目录
· 概念
ROS 是 Robot Operating System 的缩写,通常称为“机器人操作系统”。但它并不是一个真正的操作系统,而是一个面向机器人的开源的元操作系统(meta-operating system),提供类似传统操作系统的诸多功能:硬件抽象、底层设备控制、常用功能实现、进程间消息传递、程序包管理等。并且提供相关工具和库,用于获取、编译、编辑代码以及在多个计算机之间运行程序完成分布式计算。
· ROS的优势
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
成功添加软件源和密钥

更新系统软件源
sudo apt-get update安装ros
sudo apt-get install ros-melodic-desktop-full安装成功

sudo rosdep init
rosdep update
若出现找不到命令如下所示
则执行如下命令后,在重复上面的初始化工作
sudo apt-get install python-rosdeprosdep init初始化遇到如下错误,通过如下操作解决

#打开hosts文件
sudo gedit /etc/hosts
#在文件末尾添加
151.101.84.133 raw.githubusercontent.com
#或者 151.101.76.133 raw.githubusercontent.com
#保存后退出再尝试
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrcsudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
成功安装rosinstall

通过命令roscore,运行ros,即可查看ros相关信息

新打开一个终端窗口,输入以下指令,运行小海龟示例程序
rosrun turtlesim turtlesim_node此时可以看到一个小海龟的窗口出现
然后再打开一个终端窗口,输入以下指令,便于控制小海龟的运动
rosrun turtlesim turtle_teleop_key保持以上窗口,然后就可以通过方向键控制小海龟的运动了,运行效果如下图

至此,关于ROS环境的安装配置就到此结束了。

点击桌面右下角摄像头图标连接PC主机摄像头
sudo apt-get install ros-melodic-uvc-camera
uvc Camera库安装成功

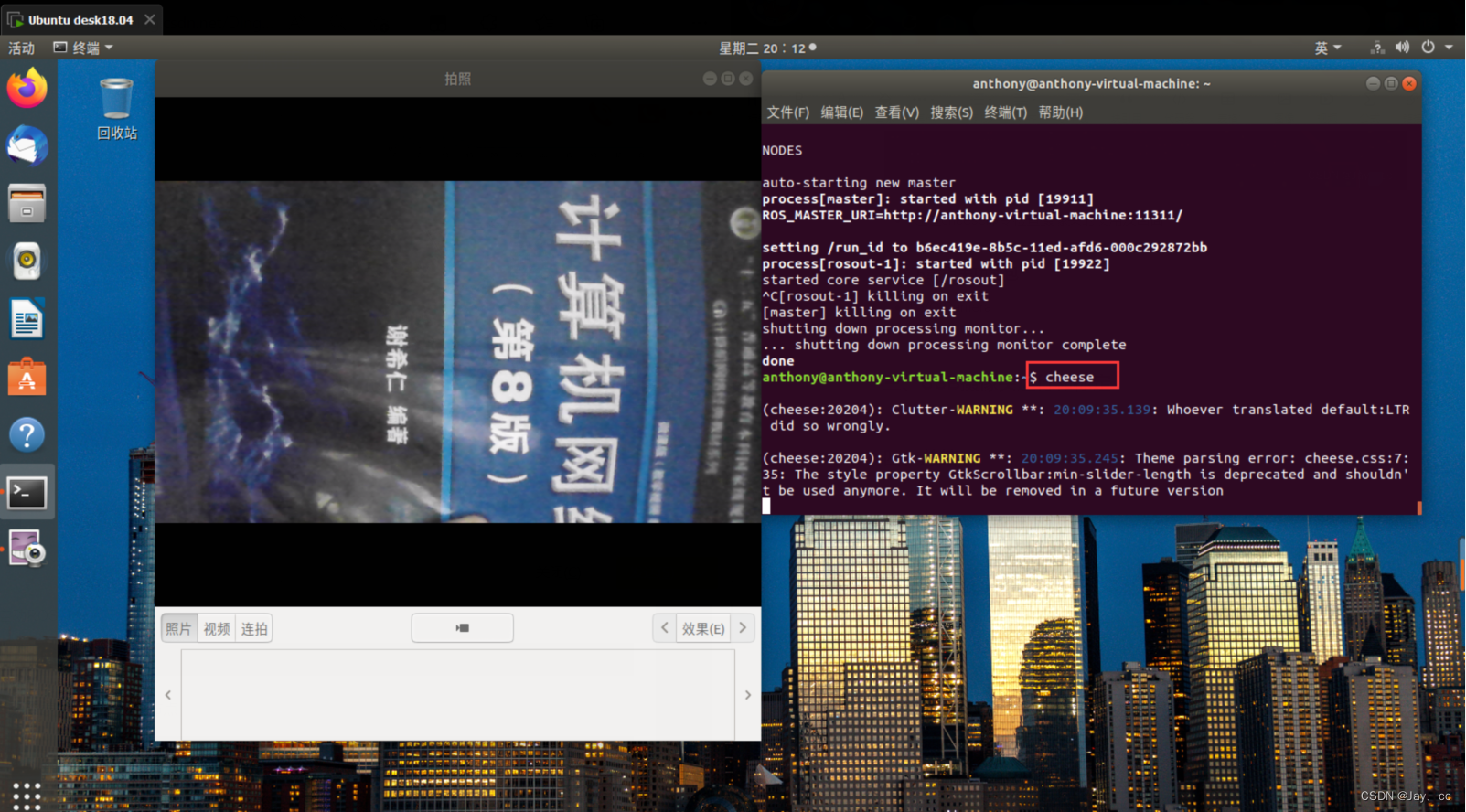
首先一个终端roscore运行ros,然后新打开一个终端键入如下指令运行camera节点
rosrun uvc_camera uvc_camera_node

再打开一个终端键入rostopic list,查看消息话题
通过rostopic echo /camera_info打印相机信息

键入指令rviz即可打开RVIz界面

添加Image窗口

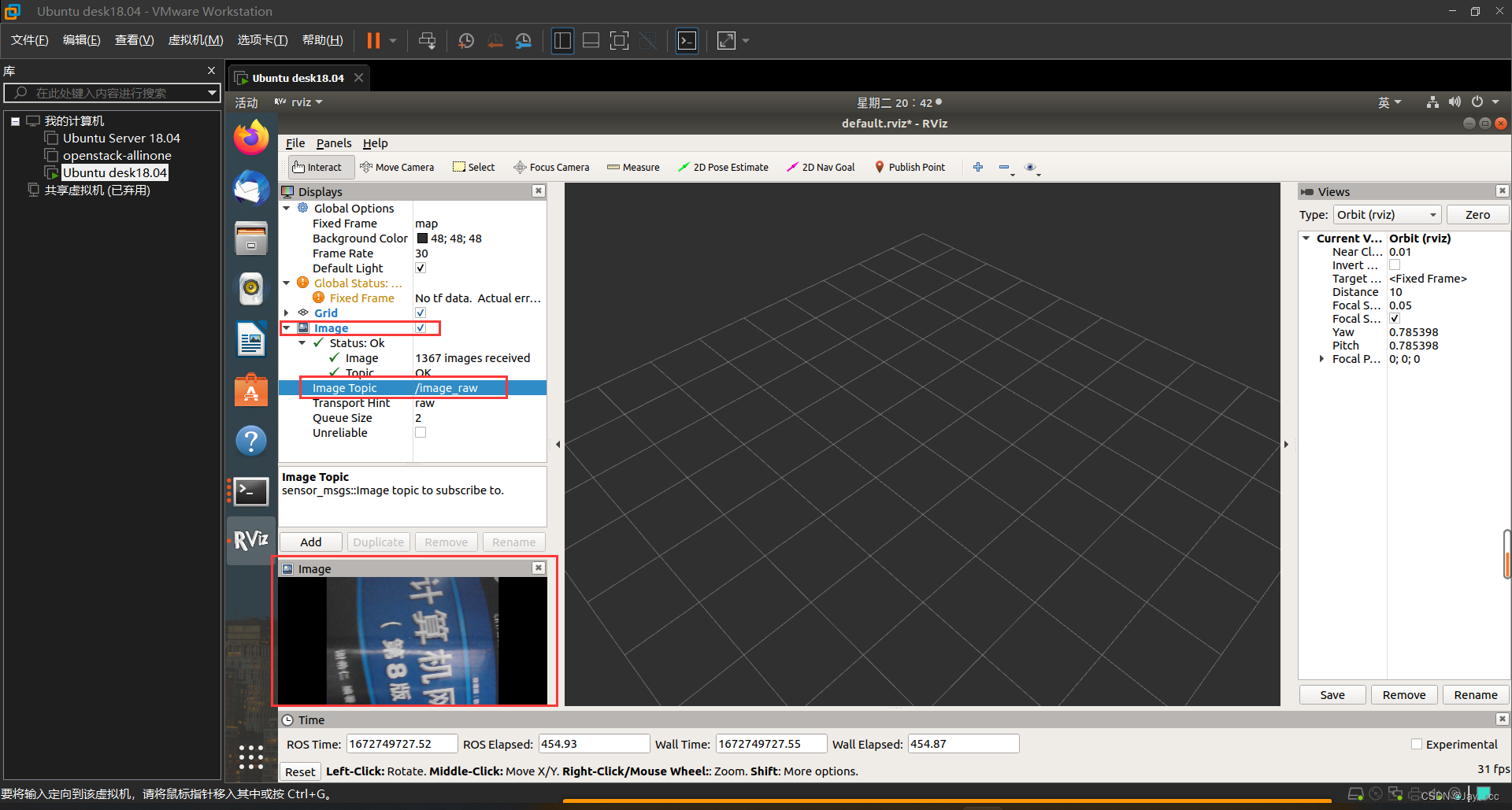
至此完成相关包的下载及Rviz的配置
sudo apt-get install ros-melodic-usb-cam
sudo apt-get install ros-melodic-camera-calibration
首先一个终端窗口roscore启动ros
然后再另外打开一个窗口开启摄像头
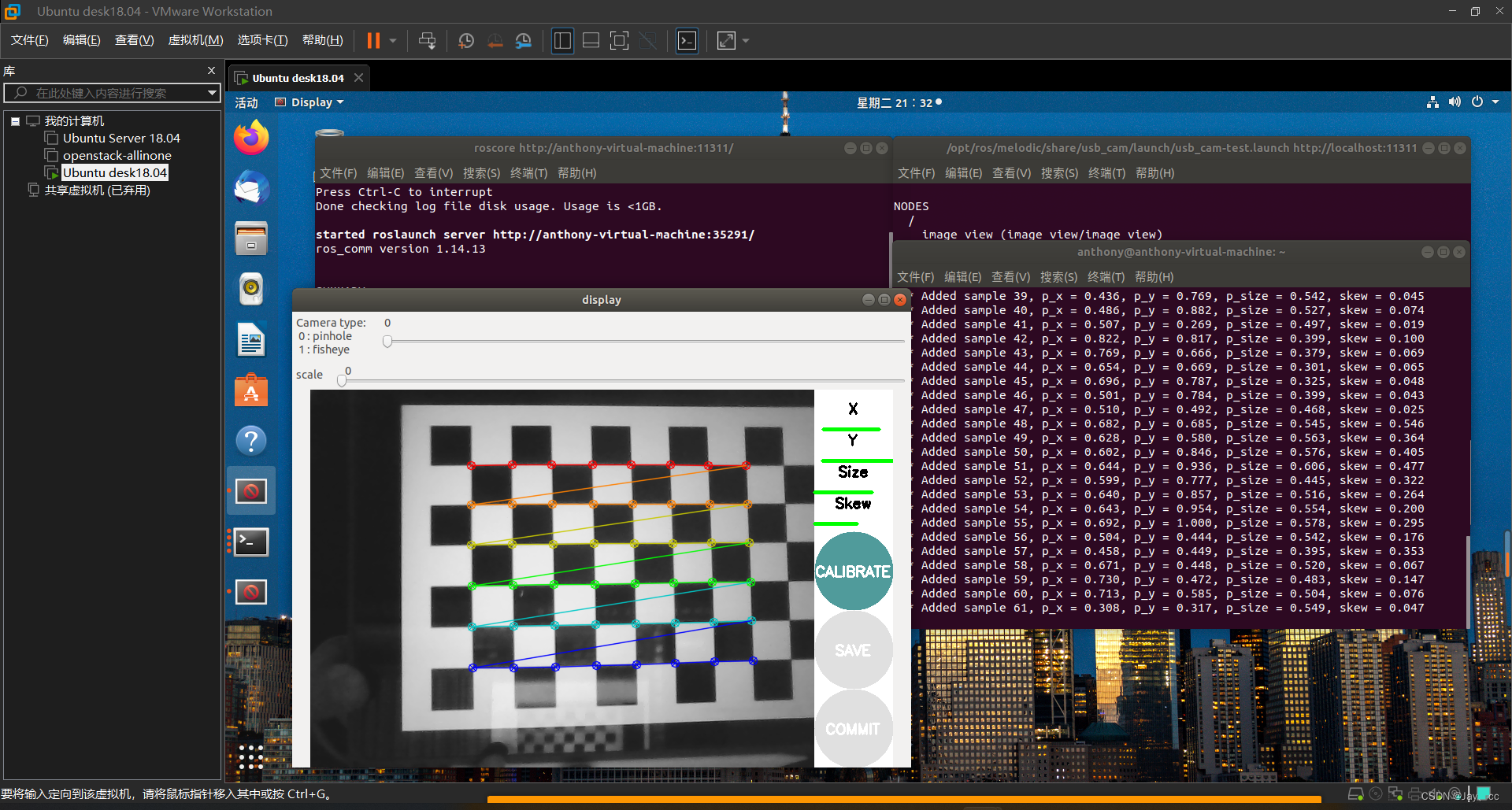
roslaunch usb_cam usb_cam-test.launch
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.02 image:=/usb_cam/image_raw camera:=/usb_cam参数含义:
1)size:标定棋盘格内部角点个数,这里使用的棋盘一共有6行,每行有8个内部角点。
2)square:这个参数对应每个棋盘格的边长,单位是米
3)image和camera:设置摄像头发布的图像话题
此时将准备好的标定靶图对准摄像头,直到CALIBRATE按钮变色,才表示标定程序的参数采集完成,此时再点击CALIBRATE按钮,标定程序开始自动计算摄像头的标定参数,这个过程需要等待一段时间。
开始标定采集

标定采集完成
标定完成
点击SAVE可保存标定参数

以上我们是完成了ROS机器人操作系统的搭建配置,以及Rviz摄像头的视频采集和及标定,这只是实时定位与建图SLAM的运行环境搭建,过程还是挺有趣的,若想进一步跑SLAM的开源项目,还需要对应安装相应库源码,像是VINS_Fusion及ORB-SLAM等,后续作者也会进一步尝试跑对应开源项目。
我正在学习如何使用Nokogiri,根据这段代码我遇到了一些问题:require'rubygems'require'mechanize'post_agent=WWW::Mechanize.newpost_page=post_agent.get('http://www.vbulletin.org/forum/showthread.php?t=230708')puts"\nabsolutepathwithtbodygivesnil"putspost_page.parser.xpath('/html/body/div/div/div/div/div/table/tbody/tr/td/div
我有一个Ruby程序,它使用rubyzip压缩XML文件的目录树。gem。我的问题是文件开始变得很重,我想提高压缩级别,因为压缩时间不是问题。我在rubyzipdocumentation中找不到一种为创建的ZIP文件指定压缩级别的方法。有人知道如何更改此设置吗?是否有另一个允许指定压缩级别的Ruby库? 最佳答案 这是我通过查看rubyzip内部创建的代码。level=Zlib::BEST_COMPRESSIONZip::ZipOutputStream.open(zip_file)do|zip|Dir.glob("**/*")d
类classAprivatedeffooputs:fooendpublicdefbarputs:barendprivatedefzimputs:zimendprotecteddefdibputs:dibendendA的实例a=A.new测试a.foorescueputs:faila.barrescueputs:faila.zimrescueputs:faila.dibrescueputs:faila.gazrescueputs:fail测试输出failbarfailfailfail.发送测试[:foo,:bar,:zim,:dib,:gaz].each{|m|a.send(m)resc
很好奇,就使用rubyonrails自动化单元测试而言,你们正在做什么?您是否创建了一个脚本来在cron中运行rake作业并将结果邮寄给您?git中的预提交Hook?只是手动调用?我完全理解测试,但想知道在错误发生之前捕获错误的最佳实践是什么。让我们理所当然地认为测试本身是完美无缺的,并且可以正常工作。下一步是什么以确保他们在正确的时间将可能有害的结果传达给您? 最佳答案 不确定您到底想听什么,但是有几个级别的自动代码库控制:在处理某项功能时,您可以使用类似autotest的内容获得关于哪些有效,哪些无效的即时反馈。要确保您的提
假设我做了一个模块如下:m=Module.newdoclassCendend三个问题:除了对m的引用之外,还有什么方法可以访问C和m中的其他内容?我可以在创建匿名模块后为其命名吗(就像我输入“module...”一样)?如何在使用完匿名模块后将其删除,使其定义的常量不再存在? 最佳答案 三个答案:是的,使用ObjectSpace.此代码使c引用你的类(class)C不引用m:c=nilObjectSpace.each_object{|obj|c=objif(Class===objandobj.name=~/::C$/)}当然这取决于
我正在尝试使用ruby和Savon来使用网络服务。测试服务为http://www.webservicex.net/WS/WSDetails.aspx?WSID=9&CATID=2require'rubygems'require'savon'client=Savon::Client.new"http://www.webservicex.net/stockquote.asmx?WSDL"client.get_quotedo|soap|soap.body={:symbol=>"AAPL"}end返回SOAP异常。检查soap信封,在我看来soap请求没有正确的命名空间。任何人都可以建议我
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
我在我的项目目录中完成了compasscreate.和compassinitrails。几个问题:我已将我的.sass文件放在public/stylesheets中。这是放置它们的正确位置吗?当我运行compasswatch时,它不会自动编译这些.sass文件。我必须手动指定文件:compasswatchpublic/stylesheets/myfile.sass等。如何让它自动运行?文件ie.css、print.css和screen.css已放在stylesheets/compiled。如何在编译后不让它们重新出现的情况下删除它们?我自己编译的.sass文件编译成compiled/t
我想将html转换为纯文本。不过,我不想只删除标签,我想智能地保留尽可能多的格式。为插入换行符标签,检测段落并格式化它们等。输入非常简单,通常是格式良好的html(不是整个文档,只是一堆内容,通常没有anchor或图像)。我可以将几个正则表达式放在一起,让我达到80%,但我认为可能有一些现有的解决方案更智能。 最佳答案 首先,不要尝试为此使用正则表达式。很有可能你会想出一个脆弱/脆弱的解决方案,它会随着HTML的变化而崩溃,或者很难管理和维护。您可以使用Nokogiri快速解析HTML并提取文本:require'nokogiri'h
我想为Heroku构建一个Rails3应用程序。他们使用Postgres作为他们的数据库,所以我通过MacPorts安装了postgres9.0。现在我需要一个postgresgem并且共识是出于性能原因你想要pggem。但是我对我得到的错误感到非常困惑当我尝试在rvm下通过geminstall安装pg时。我已经非常明确地指定了所有postgres目录的位置可以找到但仍然无法完成安装:$envARCHFLAGS='-archx86_64'geminstallpg--\--with-pg-config=/opt/local/var/db/postgresql90/defaultdb/po