目录
从本节开始,计算机视觉教程进入第三章节——图像特征提取。在本章,你会见到一张简简单单的图片中蕴含着这么多你没注意到的细节特征,而这些特征将会在今后更高级的应用中发挥着极其重要的作用。本文讲解基础特征之一——图像边缘。
本文采用面向对象设计,定义了一个边缘检测类EdgeDetect,使图像边缘检测算法的应用更简洁,例如
import cv2
import numpy as np
import matplotlib.pyplot as plt
Detector = EdgeDetect('1.jpg')
Prewitt = Detector.prewitt()
plt.imshow(Prewitt , 'gray')
plt.show()
这个类的构造函数为
class EdgeDetect:
def __init__(self, img) -> None:
self.src = cv2.imread(img)
self.gray = cv2.cvtColor(self.src, cv2.COLOR_BGR2GRAY)
读取的是图像的基本信息。
图像边缘是数字图像的高频成分,对应图像梯度的极值。在二维离散数字图像上,某个方向上图像强度函数微分使用有限差分法来近似,即:
{ ∂ f ∂ x [ i , j ] ≈ f [ i + 1 , j ] − f [ i , j ] ∂ f ∂ y [ i , j ] ≈ f [ i , j + 1 ] − f [ i , j ] \begin{cases} \frac{\partial f}{\partial x}\left[ i,j \right] \approx f\left[ i+1,j \right] -f\left[ i,j \right]\\ \frac{\partial f}{\partial y}\left[ i,j \right] \approx f\left[ i,j+1 \right] -f\left[ i,j \right]\\\end{cases} {∂x∂f[i,j]≈f[i+1,j]−f[i,j]∂y∂f[i,j]≈f[i,j+1]−f[i,j]
因此图像边缘检测即是对图像的差分运算。
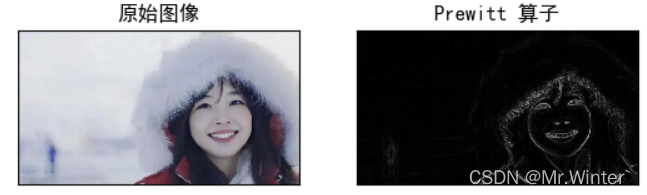
Prewitt算子本质上就是 x x x或 y y y方向上相邻像素的差分。
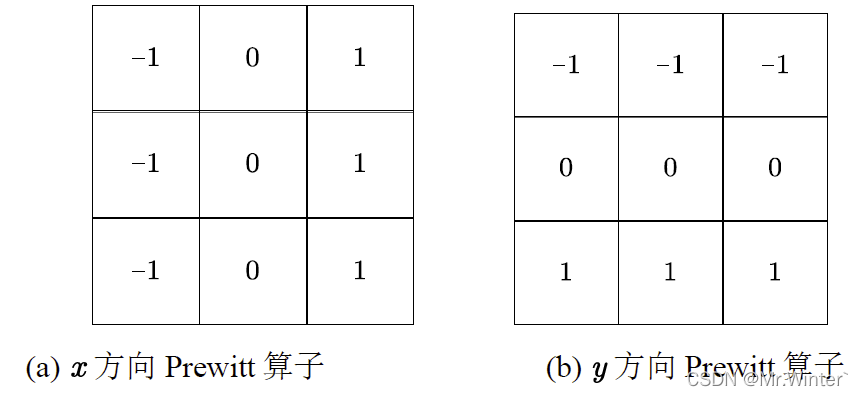
那我们常说的图像梯度是什么意思呢?
其实就是用 x x x与 y y y方向上相邻像素的差分为方向的向量
∇ f = [ ∂ f ∂ x ∂ f ∂ y ] \nabla f=\left[ \begin{matrix} \frac{\partial f}{\partial x}& \frac{\partial f}{\partial y}\\\end{matrix} \right] ∇f=[∂x∂f∂y∂f]
在编程实现上,就是构造上图的两个方向的滤波算子,然后将 x x x、 y y y两个方向的边缘合成就是整张图各方向的边缘检测结果
def prewitt(self):
# Prewitt 算子
kernelX = np.array([[1,1,1],[0,0,0],[-1,-1,-1]], dtype=int)
kernelY = np.array([[-1,0,1],[-1,0,1],[-1,0,1]], dtype=int)
# 对图像滤波
x = cv2.filter2D(self.gray, cv2.CV_16S, kernelX)
y = cv2.filter2D(self.gray, cv2.CV_16S, kernelY)
# 转 uint8 ,图像融合
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
return cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
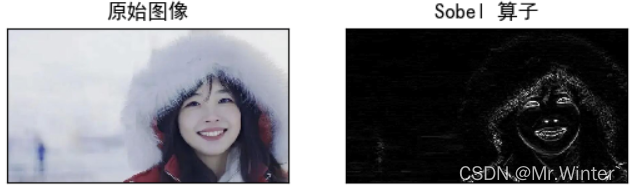
对高斯核函数 x x x、 y y y方向求导,并将其模板化即得Sobel算子。Sobel算子相比于Prewitt算子有更强的抗噪能力,因为其结合了高斯滤波的效果。

在编程实现上,就是构造上图的两个方向的滤波算子,然后将 x x x、 y y y两个方向的边缘合成就是整张图各方向的边缘检测结果
def sobel(self):
# Sobel 算子
kernelX = np.array([[1, 2, 1],[0, 0, 0],[-1, -2, -1]],dtype=int)
kernelY = np.array([[-1, -2, -1],[0, 0, 0],[1, 2, 1]],dtype=int)
# 对图像滤波
x = cv2.filter2D(self.gray, cv2.CV_16S, kernelX)
y = cv2.filter2D(self.gray, cv2.CV_16S, kernelY)
# 转 uint8 ,图像融合
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
return cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
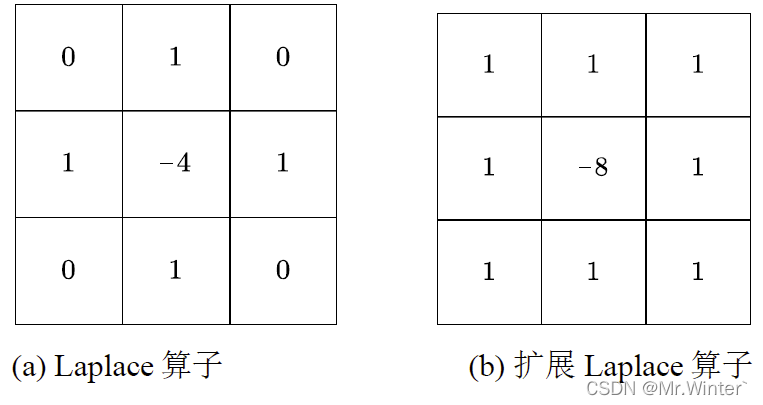
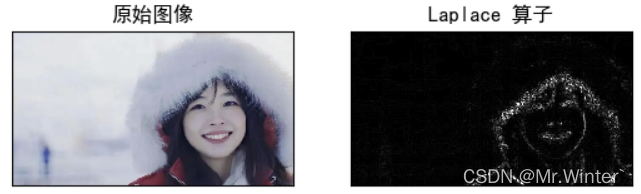
将Laplace算子
∇ 2 f = ∂ 2 f ∂ x 2 + ∂ 2 f ∂ y 2 \nabla ^2f=\frac{\partial ^2f}{\partial x^2}+\frac{\partial ^2f}{\partial y^2} ∇2f=∂x2∂2f+∂y2∂2f
写成差分方程形式为
∇ 2 f = f ( x + 1 , y ) + f ( x − 1 , y ) + f ( x , y + 1 ) + f ( x , y − 1 ) − 4 f ( x , y ) \nabla ^2f=f\left( x+1,y \right) +f\left( x-1,y \right) +f\left( x,y+1 \right) +f\left( x,y-1 \right) -4f\left( x,y \right) ∇2f=f(x+1,y)+f(x−1,y)+f(x,y+1)+f(x,y−1)−4f(x,y)
将差分方程进一步写成卷积核形式如图(a),可将其扩展为图(b)使之具有各向同性。微分算子属于高通滤波,在锐化边缘的同时也增强了噪点,因此Laplace算子抗噪能力弱,且不能检测边缘方向。
在编程实现上,就是构造上图的滤波算子
# Laplace 算子
def laplace(self):
kernel = np.array([[0, -1, 0], [-1, 4, -1], [0, -1, 0]], dtype=int)
img = cv2.filter2D(self.gray, cv2.CV_16S, kernel)
return cv2.convertScaleAbs(img)
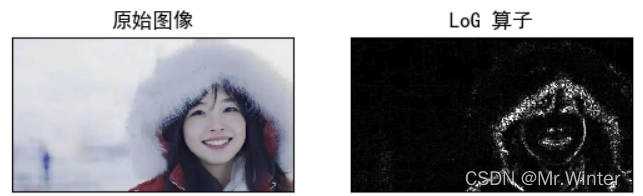
为克服Laplace算子抗噪能力弱这一问题,引入高斯-拉普拉斯算子(LoG, Laplace of Gaussian),即先低通滤除噪声,再高通强化边缘,LoG算子本质上是带通滤波器。

在编程实现上,就是构造上图的滤波算子
# LoG算子
def LoG(self):
kernel = np.array([[0, 0, 1, 0, 0], [0, 1, 2, 1, 0], [1, 2, -16, 2, 1], [0, 1, 2, 1, 0], [0, 0, 1, 0, 0]], dtype=int)
img = cv2.filter2D(self.gray, cv2.CV_16S, kernel)
return cv2.convertScaleAbs(img)
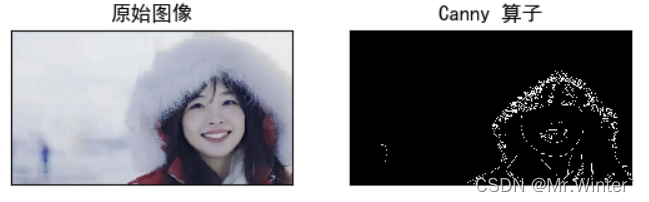
Canny边缘检测算法可以分为以下步骤。
使用如下双阈值检测算法解决因噪声引起的杂散边缘响应。
i f G p ⩾ H i g h T h r e s h o l d : G p = S t r o n g E d g e e l s e i f G p ⩾ L o w T h r e s h o l d : G p = W e a k E d g e e l s e G p = S u p p r e s s e d E d g e if\,\,G_p\geqslant HighThreshold: G_p=Strong\,\,Edge\\else\,\,if\,\,G_p\geqslant LowThreshold: G_p=Weak\,\,Edge\\else\,\, G_p=Suppressed\,\,Edge ifGp⩾HighThreshold:Gp=StrongEdgeelseifGp⩾LowThreshold:Gp=WeakEdgeelseGp=SuppressedEdge
阈值的选择取决于给定输入图像的内容。下面对弱边缘进一步审查,即
i f G p = W e a k E d g e a n d G p i s c o n n e c t e d w i t h S t r o n g E d g e : G p = S t r o n g E d g e e l s e : G p = S u p p r e s s e d E d g e if\,\,G_p=Weak\,\,Edge\,\,and\,\,G_p\,\,is\,\,connected\,\,with\,\,Strong\,\,Edge:\\\,\, G_p=Strong\,\,Edge\\else:\\\,\, G_p=Suppressed\,\,Edge ifGp=WeakEdgeandGpisconnectedwithStrongEdge:Gp=StrongEdgeelse:Gp=SuppressedEdge
通常,由真实边缘引起的弱边缘像素将连接到强边缘像素,而噪声响应未连接。为了跟踪边缘连接,通过查看弱边缘像素的8个邻域像素是否存在强边缘像素,来决定是否滤除该弱边缘点。
下面是Canny边缘检测算法的效果。
本文的完整工程代码请通过下方名片联系我获取
🔥 更多精彩专栏:
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
这里是Ruby新手。完成一些练习后碰壁了。练习:计算一系列成绩的字母等级创建一个方法get_grade来接受测试分数数组。数组中的每个分数应介于0和100之间,其中100是最大分数。计算平均分并将字母等级作为字符串返回,即“A”、“B”、“C”、“D”、“E”或“F”。我一直返回错误:avg.rb:1:syntaxerror,unexpectedtLBRACK,expecting')'defget_grade([100,90,80])^avg.rb:1:syntaxerror,unexpected')',expecting$end这是我目前所拥有的。我想坚持使用下面的方法或.join,
我有带有Logo图像的公司模型has_attached_file:logo我用他们的Logo创建了许多公司。现在,我需要添加新样式has_attached_file:logo,:styles=>{:small=>"30x15>",:medium=>"155x85>"}我是否应该重新上传所有旧数据以重新生成新样式?我不这么认为……或者有什么rake任务可以重新生成样式吗? 最佳答案 参见Thumbnail-Generation.如果rake任务不适合你,你应该能够在控制台中使用一个片段来调用重新处理!关于相关公司
这个问题在这里已经有了答案:关闭10年前。PossibleDuplicate:Pythonconditionalassignmentoperator对于这样一个简单的问题表示歉意,但是谷歌搜索||=并不是很有帮助;)Python中是否有与Ruby和Perl中的||=语句等效的语句?例如:foo="hey"foo||="what"#assignfooifit'sundefined#fooisstill"hey"bar||="yeah"#baris"yeah"另外,类似这样的东西的通用术语是什么?条件分配是我的第一个猜测,但Wikipediapage跟我想的不太一样。
什么是ruby的rack或python的Java的wsgi?还有一个路由库。 最佳答案 来自Python标准PEP333:Bycontrast,althoughJavahasjustasmanywebapplicationframeworksavailable,Java's"servlet"APImakesitpossibleforapplicationswrittenwithanyJavawebapplicationframeworktoruninanywebserverthatsupportstheservletAPI.ht
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
我想解析一个已经存在的.mid文件,改变它的乐器,例如从“acousticgrandpiano”到“violin”,然后将它保存回去或作为另一个.mid文件。根据我在文档中看到的内容,该乐器通过program_change或patch_change指令进行了更改,但我找不到任何在已经存在的MIDI文件中执行此操作的库.他们似乎都只支持从头开始创建的MIDI文件。 最佳答案 MIDIpackage会为您完成此操作,但具体方法取决于midi文件的原始内容。一个MIDI文件由一个或多个音轨组成,每个音轨是十六个channel中任何一个上的
本文主要介绍在使用Selenium进行自动化测试或者任务时,对于使用了iframe的页面,如何定位iframe中的元素文章目录场景描述解决方案具体代码场景描述当我们在使用Selenium进行自动化测试的时候,可能会遇到一些界面或者窗体是使用HTML的iframe标签进行承载的。对于iframe中的标签,如果直接查找是无法找到的,会抛出没有找到元素的异常。比如近在咫尺的例子就是,CSDN的登录窗体就是使用的iframe,大家可以尝试通过F12开发者模式查看到的tag_name,class_name,id或者xpath来定位中的页面元素,会抛出NoSuchElementException异常。解决
1.postman介绍Postman一款非常流行的API调试工具。其实,开发人员用的更多。因为测试人员做接口测试会有更多选择,例如Jmeter、soapUI等。不过,对于开发过程中去调试接口,Postman确实足够的简单方便,而且功能强大。2.下载安装官网地址:https://www.postman.com/下载完成后双击安装吧,安装过程极其简单,无需任何操作3.使用教程这里以百度为例,工具使用简单,填写URL地址即可发送请求,在下方查看响应结果和响应状态码常用方法都有支持请求方法:getpostputdeleteGet、Post、Put与Delete的作用get:请求方法一般是用于数据查询,