 1)
xrand = list(xrand[0]) # 将随机点转换成list形式
return xrand
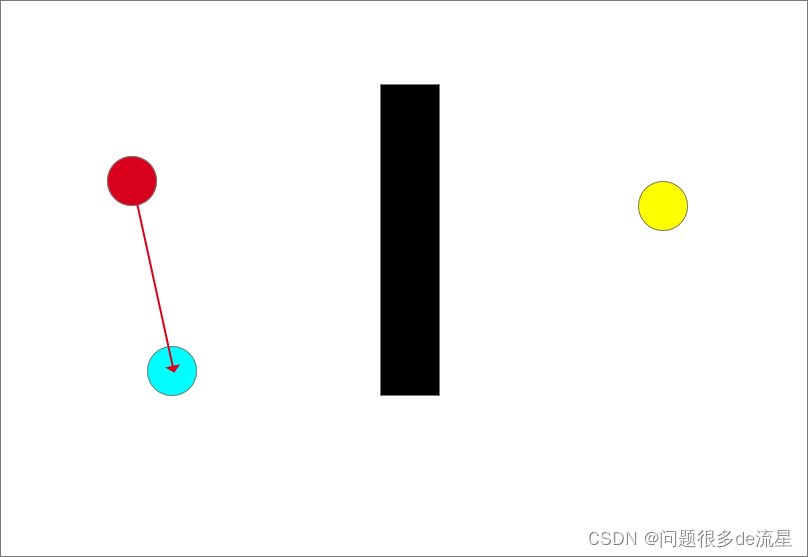
# 在已知树的点集合中找到距离这个随机点最近的点xnear
def product_near(tree_list, xrand):
m = np.inf
for i in range(0, len(tree_list)):
if abs(tree_list[i][0] - xrand[0]) + abs(tree_list[i][1] - xrand[1]) < m:
m = abs(tree_list[i][0] - xrand[0]) + abs(tree_list[i][1] - xrand[1])
xnear = [tree_list[i][0], tree_list[i][1]]
return xnear
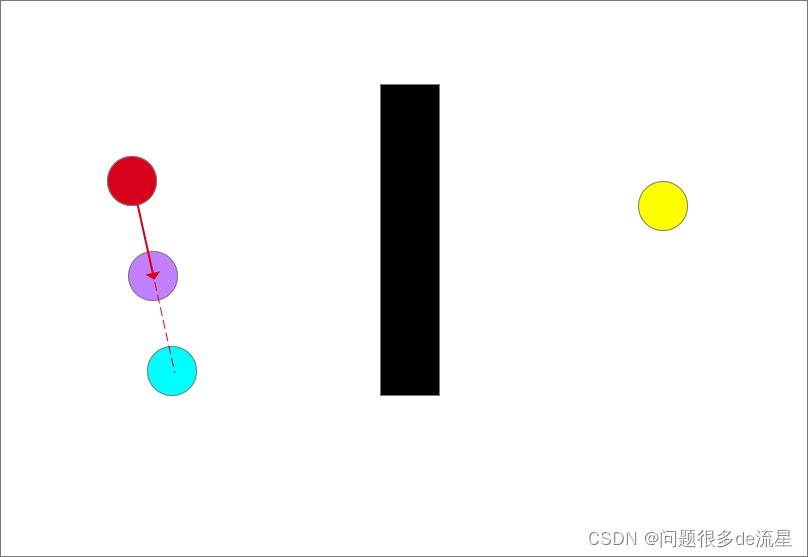
def decide_direction(xrand, xnear, t):
z_value = sqrt((xnear[0] - xrand[0]) ** 2 + (xnear[1] - xrand[1]) ** 2) # 斜边长度
cos_value = (xrand[0] - xnear[0]) / z_value
sin_value = (xrand[1] - xnear[1]) / z_value
xnew = [(xnear[0] + t * cos_value), (xnear[1] + t * sin_value)]
return xnew
xrand = product_rand(tree_list) # 随机生成点
xnear = product_near(tree_list, xrand)
xnew = decide_direction(xrand, xnear, t)
if xnear[0] != xrand[0]:
k = (xrand[1] - xnear[1]) / (xrand[0] - xnear[0])
y = k * (10 - xnear[0]) + xnear[1]
else:
y = 0
while 10 <= max(xnear[0], xnew[0]) and 10 <= min(xnear[0], xnew[0]) and 2 <= y <= 8:
xrand = product_rand(tree_list) # 随机生成点
xnear = product_near(tree_list, xrand)
xnew = decide_direction(xrand, xnear, t)
if xrand[0] - xnear[0] != 0:
k = (xrand[1] - xnear[1]) / (xrand[0] - xnear[0])
y = k * (10 - xnear[0]) + xnear[1]
tree_list.append([xnew[0], xnew[1], xnear[0], xnear[1]])
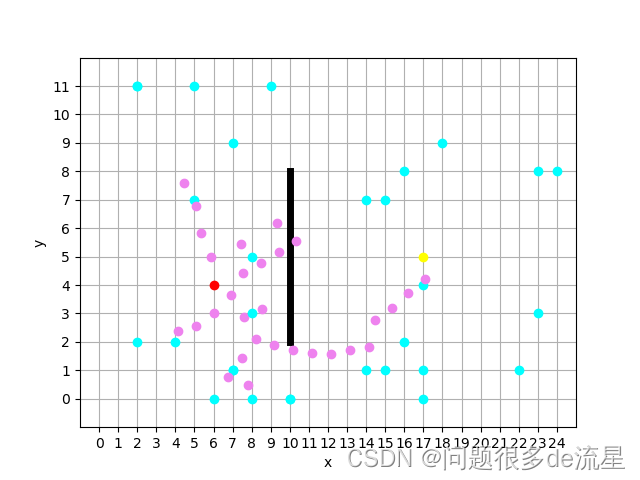
plt.plot(xrand[0], xrand[1], marker='o', color='cyan')
plt.plot(xnew[0], xnew[1], color='violet', marker='o')
# 循环
while ((xnew[0] - xn) ** 2 + (xnew[1] - yn) ** 2) > 1:
xrand = product_rand(tree_list) # 随机生成点
xnear = product_near(tree_list, xrand)
xnew = decide_direction(xrand, xnear, t)
if xnear[0] != xrand[0]:
k = (xrand[1] - xnear[1]) / (xrand[0] - xnear[0])
y = k * (10 - xnear[0]) + xnear[1]
else:
y = 0
while 10 <= max(xnear[0], xnew[0]) and 10 <= min(xnear[0], xnew[0]) and 2 <= y <= 8:
xrand = product_rand(tree_list) # 随机生成点
xnear = product_near(tree_list, xrand)
xnew = decide_direction(xrand, xnear, t)
if xrand[0] - xnear[0] != 0:
k = (xrand[1] - xnear[1]) / (xrand[0] - xnear[0])
y = k * (10 - xnear[0]) + xnear[1]
tree_list.append([xnew[0], xnew[1], xnear[0], xnear[1]])
plt.plot(xrand[0], xrand[1], marker='o', color='cyan')
plt.plot(xnew[0], xnew[1], color='violet', marker='o')
tree_list = np.array(tree_list)
routine_list = [[xn,yn]]
n = len(tree_list)-1
x = tree_list[n,0]
y = tree_list[n,1]
f_x = tree_list[n,2]
f_y = tree_list[n,3]
routine_list.append([x,y])
search_list=[]
while [x0,y0] not in routine_list:
search_list = tree_list[np.where((tree_list[:,0]==f_x) & (tree_list[:,1]==f_y))][0]
search_list = search_list.tolist()
routine_list.append([search_list[0],search_list[1]])
f_x = search_list[2]
f_y = search_list[3]
print(routine_list)
routine_list = np.array(routine_list)
plt.plot(routine_list[:,0], routine_list[:,1], '-', linewidth='2')
plt.show()
RRT算法只能找到一条可行路径,并不能保证找到一条最优路径,RRT* 算法在RRT算法的基础上增加了两步:rewrite和random relink。也就是重写和随机重连。
重写就是在新节点xnew加入到树种之后,重新为它选择父节点,好让它到起始点的路径长度(代价)更小。
随机重连就是在重写完成之后,对新节点xnew附近一定范围内的节点进行重连。重连就是,检查一下如果把xnew附近的这些节点的父节点设置为xnew,这些节点的代价会不会减小。如果能够减小,就把这些节点的父节点更改为xnew;否则,就不更改。RRT* 算法考虑每一个节点到出发点的距离,为此每一个节点会增加一个属性:distance_to_start,即到出发点的距离。相应地在每一个节点选择父节点地时候,新节点的距离等于父节点的距离加上父节点到子节点的直线距离。
在RRT的基础上增加两个功能:
①rewrite重写
遍历整个树,
获得到新节点xnew的距离小于一定阈值(比如1.5倍的步长,也就是1.5*t)的所有节点
将这些节点加入到一个名为candidate_parent_of_newpoint的列表中,
为了方便,这些节点的distance不再用来存储到出发点的距离,而是用来存储如果把该节点设置为xnew的父节点的话,xnew到出发点的距离。
找到candidate_parent_of_newpoint列表中具有最小distance的那个节点,返回他的索引index,将新节点newpoint的父节点设置为index。
②random relink
遍历整个列表,对每一个节点执行如下动作{
if(该节点到xnew的距离小于一定的阈值,比如1.6倍的步长,也就是1.6*t){
if(该节点现在的distance>把该节点的父节点更新为newpoint之后的distance){
把该节点的父节点设置为xnew,并更新该节点的distance值
更新以该节点为根节点的子树中的每个节点的distance。
}
}
rewrite(重写):
# rewrite重写
def rewrite(tree_list, t, xnew):
# 遍历整个树
candidate_parent_of_xnew = []
for i in range(0, len(tree_list)):
distance = sqrt((xnew[0] - tree_list[i][0]) ** 2 + (xnew[1] - tree_list[i][1]) ** 2)
# 获得新节点xnew的距离小于一定阈值(比如1.5倍步长,也就是1.5*t)所有节点
if distance < 1.5 * t and (xnew[0] != tree_list[i][0] or xnew[1] != tree_list[i][1]):
distance = tree_list[i][4] + distance
candidate_parent_of_xnew.append([tree_list[i][0], tree_list[i][1], distance])
candidate_parent_of_xnew = np.array(candidate_parent_of_xnew)
# 将这些节点加入到candidate_parent_of_xnew列表中
parent_point = candidate_parent_of_xnew[np.where(candidate_parent_of_xnew[:, 2] == candidate_parent_of_xnew[:, 2].min())]
tree_list.append([xnew[0], xnew[1], parent_point[0][0], parent_point[0][1], parent_point[0][2]])
# 找到candidate_parent_of_xnew列表中具有最小distance的那个节点,将新节点xnew的父节点设置为该节点
return tree_list
random relink:
# random relink
def random_relink(tree_list, t, xnew):
# 遍历整个列表,对每一个节点执行如下动作:
tree_list = np.array(tree_list)
for i in range(0, len(tree_list)):
parent_distance = sqrt((xnew[0] - tree_list[i, 0]) ** 2 + (xnew[1] - tree_list[i, 1]) ** 2)
if parent_distance < 1.6 * t:
child_distance = parent_distance + tree_list[
np.where((tree_list[:, 0] == xnew[0]) & (tree_list[:, 1] == xnew[1])), 4]
if tree_list[i][4] > child_distance:
tree_list[np.where((tree_list[:, 0] == xnew[0]) & (tree_list[:, 1] == xnew[1])), 2] = xnew[0]
tree_list[np.where((tree_list[:, 0] == xnew[0]) & (tree_list[:, 1] == xnew[1])), 3] = xnew[1]
tree_list[np.where((tree_list[:, 0] == xnew[0]) & (tree_list[:, 1] == xnew[1])), 4] = child_distance
for j in range(0, len(tree_list)):
if tree_list[j, 2] == tree_list[i, 0] and tree_list[j, 3] == tree_list[i, 1]:
d = sqrt((tree_list[i, 0] - tree_list[j, 0]) ** 2 + (tree_list[i, 1] - tree_list[j, 1]) ** 2)
tree_list[j, 4] = child_distance + d
return tree_list.tolist()
效果图:



from math import sqrt
import numpy as np
import random
import itertools
import matplotlib.pyplot as plt
import warnings
warnings.filterwarnings('ignore')
# 初始化整个空间,定义初始点、终点、采样点数、点与点之间的步长t等信息
x_width = 25 # 空间的长度
y_width = 12 # 空间的宽度
error_list = [[0 for i in range(0, x_width)] for j in range(0, y_width)]
error_list[2][10] = 1
error_list[3][10] = 1
error_list[4][10] = 1
error_list[5][10] = 1
error_list[6][10] = 1
error_list[7][10] = 1
error_list[8][10] = 1
x0 = 6 # 定义初始点的x坐标
y0 = 4 # 定义初始点的y坐标
xn = 17 # 定义终点的x坐标
yn = 5 # 定义终点的y坐标
t = 1 # 点与点之间的步长
error_list[y0][x0] = 4
error_list[yn][xn] = 3
error_list = np.array(error_list)
# print(error_list)
plt.figure()
plt.xlim((-1, x_width))
plt.ylim((-1, y_width))
plt.xlabel('x')
plt.ylabel('y')
plt.xticks(np.arange(x_width))
plt.yticks(np.arange(y_width))
plt.grid()
tree_list = []
tree_list.append([x0, y0, x0, y0]) # 把起点作为树的点放入列表,避免随机点与起点重合
plt.plot(x0, y0, 'ro')
plt.plot(xn, yn, marker='o', color='yellow')
plt.plot([10, 10, 10, 10, 10, 10, 10], [2, 3, 4, 5, 6, 7, 8], 'k-', linewidth='5')
# 在空间中随机产生一个点xrand ->这个点不能是起点
def product_rand(tree_list):
x_width = 25 # 空间的长度
y_width = 12 # 空间的宽度
random_point = list(itertools.product(range(0, x_width), range(0, y_width)))
xrand = random.sample(random_point, 1)
xrand = list(xrand[0]) # 将随机点转换成list形式
tree_list = np.array(tree_list)
tree = tree_list[:, 0:2]
while xrand in tree: # 如果随机点在树的点列表里,重新生成随机点
xrand = random.sample(random_point, 1)
xrand = list(xrand[0]) # 将随机点转换成list形式
return xrand
# 在已知树的点集合中找到距离这个随机点最近的点xnear
def product_near(tree_list, xrand):
m = np.inf
for i in range(0, len(tree_list)):
if abs(tree_list[i][0] - xrand[0]) + abs(tree_list[i][1] - xrand[1]) < m:
m = abs(tree_list[i][0] - xrand[0]) + abs(tree_list[i][1] - xrand[1])
xnear = [tree_list[i][0], tree_list[i][1]]
return xnear
# 确定方向:在xnear到xrand的直线方向上从xnear以步长t截取点xnew
# tree_list.append(xrand)
def decide_direction(xrand, xnear, t):
z_value = sqrt((xnear[0] - xrand[0]) ** 2 + (xnear[1] - xrand[1]) ** 2) # 斜边长度
cos_value = (xrand[0] - xnear[0]) / z_value
sin_value = (xrand[1] - xnear[1]) / z_value
xnew = [(xnear[0] + t * cos_value), (xnear[1] + t * sin_value)]
return xnew
# 判断从xnear到xnew之间是否存在障碍物,若存在则舍弃该点
xrand = product_rand(tree_list) # 随机生成点
xnear = product_near(tree_list, xrand)
xnew = decide_direction(xrand, xnear, t)
if xnear[0] != xrand[0]:
k = (xrand[1] - xnear[1]) / (xrand[0] - xnear[0])
y = k * (10 - xnear[0]) + xnear[1]
else:
y = 0
while 10 <= max(xnear[0], xnew[0]) and 10 <= min(xnear[0], xnew[0]) and 2 <= y <= 8:
xrand = product_rand(tree_list) # 随机生成点
xnear = product_near(tree_list, xrand)
xnew = decide_direction(xrand, xnear, t)
if xrand[0] - xnear[0] != 0:
k = (xrand[1] - xnear[1]) / (xrand[0] - xnear[0])
y = k * (10 - xnear[0]) + xnear[1]
tree_list.append([xnew[0], xnew[1], xnear[0], xnear[1]])
plt.plot(xrand[0], xrand[1], marker='o', color='cyan')
plt.plot(xnew[0], xnew[1], color='violet', marker='o')
# 循环
while ((xnew[0] - xn) ** 2 + (xnew[1] - yn) ** 2) > 1:
xrand = product_rand(tree_list) # 随机生成点
xnear = product_near(tree_list, xrand)
xnew = decide_direction(xrand, xnear, t)
if xnear[0] != xrand[0]:
k = (xrand[1] - xnear[1]) / (xrand[0] - xnear[0])
y = k * (10 - xnear[0]) + xnear[1]
else:
y = 0
while 10 <= max(xnear[0], xnew[0]) and 10 <= min(xnear[0], xnew[0]) and 2 <= y <= 8:
xrand = product_rand(tree_list) # 随机生成点
xnear = product_near(tree_list, xrand)
xnew = decide_direction(xrand, xnear, t)
if xrand[0] - xnear[0] != 0:
k = (xrand[1] - xnear[1]) / (xrand[0] - xnear[0])
y = k * (10 - xnear[0]) + xnear[1]
tree_list.append([xnew[0], xnew[1], xnear[0], xnear[1]])
plt.plot(xrand[0], xrand[1], marker='o', color='cyan')
plt.plot(xnew[0], xnew[1], color='violet', marker='o')
tree_list = np.array(tree_list)
routine_list = [[xn,yn]]
n = len(tree_list)-1
x = tree_list[n,0]
y = tree_list[n,1]
f_x = tree_list[n,2]
f_y = tree_list[n,3]
routine_list.append([x,y])
search_list=[]
while [x0,y0] not in routine_list:
search_list = tree_list[np.where((tree_list[:,0]==f_x) & (tree_list[:,1]==f_y))][0]
search_list = search_list.tolist()
routine_list.append([search_list[0],search_list[1]])
f_x = search_list[2]
f_y = search_list[3]
print(routine_list)
routine_list = np.array(routine_list)
plt.plot(routine_list[:,0], routine_list[:,1], '-', linewidth='2')
plt.show()
from math import sqrt
import numpy as np
import random
import itertools
import matplotlib.pyplot as plt
import warnings
warnings.filterwarnings('ignore')
# 初始化整个空间,定义初始点、终点、采样点数、点与点之间的步长t等信息
x_width = 25 # 空间的长度
y_width = 12 # 空间的宽度
error_list = [[0 for i in range(0, x_width)] for j in range(0, y_width)]
error_list[2][10] = 1
error_list[3][10] = 1
error_list[4][10] = 1
error_list[5][10] = 1
error_list[6][10] = 1
error_list[7][10] = 1
error_list[8][10] = 1
x0 = 6 # 定义初始点的x坐标
y0 = 4 # 定义初始点的y坐标
xn = 17 # 定义终点的x坐标
yn = 5 # 定义终点的y坐标
t = 1 # 点与点之间的步长
error_list[y0][x0] = 4
error_list[yn][xn] = 3
error_list = np.array(error_list)
# print(error_list)
plt.figure()
plt.xlim((-1, x_width))
plt.ylim((-1, y_width))
plt.xlabel('x')
plt.ylabel('y')
plt.xticks(np.arange(x_width))
plt.yticks(np.arange(y_width))
plt.grid()
tree_list = []
tree_list.append([x0, y0, x0, y0, 0]) # 把起点作为树的点放入列表,避免随机点与起点重合
plt.plot(x0, y0, 'ro')
plt.plot(xn, yn, marker='o', color='yellow')
plt.plot([10, 10, 10, 10, 10, 10, 10], [2, 3, 4, 5, 6, 7, 8], 'k-', linewidth='5')
# 在空间中随机产生一个点xrand ->这个点不能是起点
def product_rand(tree_list):
x_width = 25 # 空间的长度
y_width = 12 # 空间的宽度
random_point = list(itertools.product(range(0, x_width), range(0, y_width)))
xrand = random.sample(random_point, 1)
xrand = list(xrand[0]) # 将随机点转换成list形式
tree_list = np.array(tree_list)
tree = tree_list[:, 0:2]
while xrand in tree: # 如果随机点在树的点列表里,重新生成随机点
xrand = random.sample(random_point, 1)
xrand = list(xrand[0]) # 将随机点转换成list形式
return xrand
# 在已知树的点集合中找到距离这个随机点最近的点xnear
def product_near(tree_list, xrand):
m = np.inf
for i in range(0, len(tree_list)):
if abs(tree_list[i][0] - xrand[0]) + abs(tree_list[i][1] - xrand[1]) < m:
m = abs(tree_list[i][0] - xrand[0]) + abs(tree_list[i][1] - xrand[1])
xnear = [tree_list[i][0], tree_list[i][1]]
return xnear
# 确定方向:在xnear到xrand的直线方向上从xnear以步长t截取点xnew
# tree_list.append(xrand)
def decide_direction(xrand, xnear, t):
z_value = sqrt((xnear[0] - xrand[0]) ** 2 + (xnear[1] - xrand[1]) ** 2) # 斜边长度
cos_value = (xrand[0] - xnear[0]) / z_value
sin_value = (xrand[1] - xnear[1]) / z_value
xnew = [(xnear[0] + t * cos_value), (xnear[1] + t * sin_value)]
return xnew
# 判断从xnear到xnew之间是否存在障碍物,若存在则舍弃该点
xrand = product_rand(tree_list) # 随机生成点
xnear = product_near(tree_list, xrand)
xnew = decide_direction(xrand, xnear, t)
if xnear[0] != xrand[0]:
k = (xrand[1] - xnear[1]) / (xrand[0] - xnear[0])
y = k * (10 - xnear[0]) + xnear[1]
else:
y = 0
while 10 <= max(xnear[0], xnew[0]) and 10 <= min(xnear[0], xnew[0]) and 2 <= y <= 8:
xrand = product_rand(tree_list) # 随机生成点
xnear = product_near(tree_list, xrand)
xnew = decide_direction(xrand, xnear, t)
if xrand[0] - xnear[0] != 0:
k = (xrand[1] - xnear[1]) / (xrand[0] - xnear[0])
y = k * (10 - xnear[0]) + xnear[1]
else:
y = 0
tree_list.append([xnew[0], xnew[1], xnear[0], xnear[1], t])
plt.plot(xrand[0], xrand[1], marker='o', color='cyan')
plt.plot(xnew[0], xnew[1], color='violet', marker='o')
# rewrite重写
def rewrite(tree_list, t, xnew):
# 遍历整个树
candidate_parent_of_xnew = []
for i in range(0, len(tree_list)):
distance = sqrt((xnew[0] - tree_list[i][0]) ** 2 + (xnew[1] - tree_list[i][1]) ** 2)
# 获得新节点xnew的距离小于一定阈值(比如1.5倍步长,也就是1.5*t)所有节点
if distance < 1.5 * t and (xnew[0] != tree_list[i][0] or xnew[1] != tree_list[i][1]):
distance = tree_list[i][4] + distance
candidate_parent_of_xnew.append([tree_list[i][0], tree_list[i][1], distance])
candidate_parent_of_xnew = np.array(candidate_parent_of_xnew)
# 将这些节点加入到candidate_parent_of_xnew列表中
parent_point = candidate_parent_of_xnew[np.where(candidate_parent_of_xnew[:, 2] == candidate_parent_of_xnew[:, 2].min())]
tree_list.append([xnew[0], xnew[1], parent_point[0][0], parent_point[0][1], parent_point[0][2]])
# 找到candidate_parent_of_xnew列表中具有最小distance的那个节点,将新节点xnew的父节点设置为该节点
return tree_list
# random relink
def random_relink(tree_list, t, xnew):
# 遍历整个列表,对每一个节点执行如下动作:
tree_list = np.array(tree_list)
for i in range(0, len(tree_list)):
parent_distance = sqrt((xnew[0] - tree_list[i, 0]) ** 2 + (xnew[1] - tree_list[i, 1]) ** 2)
if parent_distance < 1.6 * t:
child_distance = parent_distance + tree_list[
np.where((tree_list[:, 0] == xnew[0]) & (tree_list[:, 1] == xnew[1])), 4]
if tree_list[i][4] > child_distance:
tree_list[np.where((tree_list[:, 0] == xnew[0]) & (tree_list[:, 1] == xnew[1])), 2] = xnew[0]
tree_list[np.where((tree_list[:, 0] == xnew[0]) & (tree_list[:, 1] == xnew[1])), 3] = xnew[1]
tree_list[np.where((tree_list[:, 0] == xnew[0]) & (tree_list[:, 1] == xnew[1])), 4] = child_distance
for j in range(0, len(tree_list)):
if tree_list[j, 2] == tree_list[i, 0] and tree_list[j, 3] == tree_list[i, 1]:
d = sqrt((tree_list[i, 0] - tree_list[j, 0]) ** 2 + (tree_list[i, 1] - tree_list[j, 1]) ** 2)
tree_list[j, 4] = child_distance + d
return tree_list.tolist()
# 循环
while ((xnew[0] - xn) ** 2 + (xnew[1] - yn) ** 2) > 1:
xrand = product_rand(tree_list) # 随机生成点
xnear = product_near(tree_list, xrand)
xnew = decide_direction(xrand, xnear, t)
if xnear[0] != xrand[0]:
k = (xrand[1] - xnear[1]) / (xrand[0] - xnear[0])
y = k * (10 - xnear[0]) + xnear[1]
else:
y = 0
while 10 <= max(xnear[0], xnew[0]) and 10 <= min(xnear[0], xnew[0]) and 2 <= y <= 8:
xrand = product_rand(tree_list) # 随机生成点
xnear = product_near(tree_list, xrand)
xnew = decide_direction(xrand, xnear, t)
if xrand[0] - xnear[0] != 0:
k = (xrand[1] - xnear[1]) / (xrand[0] - xnear[0])
y = k * (10 - xnear[0]) + xnear[1]
tree_list = rewrite(tree_list, t, xnew)
tree_list = random_relink(tree_list, t, xnew)
plt.plot(xrand[0], xrand[1], marker='o', color='cyan')
plt.plot(xnew[0], xnew[1], color='violet', marker='o')
tree_list = np.array(tree_list)
routine_list = [[xn, yn]]
n = len(tree_list) - 1
x = tree_list[n, 0]
y = tree_list[n, 1]
f_x = tree_list[n, 2]
f_y = tree_list[n, 3]
routine_list.append([x, y])
search_list = []
while [x0, y0] not in routine_list:
search_list = tree_list[np.where((tree_list[:, 0] == f_x) & (tree_list[:, 1] == f_y))][0]
search_list = search_list.tolist()
routine_list.append([search_list[0], search_list[1]])
f_x = search_list[2]
f_y = search_list[3]
print(routine_list)
routine_list = np.array(routine_list)
plt.plot(routine_list[:, 0], routine_list[:, 1], '-', linewidth='2')
plt.show()
我需要在客户计算机上运行Ruby应用程序。通常需要几天才能完成(复制大备份文件)。问题是如果启用sleep,它会中断应用程序。否则,计算机将持续运行数周,直到我下次访问为止。有什么方法可以防止执行期间休眠并让Windows在执行后休眠吗?欢迎任何疯狂的想法;-) 最佳答案 Here建议使用SetThreadExecutionStateWinAPI函数,使应用程序能够通知系统它正在使用中,从而防止系统在应用程序运行时进入休眠状态或关闭显示。像这样的东西:require'Win32API'ES_AWAYMODE_REQUIRED=0x0
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
Rackup通过Rack的默认处理程序成功运行任何Rack应用程序。例如:classRackAppdefcall(environment)['200',{'Content-Type'=>'text/html'},["Helloworld"]]endendrunRackApp.new但是当最后一行更改为使用Rack的内置CGI处理程序时,rackup给出“NoMethodErrorat/undefinedmethod`call'fornil:NilClass”:Rack::Handler::CGI.runRackApp.newRack的其他内置处理程序也提出了同样的反对意见。例如Rack
我想用ruby编写一个小的命令行实用程序并将其作为gem分发。我知道安装后,Guard、Sass和Thor等某些gem可以从命令行自行运行。为了让gem像二进制文件一样可用,我需要在我的gemspec中指定什么。 最佳答案 Gem::Specification.newdo|s|...s.executable='name_of_executable'...endhttp://docs.rubygems.org/read/chapter/20 关于ruby-在Ruby中编写命令行实用程序
我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
我尝试运行2.x应用程序。我使用rvm并为此应用程序设置其他版本的ruby:$rvmuseree-1.8.7-head我尝试运行服务器,然后出现很多错误:$script/serverNOTE:Gem.source_indexisdeprecated,useSpecification.Itwillberemovedonorafter2011-11-01.Gem.source_indexcalledfrom/Users/serg/rails_projects_terminal/work_proj/spohelp/config/../vendor/rails/railties/lib/r
刚入门rails,开始慢慢理解。有人可以解释或给我一些关于在application_controller中编码的好处或时间和原因的想法吗?有哪些用例。您如何为Rails应用程序使用应用程序Controller?我不想在那里放太多代码,因为据我了解,每个请求都会调用此Controller。这是真的? 最佳答案 ApplicationController实际上是您应用程序中的每个其他Controller都将从中继承的类(尽管这不是强制性的)。我同意不要用太多代码弄乱它并保持干净整洁的态度,尽管在某些情况下ApplicationContr
我是一个Rails初学者,但我想从我的RailsView(html.haml文件)中查看Ruby变量的内容。我试图在ruby中打印出变量(认为它会在终端中出现),但没有得到任何结果。有什么建议吗?我知道Rails调试器,但更喜欢使用inspect来打印我的变量。 最佳答案 您可以在View中使用puts方法将信息输出到服务器控制台。您应该能够在View中的任何位置使用Haml执行以下操作:-puts@my_variable.inspect 关于ruby-on-rails-如何在我的R
这个问题在这里已经有了答案:关闭10年前。PossibleDuplicate:Pythonconditionalassignmentoperator对于这样一个简单的问题表示歉意,但是谷歌搜索||=并不是很有帮助;)Python中是否有与Ruby和Perl中的||=语句等效的语句?例如:foo="hey"foo||="what"#assignfooifit'sundefined#fooisstill"hey"bar||="yeah"#baris"yeah"另外,类似这样的东西的通用术语是什么?条件分配是我的第一个猜测,但Wikipediapage跟我想的不太一样。
如何检查Ruby文件是否是通过“require”或“load”导入的,而不是简单地从命令行执行的?例如:foo.rb的内容:puts"Hello"bar.rb的内容require'foo'输出:$./foo.rbHello$./bar.rbHello基本上,我想调用bar.rb以不执行puts调用。 最佳答案 将foo.rb改为:if__FILE__==$0puts"Hello"end检查__FILE__-当前ruby文件的名称-与$0-正在运行的脚本的名称。 关于ruby-检查是否