| 基础认知 |
|---|
Linux SDK 是由 Firefly 官方提供的 Linux 软件开发工具包,旨在方便用户基于其进行模块开发与系统定制。
各个芯片平台的 Linux SDK 目录树可能略有差异,但一般如下:
├── app # 存放上层应用 app,主要是 qcamera/qfm/qplayer/settings 等一些应用程序。
├── buildroot # 基于 buildroot (2018.02-rc3) 开发的根文件系统。
├── build.sh -> device/rockchip/common/build.sh # Linux SDK 编译脚本。
├── device # 存放各芯片板级配置和 Parameter 文件,以及一些编译与打包固件的脚本和预备文件。
├── debian # 基于debian 开发的根文件系统。
├── docs # 存放芯片模块开发指导文档、平台支持列表、芯片平台相关文档、Linux开发指南等。
├── envsetup.sh -> buildroot/build/envsetup.sh # 配置 Buildroot 编译环境脚本。
├── external # 存放第三方相关仓库,包括音频、视频、网络、recovery 等。
├── kernel # 存放 kernel 开发的代码。
├── mkfirmware.sh -> device/rockchip/common/mkfirmware.sh # rockdev 目录链接更新脚本。
├── prebuilts # 存放交叉编译工具链。
├── rkbin # 存放 Rockchip 相关的 Binary 和工具。
├── rkflash.sh -> device/rockchip/common/rkflash.sh # 固件烧写脚本。
├── tools # 存放 Linux 和 Windows 操作系统环境下常用工具。
├── u-boot # 存放基于 v2017.09 版本进行开发的 uboot 代码。
└── yocto # 基于 yocto 开发的根文件系统。
| 准备工作 |
|---|
从FireFly官网下载Ubuntu 根文件系统(64位)和Linux SDK(联系你购买开发板的商家获取)。这里我是百度网盘下载到Windows中,再用移动硬盘拷贝到Ubuntu中,其实还有很多方法,大家可以自由选择。

已安装库只会升级更新,未安装库将会安装。我安装之后没有发生环境冲突,可以放心操作。
sudo apt-get install repo git ssh make gcc libssl-dev liblz4-tool
sudo apt-get install expect g++ patchelf chrpath gawk texinfo chrpath diffstat binfmt-support
sudo apt-get install qemu-user-static live-build bison flex fakeroot cmake gcc-multilib g++-multilib
sudo apt-get install unzip device-tree-compiler ncurses-dev
输入下面命令计算MD5码,并对比所给md5sum.txt内的MD5码是否相同。
md5sum rk3588_repo_sdk_v0.1.0a.7z
然后解压sdk源代码。
7z x rk3588_repo_sdk_v0.1.0a.7z

使用repo工具链接Firefly仓库以进行SDK的初始化。
cd rk3588
.repo/repo/repo sync -l
.repo/repo/repo start rk3588/firefly --all

查看自己的版本号,这里会显示多个版本,以最后一个版本号为标准。
cd kernel
git tag
比如我SDK的版本就是v0.1.0a
rk3588/linux_release_v0.0.1a
rk3588/linux_release_v0.0.1b
rk3588/linux_release_v0.0.1c
rk3588/linux_release_v0.1.0a
复制bundle目录下的所有文件到rk3588下。
cp bundle/* rk3588/
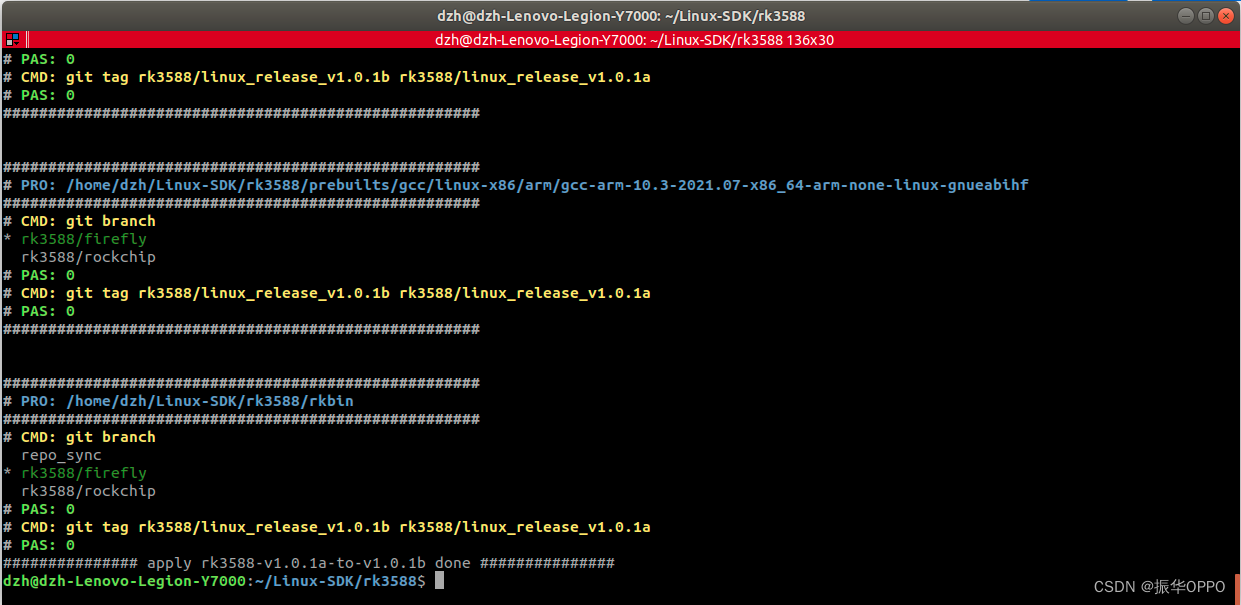
然后执行升级脚本进行升级。
./update.sh
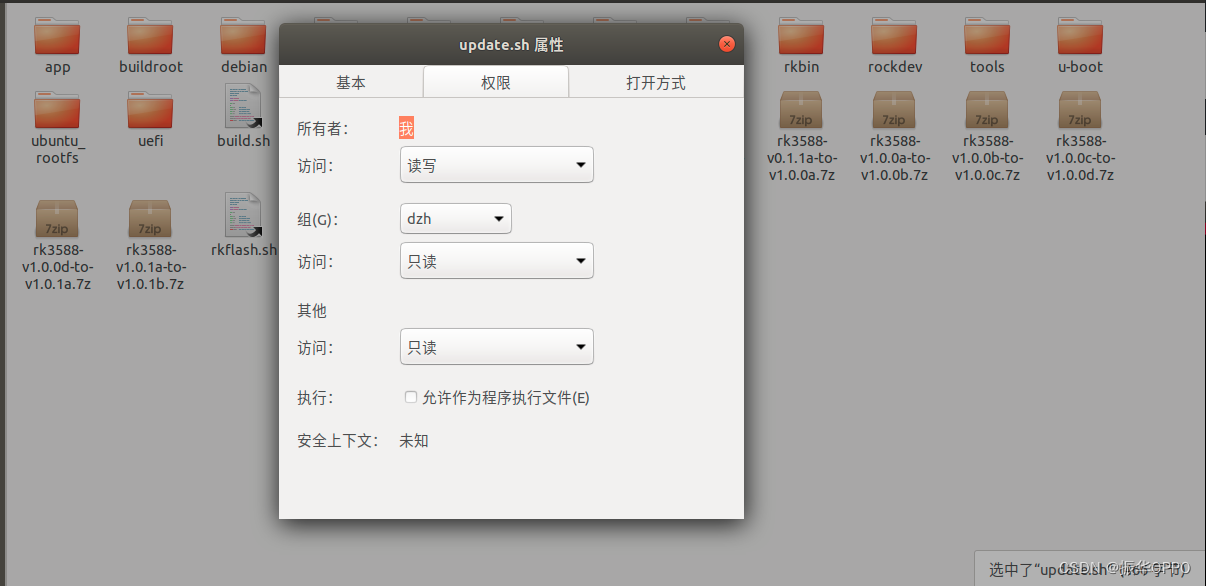
如果报错:bash: ./update.sh: 权限不够,命令sudo chmod 777 ./update.sh,可以看到执行权限发生改变。

升级完成后,再检查自己的sdk版本,发现已成功升级。

| 正式编译 |
|---|
1、将根文件系统放到rk3588目录下。
7z x Ubuntu20.04-Gnome_RK3588_v2.11-99_20220810.img.7z
mkdir ubuntu_rootfs
mv Ubuntu20.04-Gnome_RK3588_v2.11-99_20220810.img rk3588/ubuntu_rootfs/rootfs.img
2、修改drivers目录下的驱动文件(.c),修改dts目录下的设备树文件(.dtsi)以及Makefile文件,都是在kernel下,这里根据自己需求修改。
3、编译前配置,在 device/rockchip/rk3588/ 目录下,有不同板型和系统的配置文件,这里我的是itx-3588j-ubuntu.mk,大家根据需求选择板型+系统:
./build.sh device/rockchip/rk3588/itx-3588j-ubuntu.mk
 编译配置可能出现以下错误:
编译配置可能出现以下错误:
./build.sh: line 119: /home/dzh/Linux-SDK/rk3588/device/rockchip/.BoardConfig.mk: No such file or directory
修改build.sh文件第119行内容:BOARD_CONFIG=$TOP_DIR/device/rockchip/rk3588/.BoardConfig.mk,再次执行上面命令:

4、./build.sh全自动编译,非常快,2分钟就编译打包完成(不是网上说的5小时)。生成的完整固件会保存到 rockdev/pack/ 目录。
5、也可以选择单独编译某个固件,非常方便。
编译 u-boot
./build.sh uboot
编译 kernel
./build.sh extboot
编译 recovery
./build.sh recovery
更新各部分镜像链接到 rockdev/ 目录:
./mkfirmware.sh
执行命令之后,log显示如下:
dzh@dzh-Lenovo-Legion-Y7000:~/Linux-SDK/rk3588$ ./mkfirmware.sh
/usr/bin/fakeroot
create rootfs.img...done.
create parameter...done.
/home/dzh/Linux-SDK/rk3588/device/rockchip/rk3588/parameter-ubuntu-fit.txt
0x00002000@0x00004000(uboot),0x00002000@0x00006000(misc),0x00040000@0x00008000(boot:bootable),0x00040000@0x00048000(recovery),0x00010000@0x00088000(backup),0x00c00000@0x00098000(rootfs),-@0x00c98000(userdata:grow)
create misc.img...done.
warning: not found!
create uboot.img...done.
uboot fotmat type is fit, so ignore trust.img...
create loader...done.
create boot.img...done.
mkupdate.sh will resize the rootfs partition.
Image: image in rockdev is ready
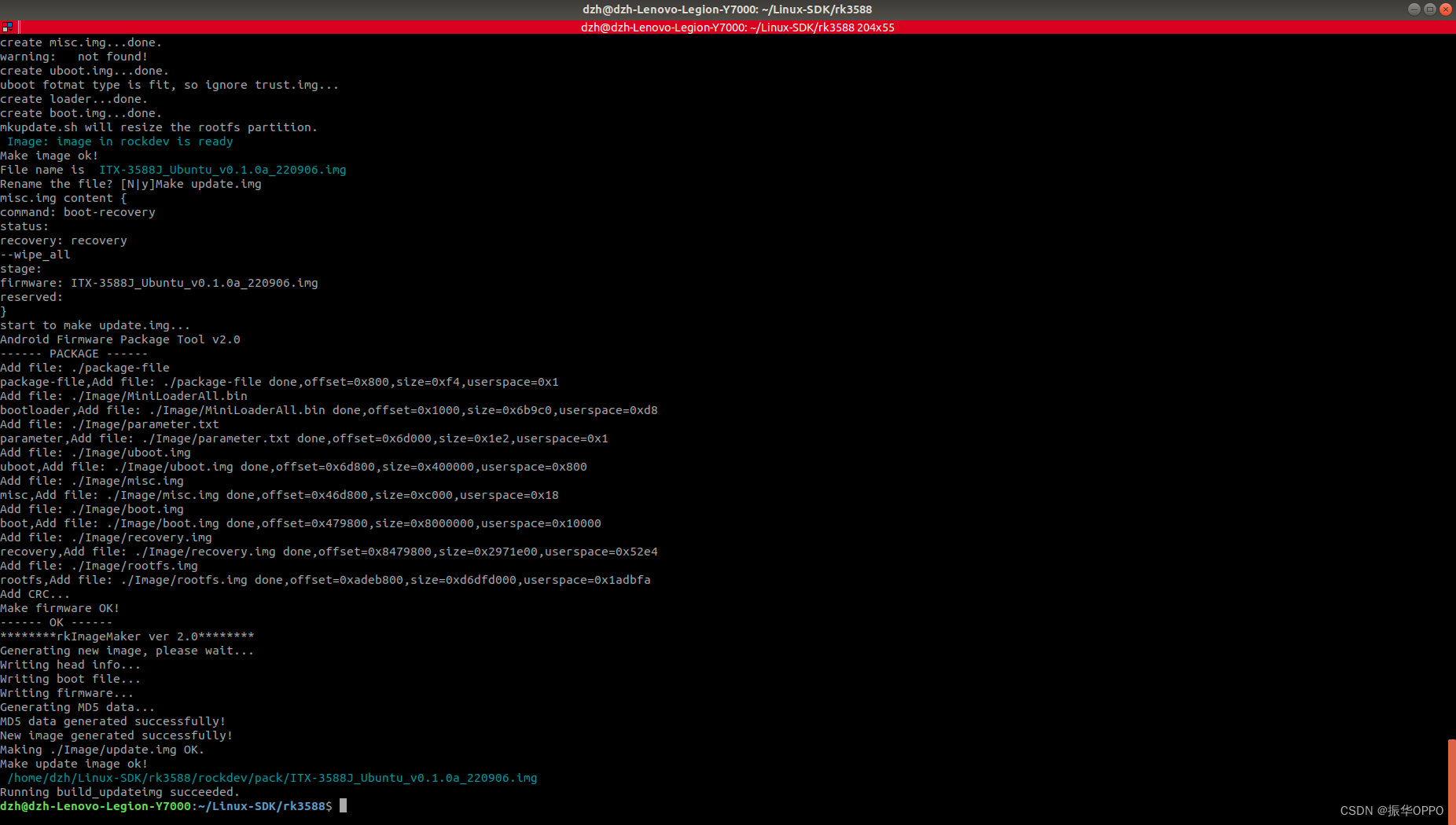
打包固件,生成的完整固件会保存到 rockdev/pack/ 目录。
./build.sh updateimg
执行命令之后,log显示如下:
Make firmware OK!
------ OK ------
********rkImageMaker ver 2.0********
Generating new image, please wait...
Writing head info...
Writing boot file...
Writing firmware...
Generating MD5 data...
MD5 data generated successfully!
New image generated successfully!
Making ./Image/update.img OK.
Make update image ok!
/home/dzh/Linux-SDK/rk3588/rockdev/pack/ITX-3588J_Ubuntu_v0.1.0a_220909.img
Running build_updateimg succeeded.
运行过程中的截图:

| 镜像烧录 |
|---|
瑞芯微ITX-3588J开发板烧录ubuntu桌面系统(图文详解)

参考资料:https://zhuanlan.zhihu.com/p/549804377
https://wiki.t-firefly.com/zh_CN/Core-3588J/linux_compile_ubuntu.html
我正在编写一个包含C扩展的gem。通常当我写一个gem时,我会遵循TDD的过程,我会写一个失败的规范,然后处理代码直到它通过,等等......在“ext/mygem/mygem.c”中我的C扩展和在gemspec的“扩展”中配置的有效extconf.rb,如何运行我的规范并仍然加载我的C扩展?当我更改C代码时,我需要采取哪些步骤来重新编译代码?这可能是个愚蠢的问题,但是从我的gem的开发源代码树中输入“bundleinstall”不会构建任何native扩展。当我手动运行rubyext/mygem/extconf.rb时,我确实得到了一个Makefile(在整个项目的根目录中),然后当
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
我们的git存储库中目前有一个Gemfile。但是,有一个gem我只在我的环境中本地使用(我的团队不使用它)。为了使用它,我必须将它添加到我们的Gemfile中,但每次我checkout到我们的master/dev主分支时,由于与跟踪的gemfile冲突,我必须删除它。我想要的是类似Gemfile.local的东西,它将继承从Gemfile导入的gems,但也允许在那里导入新的gems以供使用只有我的机器。此文件将在.gitignore中被忽略。这可能吗? 最佳答案 设置BUNDLE_GEMFILE环境变量:BUNDLE_GEMFI
我试过重新启动apache,缓存的页面仍然出现,所以一定有一个文件夹在某个地方。我没有“公共(public)/缓存”,那么我还应该查看哪些其他地方?是否有一个URL标志也可以触发此效果? 最佳答案 您需要触摸一个文件才能清除phusion,例如:touch/webapps/mycook/tmp/restart.txt参见docs 关于ruby-如何在Ubuntu中清除RubyPhusionPassenger的缓存?,我们在StackOverflow上找到一个类似的问题:
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
我正在玩HTML5视频并且在ERB中有以下片段:mp4视频从在我的开发环境中运行的服务器很好地流式传输到chrome。然而firefox显示带有海报图像的视频播放器,但带有一个大X。问题似乎是mongrel不确定ogv扩展的mime类型,并且只返回text/plain,如curl所示:$curl-Ihttp://0.0.0.0:3000/pr6.ogvHTTP/1.1200OKConnection:closeDate:Mon,19Apr201012:33:50GMTLast-Modified:Sun,18Apr201012:46:07GMTContent-Type:text/plain
我不知道为什么,但是当我设置这个设置时它无法编译设置:static_cache_control,[:public,:max_age=>300]这是我得到的syntaxerror,unexpectedtASSOC,expecting']'(SyntaxError)set:static_cache_control,[:public,:max_age=>300]^我只想将“过期”header设置为css、javaascript和图像文件。谢谢。 最佳答案 我猜您使用的是Ruby1.8.7。Sinatra文档中显示的语法似乎是在Ruby1.
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m