以下内容皆来自于网络,只以学习为目的,不用于任何商业任务
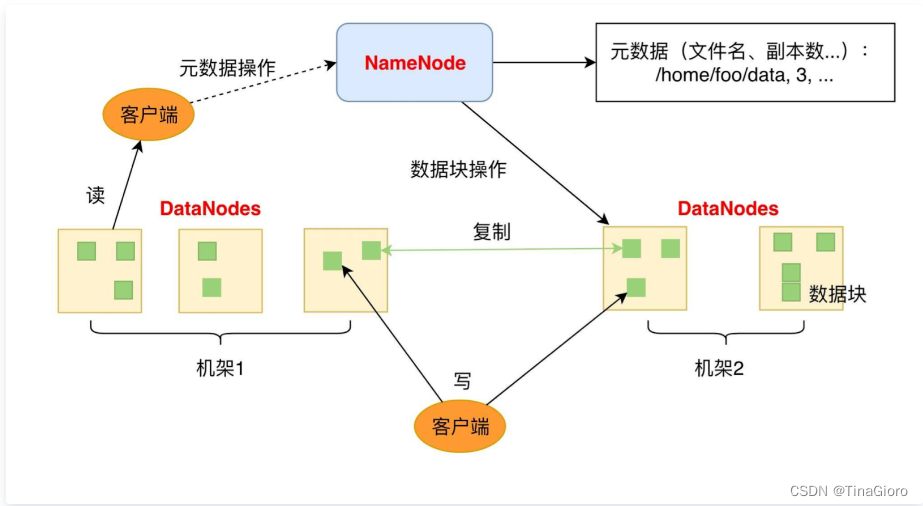
1、块(Block):将一个文件进行分块,默认大小在Hadoop2.x的版本中是128M,老版本是64M。写入后不能修改,但是可以追加。
2、NameNode 名称节点(NameNode):是master节点,保存整个文件系统的目录信息、文件信息及分块信息,如果主NameNode 失效,切换到Secondary NameNode。处理客户端读写请求。
3、数据节点(DataNode):是slave节点,分布在廉价的计算机上,用于存储Block块文件。
4、客户端(Client):它与namenode进行交互获取文件的位置信息;与datanode交互,读取或写入数据。
5、ScondaryNameNode:并非NameNode的热备,当NameNode挂掉的适合,它并不能马上替换NameNode并提供服务辅助NameNode,分担其工作量,比如定期合并Fsimage和Edits,并推送给NameNode。在紧急情况下,可辅助恢复NameNode
不同分块并行读写操作,提高吞吐量。
NameNode管理文件系统的命名空间,它维护着文件系统树及整棵树内所有的文件和目录,即元数据(MetaData)。元数据有三种存储方式:
内存元数据,目的是提升性能,定期从磁盘加载一份镜像到内存中。
命名空间镜像文件(fsImage),保存整个文件系统的目录树。
编辑日志文件(edits),记录文件系统元数据发生的所有更改,如文件的删除或添加等操作信息。
如果NameNode不可用,那么等同于整个HDFS文件系统不可用。如果NameNode由于故障导致磁盘数据丢失,那么等同于整个HDFS文件系统数据丢失。如果NameNode块映射关系的内存爆满,那么等同于整个HDFS文件系统无法再继续存储,也就是意味着NameNode内存决定了HDFS能够存储的块数量。
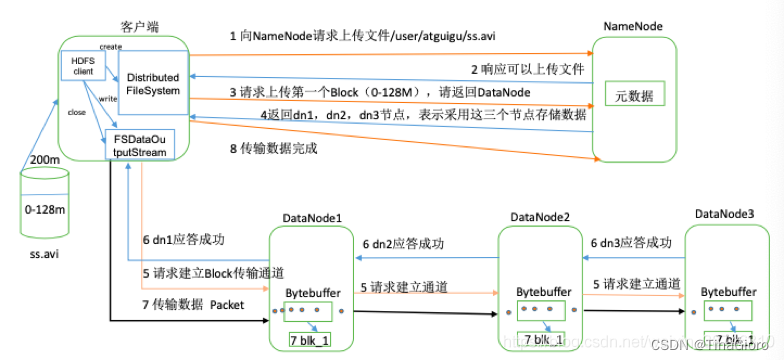
解释:
比如客户端想上传200m 的一个文件,它首先对文件做一个分块的处理,将200m的文件分成两块,一块大小是128m 另外一块大小是 72m。
接下来客户端创建一个Distributed File System,通过FS模块向 NameNode 请求上传文件,NameNode 检查目标文件是否存在,父目录是否存在。返回是否可以上传。如果可以上传,客户端请求第一个block上传到哪几个Datanode的服务器上。NameNode 检测datanode 信息池,返回可用的3个datanode。这3个datamode是按照网络拓扑排序的,离客户端越近的会有优先级。
接下来客户端通过 FSDataOutputStream 模块与 dn1 建立连接,请求数据传输,并建立Pipeline 管道。在dn1与dn2、dn2 与 dn3之间建立通道。建立管道的意义是说如果没有管道需要上传3次给dn1 dn2 和 dn3。 pipeline 建立完毕后会返回成功信息。
接下来第7步,建立信息传输流,客户端开始往 dn1上传第一个block,以packet 为单位传输数据,大小为 64k。dn1 接收到渊源不断的数据包会复制保存,然后不做拦截,数据包通过pipeline 管道流向dn2,复制保存,再到dn3。
数据保存成功后,客户端会再次请求namenode上传第二个block。
————————————————
版权声明:本文为CSDN博主「蕾欧娜等等」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_38746310/article/details/108087122
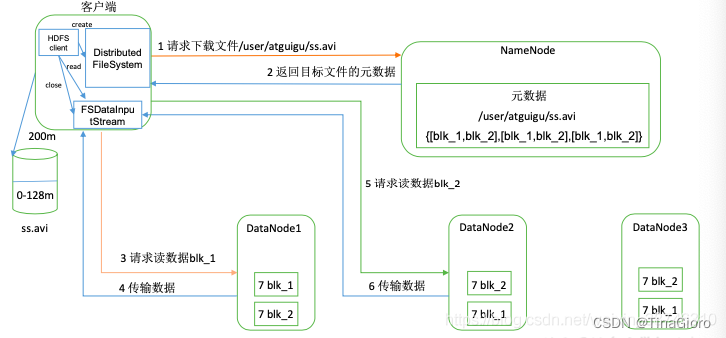
读数据流程相比于写会更简单一些。
客户端依然需要通过 DistributedFilesystem 向NameNode 请求下载文件,NameNode通过查询元数据,找到目标文件块所在的DataNode 地址。并返回给客户端。
客户端会按照就近原则,然后选一台Datanode 服务器,建立连接,请求读取数据。然后DataNode 开始传输数据给客户端(先从磁盘里读取数据输入流,以Packet为单位来做检验)
客户端以packet为单位接收,先在本地缓存,然后写入目标文件。
————————————————
版权声明:本文为CSDN博主「蕾欧娜等等」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_38746310/article/details/108087122
问题产生:NameNode中的元数据存储在内存中,存在断电后,元数据丢失的问题。
解决方案:在磁盘中产生FsImage备份元数据。
新的问题:当在内存中的元数据更新时,若同时更新 FsImage,会让效率降低,不更新会产生不一致问题。
解决方案:引入 Edits 文件(只进行追加操作,效率很高)。每当元数据有更新或添加元数据时,修改内存中的元数据并追加到 Edits 中。当 NameNode 节点断电,可以通过 FsImage 和 Edits 的合并,合并元数据。
新的问题:长时间添加数据到 Edits 中,会导致文件数据过大,效率降低,断电恢复元数据的时间过长。因此需要的定期进行 FsImage 和 Edits 的合并。若由 NameNode 节点来完成该操作,效率又会降低。
解决方案:引入新的节点 SecondaryNameNode,专门用于 FsImage 和 Edits 的合并。
Fsimage: NameNode 内存中元数据序列化后形成的文件。
Edits: 记录客户端更新元数据信息的每一步操作(可通过 Edits 运算出元数据)。
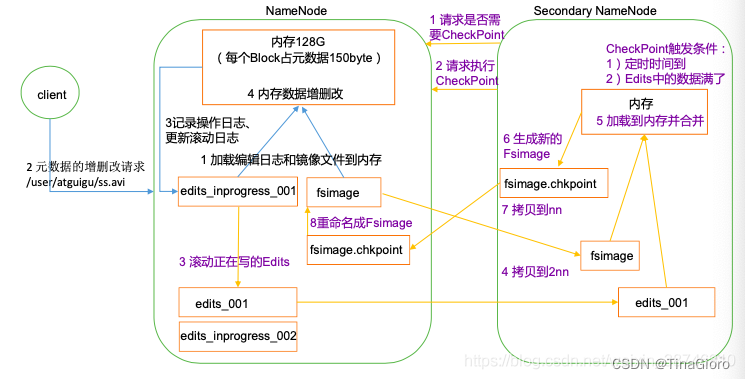
NameNode 启动时,先滚动 Edits 并生成一个空的 edits.inprogress,然后加载 Edits 和 Fsimage 到内存中,此时 NameNode 内存就持有最新的元数据信息。
Client 开始对 NameNode 发送元数据的增删改的请求,这些请求的操作首先会被记录到 edits.inprogress 中(查询元数据 的操作不会被记录在 Edits 中,因为查询操作不会更改元数据信息),如果此时 NameNode 挂掉,重启后会从 Edits 中读取元数据的信息。然后,NameNode 会在内存中执行元数据的增删改的操作。
由于 Edits 中记录的操作会越来越多,Edits 文件会越来越大,导致 NameNode 在启动加载 Edits 时会很慢,所以需要对 Edits 和 Fsimage 进行合并(所谓合并,就是将 Edits 和 Fsimage 加载到内存中,照着 Edits 中的操作一步步执行,最终形成新的 Fsimage)。 SecondaryNameNode 的作用就是帮助 NameNode 进行 Edits 和 Fsimage 的合并工作。
SecondaryNameNode 首先会询问 NameNode 是否需要 CheckPoint(触发 CheckPoint 需要 满足两个条件中的任意一个,定时时间到和 Edits 中数据写满了)。直接带回 NameNode 是否检查结果。SecondaryNameNode 执行 CheckPoint 操作,首先会让 NameNode 滚动 Edits 并生成一个空的 edits.inprogress,滚动 Edits 的目的是给 Edits 打个标记,以后所有新的操 作都写入 edits.inprogress,其他未合并的 Edits 和 Fsimage 会拷贝到 SecondaryNameNode 的本地,然后将拷贝的 Edits 和 Fsimage 加载到内存中进行合并,生成 fsimage.chkpoint, 然后将 fsimage.chkpoint 拷贝给 NameNode,重命名为 Fsimage 后替换掉原来的 Fsimage。 NameNode 在启动时就只需要加载之前未合并的 Edits 和 Fsimage 即可,因为合并过的 Edits 中的元数据信息已经被记录在 Fsimage 中。
————————————————
版权声明:本文为CSDN博主「蕾欧娜等等」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_38746310/article/details/108087122
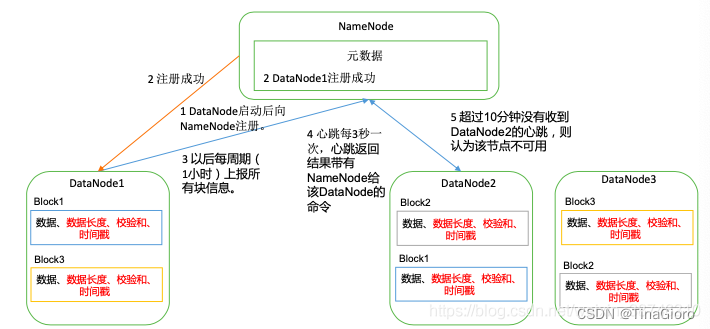
一个数据块在 DataNode 上以文件形式存储在磁盘上,包括两个文件,一个是数据本 身,一个是元数据包括数据块的长度,块数据的校验和,以及时间戳。
DataNode 启动后向 NameNode 注册,通过后,周期性(1 小时)的向 NameNode 上 报所有的块信息。
心跳是每 3 秒一次,心跳返回结果带有 NameNode 给该 DataNode 的命令如复制块数 据到另一台机器,或删除某个数据块。如果超过 10 分钟没有收到某个 DataNode 的心跳,则 认为该节点不可用。
集群运行中可以安全加入和退出一些机器。
————————————————
版权声明:本文为CSDN博主「蕾欧娜等等」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_38746310/article/details/108087122
HDFS的高可用指的是HDFS持续对各类客户端提供读、写服务的能力,因为客户端对HDFS的读、写操作之前都要访问name node服务器,只有从name node获取元数据之后才能继续进行读、写。所以HDFS的高可用的关键在于name node上的元数据持续可用。
在 hadoop 1.x 的 HDFS 框架中只存在一个 namenode 节点,当这个 namenode 节点出现内存溢出、宕机等意外情况之后,整个系统就会停止服务,直到我们重启这个 namenode 节点。为了解决这个问题,在 hadoop2.x 的 HDFS 框架中,实现了 HA 的机制。
在高可用配置下,edit log不再存放在NameNode,而是存放在一个共享存储的地方,这个共享存储由奇数个Journal Node组成,一般是3个节点(JN小集群), 每个JN专门用于存放来自NN的 edit 日志,edit 日志由活跃状态的名称节点写入JN小集群。
解释:
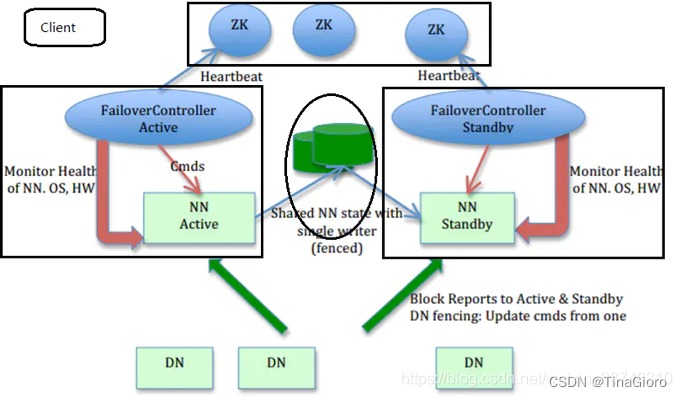
Active NameNode 和 Standby NameNode:两台 NameNode 形成互备,一台处于 Active 状态,为主 NameNode,另外一台处于 Standby 状态,为备 NameNode,只有主 NameNode 才能对外提供读写服务。
主备切换控制器 ZKFailoverController:ZKFailoverController 作为独立的进程运行,对 NameNode 的主备切换进行总体控制。ZKFailoverController 能及时检测到 NameNode 的健康状况,在主 NameNode 故障时借助 Zookeeper 实现自动的主备选举和切换,当然 NameNode 目前也支持不依赖于 Zookeeper 的手动主备切换。
Zookeeper 集群:为主备切换控制器提供主备选举支持。
共享存储系统:共享存储系统是实现 NameNode 的高可用最为关键的部分,共享存储系统保存了 NameNode 在运行过程中所产生的 HDFS 的元数据。Active NameNode 和 Standby NameNode 通过共享存储系统实现元数据同步。在进行主备切换的时候,新的主 NameNode 在确认元数据完全同步之后才能继续对外提供服务。
可以看出,这里的核心是共享存储的实现,下面为大家介绍一种基于 QJM(Quorum Journal Manager)的默认存储方案。方案合并到 HDFS 的 trunk 之中并且作为默认的共享存储实现。
基于 QJM 的共享存储系统主要用于保存 EditLog,并不保存 FSImage 文件。FSImage 文件还是在 NameNode 的本地磁盘上。
QJM 共享存储的基本思想来自于 Paxos 算法,采用多个称为 JournalNode 的节点组成的 JournalNode 集群来存储 EditLog。每个 JournalNode 保存同样的 EditLog 副本。每次 NameNode 写 EditLog 的时候,除了向本地磁盘写入 EditLog 之外,也会并行地向 JournalNode 集群之中的每一个 JournalNode 发送写请求,只要大多数 (majority) 的 JournalNode 节点返回成功就认为向 JournalNode 集群写入 EditLog 成功。
如果有 2N+1 台 JournalNode,那么根据大多数的原则,最多可以容忍有 N 台 JournalNode 节点挂掉。

Active NameNode 提交 EditLog 到 JournalNode 集群
Standby NameNode 从 JournalNode 集群同步 EditLog
虽然 Active NameNode 向 JournalNode 集群提交 EditLog 是同步的,但 Standby NameNode 采用的是定时从 JournalNode 集群上同步 EditLog 的方式,那么 Standby NameNode 内存中文件系统镜像有很大的可能是落后于 Active NameNode 的,所以 Standby NameNode 在转换为 Active NameNode 的时候需要把落后的 EditLog 补上来。
HDFS 是具有很好的容错性的分布式存储系统,它利用复制技术实现数据容错能力,数据会被复制多份并存储在集群的不同节点。这样,集群中的某些机器宕机了,数据还可以从其他正常运行的机器获取。如果有一个机器宕机了,HDFS 会在其他可用的机器创建数据的副本,来保证该数据的副本数与集群的副本因子是一致的。
故障类型
我们来看看出现的故障类型。
• 节点失败:即DataNode节点失败。
• 网络故障:无法发送和接收数据。
• 数据损坏:数据在不稳定的网络传输中或在硬盘中存储出错。
故障检测机制
针对这三类故障的检测机制是这样的。
节点失败检测机制
• 每个DataNode以固定的周期向NameNode 发送心跳信号,通过这种方法告诉 NameNode 它们在正常工作。如果在一定的时间内 NameNode 没有收到 DataNode 心跳,就认为该 DataNode 宕机了。
通信故障检测机制
• 只要发送了数据,接收方就会返回确认码。如果经过几次重试之后,还是没有收到确认码,发送方会认为主机挂了或网络发生故障。
数据错误检测机制
• 在传输数据的时候,同时会发送总和检验码,当数据存储到硬盘时,总和检验码也会被存储。
• 所有的 DataNode 都会定期向 NameNode 发送数据块的存储状况。
• 在发送数据块报告前,会先检查总和校验码是否正确,如果数据存在错误就不发送该数据块的信息。
数据块存储故障:数据存储的故障容错,这块主要是磁盘介质,存储数据可能会出现错乱。在DataNode数据块上存储数据时会计算并存储校验和,当对该数据块进行读操作时会计算数据校验和,如果一场就会转而去读其他DataNode节点的备份数据。
DataNode节点故障主要是通过心跳机制,DataNode会定期通过心跳去NameNode保持联系,Namenode监测到DataNode超时没有心跳后,就会查其元数据,通知其他节点复制失效节点上的数据块到其他服务器上,保证副本数量,磁盘故障的话DataNode也是类似处理,DataNode检测到磁盘故障后,将故障块反馈给namenode进行数据块复制。
基础版云数据库RDS的产品系列包括基础版、高可用版、集群版、三节点企业版,本文介绍基础版实例的相关信息。RDS基础版实例也称为单机版实例,只有单个数据库节点,计算与存储分离,性价比超高。说明RDS基础版实例只有一个数据库节点,没有备节点作为热备份,因此当该节点意外宕机或者执行重启实例、变更配置、版本升级等任务时,会出现较长时间的不可用。如果业务对数据库的可用性要求较高,不建议使用基础版实例,可选择其他系列(如高可用版),部分基础版实例也支持升级为高可用版。基础版与高可用版的对比拓扑图如下所示。优势 性能由于不提供备节点,主节点不会因为实时的数据库复制而产生额外的性能开销,因此基础版的性能相对于
我是一名决定学习Ruby和RubyonRails的ASP.NETMVC开发人员。我已经有所了解并在RoR上创建了一个网站。在ASP.NETMVC上开发,我一直使用三层架构:数据层、业务层和UI(或表示)层。尝试在RubyonRails应用程序中使用这种方法,我发现没有关于它的信息(或者也许我只是找不到它?)。也许有人可以建议我如何在RubyonRails上创建或使用三层架构?附言我使用ruby1.9.3和RubyonRails3.2.3。 最佳答案 我建议在制作RoR应用程序时遵循RubyonRails(RoR)风格。Rails
我尝试用Ruby设计一个基于Web的应用程序。我开发了一个简单的核心应用程序,在没有框架和数据库的情况下在六边形架构中实现DCI范例。核心六边形中有小六边形和网络,数据库,日志等适配器。每个六边形都在没有数据库和框架的情况下自行运行。在这种方法中,我如何提供与数据库模型和实体类的关系作为独立于数据库的关系。我想在将来将框架从Rails更改为Sinatra或数据库。事实上,我如何在这个核心Hexagon中实现完全隔离的rails和mongodb的数据库适配器或框架适配器。有什么想法吗? 最佳答案 ROM呢?(Ruby对象映射器)。还有
“架设一个亿级高并发系统,是多数程序员、架构师的工作目标。许多的技术从业人员甚至有时会降薪去寻找这样的机会。但并不是所有人都有机会主导,甚至参与这样一个系统。今天我们用12306火车票购票这样一个业务场景来做DDD领域建模。”开篇要实现软件设计、软件开发在一个统一的思想、统一的节奏下进行,就应该有一个轻量级的框架对开发过程与代码编写做一定的约束。虽然DDD是一个软件开发的方法,而不是具体的技术或框架,但拥有一个轻量级的框架仍然是必要的,为了开发一个支持DDD的框架,首先需要理解DDD的基本概念和核心的组件。一.什么是领域驱动设计(DDD)首先要知道DDD是一种开发理念,核心是维护一个反应领域概
我在当前项目中使用由Oracle数据库和memcached支持的RubyonRails。有一个非常常用的功能,它依赖于单个数据库View作为数据源,并且该数据源内部有其他数据库View和表。这是一个虚拟数据库View,能够从一个地方访问所有内容,而不是物化数据库View。大多数情况下,如果用户正在使用他们希望更新的功能,那么让数据保持最新很重要。从这个View获取数据时,我将安全表内部连接到View(安全表不是View本身的一部分),其中包含一些我们用来在更细粒度级别上控制数据访问的字段。例如,安全表有user_id,prop_1,prop_2列,其中prop_1,prop_2是数据库
我正在开发一个包含大约10个不同功能组件的Sinatra应用程序。我们希望能够将这些组件混合并匹配到应用程序的单独实例中,完全从config.yaml文件配置,如下所示:components:-route:'/chunky'component_type:FoodListercomponent_settings:food_type:baconmax_items:400-route:'places/paris'component_type:Mappercomponent_settings:latitude:48.85387273165654longitude:2.340087890625-
文章目录⭐️赠书活动-《从程序员到架构师》⭐️编辑推荐⭐️作者简介⭐️赠书活动→获奖名单⭐️赠书活动-《从程序员到架构师》内容简介:《从程序员到架构师:大数据量、缓存、高并发、微服务、多团队协同等核心场景实战》分为数据持久化层场景实战、缓存层场景实战、基于常见组件的微服务场景实战、微服务进阶场景实战和开发运维场景实战5个部分。基于对十余个架构搭建与改造项目的经验总结,介绍了大数据量、缓存、高并发、微服务、多团队协同等核心场景下的架构设计常见问题及其通用技术方案,包含冷热分离、查询分离、分表分库、秒杀架构、注册发现、熔断、限流、微服务等具体需求下的技术选型、技术原理、技术应用、技术要点等内容,将
我想要一个非常基本的小型基础程序示例,它读入两个插件并注册它们。这两个插件以相同的方式以不冲突的方式挂接到基础程序。就此而言,我对任何编程语言的元编程都很陌生,我不确定从哪里开始。 最佳答案 我已经研究这个问题一段时间了。我尝试了很多不同的方法来做这件事,并征求了很多人的建议。我仍然不确定我所拥有的是否是“正确的方法”,但它运作良好并且很容易做到。在我的例子中,我专门查看配置并引入配置插件,但原理是相同的,即使我的术语特定于cnfiguration。在非常基础的层面上,我有一个配置类,里面什么都没有——它是空的。我还有一个Confi
关闭。这个问题不符合StackOverflowguidelines.它目前不接受答案。要求我们推荐或查找工具、库或最喜欢的场外资源的问题对于StackOverflow来说是偏离主题的,因为它们往往会吸引自以为是的答案和垃圾邮件。相反,describetheproblem以及迄今为止为解决该问题所做的工作。关闭9年前。Improvethisquestion我是一个喜欢视觉的人,想知道是否有关于Ruby的不错的大概览。你知道,就像一张引用海报,带有对象层次结构,最常用的方法等等,都是彩色的,布局清晰明了...对于像我这样的初学者来说,这会很棒......有没有你使用或偶然发现的类似东西?
文章目录实验二:HDFS+MapReduce数据处理与存储实验1.实验目的2.实验环境3.实验内容3.1HDFS部分3.1.1上传文件3.1.2下载文件3.1.3显示文件信息3.1.4显示目录信息3.1.5删除文件3.1.6移动文件3.2MapReduce部分3.2.0Mapreduce原理3.2.1合并和去重3.2.1.1编写Merge.java代码3.2.1.2编译执行3.2.2文件的排序3.2.2.1编写Sort.java代码3.2.2.2编译执行4.踩坑记录5.心得体会6.源码附录6.1Merge.java完整代码6.2Sort.java完整代码实验二:HDFS+MapReduce数据