目录
提示:这里可以添加本文要记录的大概内容:
在Ubuntu20.04安装,从安装依赖项开始,前前后后加起来差不多弄了七八个小时,踩了不少坑。
2.《视觉SLAM十四讲》第二版。
包括Pangolin 、 OpenCV 、 Eigen 、 g2o 与 DBoW2(后两项在ORB-SLAM2里面自带不要自己装)
首先安装 vim 、 cmake 、 git 、 gcc 、 g++,
sudo apt-get install vim cmake
sudo apt-get install git
sudo apt-get install gcc g++因为这些之前装过了所以没什么问题。
安装Pangolin,
1. 安装依赖项
sudo apt-get install libglew-dev
sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev
sudo apt-get install libpython2.7-dev2.安装Pangolin
一开始我使用了如下命令进行安装
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake -DCPP11_NO_BOOSR=1 ..
make -j
但是当cmake的时候报错了,报错内容大概就是could not find Eigen 3。
然后参考了这篇ORB_SLAM2安装Pangolin报错缺少Eigen3_陨越的博客-CSDN博客
问题就解决了。总结一下就是卸载现有Pangolin,重新安装0.5版的,过程如下:
cd /usr/local/include
ls
看是不是有个叫pangolin的文件夹,有就把它删了。还有用户文件夹里的Pangolin的文件夹也删了
然后重新下载Pangolin0.5解压了后执行
cd Pangolin
mkdir build
cd build
cmake ..
make -j
安装OpenCV(我装的是3.4.5)
一开始我是用的命令行安装
sudo apt install libopencv-dev大概耗时1小时左右装好了但是测试了一下不能用,而且也不能指定版本最后还是卸载了,重新源码装了3.4.5的。这个是下载链接https://codeload.github.com/opencv/opencv/tar.gz/refs/tags/3.4.5
如果要装其他版本建议去OpenCV官网找对应版本下载安装即可。
安装依赖项
sudo apt-get install build-essential libgtk2.0-dev libjpeg-dev libtiff5-dev libopenexr-dev libtbb-dev
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libgtk-3-dev libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev pkg-config下载好源码并解压后执行
cd opencv-3.4.5/
mkdir build
cd build
cmake ..
make -j4
sudo make install因为编译过程比较慢,我这里就选择了4线程。安装完成后要改两个文件
sudo gedit /etc/ld.so.conf在文件中加上 include /usr/local/lib

保存后再执行
sudo ldconfigsudo gedit /etc/bash.bashrc在文件末尾加上PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH

然后
source /etc/bash.bashrc
sudo updatedb最后查看版本信息:
pkg-config opencv --modversion 
测试:
cd opencv-3.4.5/samples/cpp/example_cmake
cmake .
make
./opencv_example 
安装成功则会显示版本号和如图所示的窗口。
安装Eigen
先说遇到的坑,就是gitlab连不上,中间查了各种办法都没成功,最终解决办法也很玄学。。。等到第二天就好了,,,,这里放一个eigen3.3.7的压缩包到网盘,让后来者少走弯路吧。如果需要其他版本也可以去eigen官网下载。
链接: https://pan.baidu.com/s/1BTNW-TBb9lQP25X_QXj-LA 提取码: 87ma 复制这段内容后打开百度网盘手机App,操作更方便哦
解压之后执行如下命令
cd eigen-git-mirror
mkdir build
cd build
cmake ..
sudo make install#安装后 头文件安装在/usr/local/include/eigen3/
#需要移动头文件
sudo cp -r /usr/local/include/eigen3/Eigen /usr/local/include最后测试一下:
touch eigen-test.cpp
gedit eigen-test.cpp#include <iostream>
#include <Eigen/Dense>
//using Eigen::MatrixXd;
using namespace Eigen;
using namespace Eigen::internal;
using namespace Eigen::Architecture;
using namespace std;
int main()
{
cout<<"*******************1D-object****************"<<endl;
Vector4d v1;
v1<< 1,2,3,4;
cout<<"v1=\n"<<v1<<endl;
VectorXd v2(3);
v2<<1,2,3;
cout<<"v2=\n"<<v2<<endl;
Array4i v3;
v3<<1,2,3,4;
cout<<"v3=\n"<<v3<<endl;
ArrayXf v4(3);
v4<<1,2,3;
cout<<"v4=\n"<<v4<<endl;
}g++ eigen-test.cpp -o eigen-test
./eigen-test
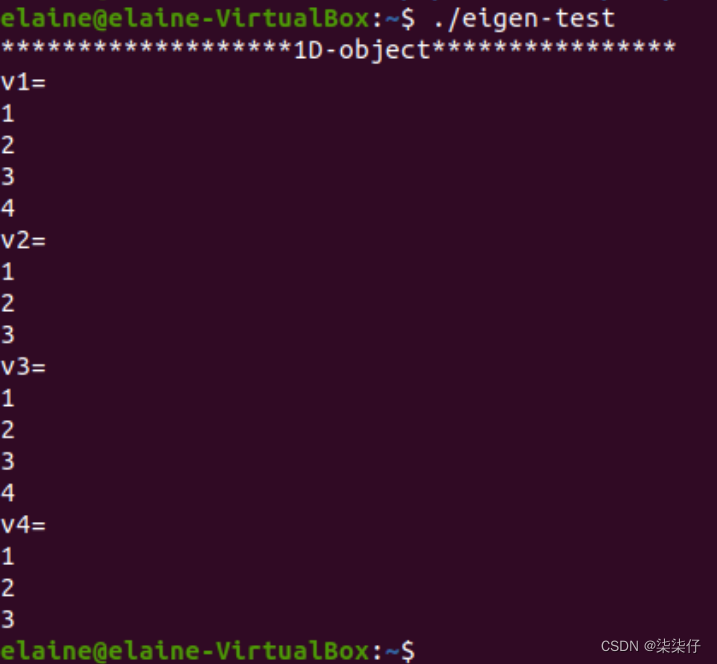
如上图所示就安装成功了。
PS:如果不想踩坑可以先看完后续报错以及解决办法后再执行./build.sh
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
cd ORB_SLAM2
chmod +x build.sh
./build.sh报错1:error: 'usleep' was not declared in this scope
解决办法:在下面的每一个文件中,加上头文件语句***#include<unistd.h>***,然后重新编译
ORB_SLAM2/src/LocalMapping.cc
ORB_SLAM2/src/LoopClosing.cc
ORB_SLAM2/src/System.cc
ORB_SLAM2/src/Tracking.cc
ORB_SLAM2/src/Viewer.cc
ORB_SLAM2/Examples/Monocular/mono_euroc.cc
ORB_SLAM2/Examples/Monocular/mono_kitti.cc
ORB_SLAM2/Examples/Monocular/mono_tum.cc
ORB_SLAM2/Examples/RGB-D/rgbd_tum.cc
ORB_SLAM2/Examples/Stereo/stereo_euroc.cc
ORB_SLAM2/Examples/Stereo/stereo_kitti.cc
报错2:error: static assertion failed: std::map must have the same value_type as its allocator
解决办法:
gedit ~/ORB_SLAM2/include/LoopClosing.h找到如下代码:
typedef map<KeyFrame*,g2o::Sim3,std::less<KeyFrame*>,
Eigen::aligned_allocator<std::pair<const KeyFrame*, g2o::Sim3> > > KeyFrameAndPose;
将其改为
typedef map<KeyFrame*,g2o::Sim3,std::less<KeyFrame*>,
Eigen::aligned_allocator<std::pair<KeyFrame *const, g2o::Sim3> > > KeyFrameAndPose;
然后再执行./build.sh即可。

下载一个数据集进行测试,我这里选择了单目相机,Computer Vision Group - Dataset Download

找了一个最小的下了下来。解压到一个英文路径之后,终端输入下列代码,中间的TUMX.yaml改成对应的TUM1.yaml,或者2、3,根据你下的数据集,因为我这里下的的fr1,所以改成TUM1.yaml。PATH_TO_SEQUENCE_FOLDER替换为你的数据集解压之后所在的路径,
例如我这里是/home/elaine/ORB_SLAM2/datatSet/TUM/rgbd_dataset_freiburg1_desk
cd ORB_SLAM2
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUMX.yaml PATH_TO_SEQUENCE_FOLDER如果出现如下界面,没有其他反应,则可能是路径输入错误,
成功运行则如下图
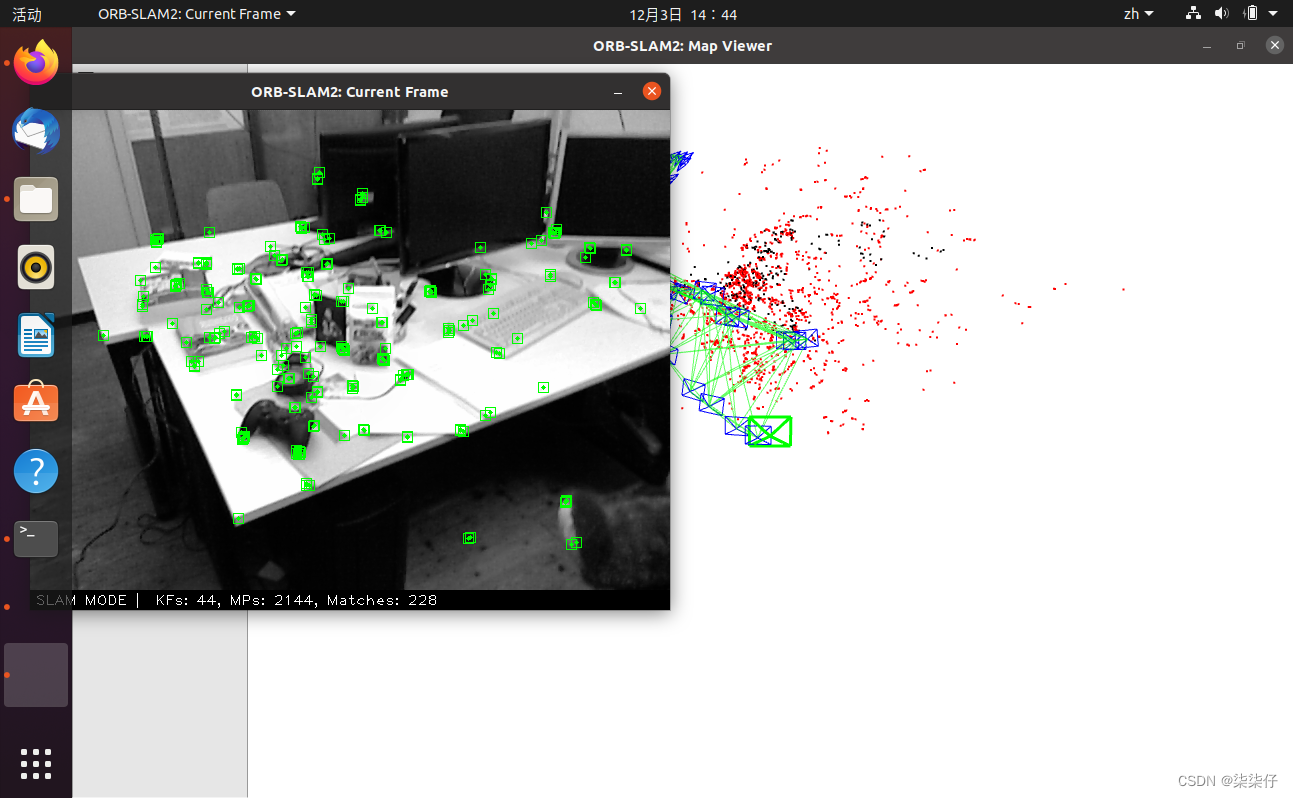
至此ORB-SLAM2的安装和试运行就全部完成了。
总的来说,我对ruby还比较陌生,我正在为我正在创建的对象编写一些rspec测试用例。许多测试用例都非常基础,我只是想确保正确填充和返回值。我想知道是否有办法使用循环结构来执行此操作。不必为我要测试的每个方法都设置一个assertEquals。例如:describeitem,"TestingtheItem"doit"willhaveanullvaluetostart"doitem=Item.new#HereIcoulddotheitem.name.shouldbe_nil#thenIcoulddoitem.category.shouldbe_nilendend但我想要一些方法来使用
我想为Heroku构建一个Rails3应用程序。他们使用Postgres作为他们的数据库,所以我通过MacPorts安装了postgres9.0。现在我需要一个postgresgem并且共识是出于性能原因你想要pggem。但是我对我得到的错误感到非常困惑当我尝试在rvm下通过geminstall安装pg时。我已经非常明确地指定了所有postgres目录的位置可以找到但仍然无法完成安装:$envARCHFLAGS='-archx86_64'geminstallpg--\--with-pg-config=/opt/local/var/db/postgresql90/defaultdb/po
在选择我想要运行操作的频率时,唯一的选项是“每天”、“每小时”和“每10分钟”。谢谢!我想为我的Rails3.1应用程序运行调度程序。 最佳答案 这不是一个优雅的解决方案,但您可以安排它每天运行,并在实际开始工作之前检查日期是否为当月的第一天。 关于ruby-如何每月在Heroku运行一次Scheduler插件?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/8692687/
我打算为ruby脚本创建一个安装程序,但我希望能够确保机器安装了RVM。有没有一种方法可以完全离线安装RVM并且不引人注目(通过不引人注目,就像创建一个可以做所有事情的脚本而不是要求用户向他们的bash_profile或bashrc添加一些东西)我不是要脚本本身,只是一个关于如何走这条路的快速指针(如果可能的话)。我们还研究了这个很有帮助的问题:RVM-isthereawayforsimpleofflineinstall?但有点误导,因为答案只向我们展示了如何离线在RVM中安装ruby。我们需要能够离线安装RVM本身,并查看脚本https://raw.github.com/wayn
exe应该在我打开页面时运行。异步进程需要运行。有什么方法可以在ruby中使用两个参数异步运行exe吗?我已经尝试过ruby命令-system()、exec()但它正在等待过程完成。我需要用参数启动exe,无需等待进程完成是否有任何rubygems会支持我的问题? 最佳答案 您可以使用Process.spawn和Process.wait2:pid=Process.spawn'your.exe','--option'#Later...pid,status=Process.wait2pid您的程序将作为解释器的子进程执行。除
我尝试运行2.x应用程序。我使用rvm并为此应用程序设置其他版本的ruby:$rvmuseree-1.8.7-head我尝试运行服务器,然后出现很多错误:$script/serverNOTE:Gem.source_indexisdeprecated,useSpecification.Itwillberemovedonorafter2011-11-01.Gem.source_indexcalledfrom/Users/serg/rails_projects_terminal/work_proj/spohelp/config/../vendor/rails/railties/lib/r
我有一个奇怪的问题:我在rvm上安装了rubyonrails。一切正常,我可以创建项目。但是在我输入“railsnew”时重新启动后,我有“程序'rails'当前未安装。”。SystemUbuntu12.04ruby-v"1.9.3p194"gemlistactionmailer(3.2.5)actionpack(3.2.5)activemodel(3.2.5)activerecord(3.2.5)activeresource(3.2.5)activesupport(3.2.5)arel(3.0.2)builder(3.0.0)bundler(1.1.4)coffee-rails(
我刚刚为fedora安装了emacs。我想用emacs编写ruby。为ruby提供代码提示、代码完成类型功能所需的工具、扩展是什么? 最佳答案 ruby-mode已经包含在Emacs23之后的版本中。不过,它也可以通过ELPA获得。您可能感兴趣的其他一些事情是集成RVM、feature-mode(Cucumber)、rspec-mode、ruby-electric、inf-ruby、rinari(用于Rails)等。这是我当前用于Ruby开发的Emacs配置:https://github.com/citizen428/emacs
我正在尝试在我的centos服务器上安装therubyracer,但遇到了麻烦。$geminstalltherubyracerBuildingnativeextensions.Thiscouldtakeawhile...ERROR:Errorinstallingtherubyracer:ERROR:Failedtobuildgemnativeextension./usr/local/rvm/rubies/ruby-1.9.3-p125/bin/rubyextconf.rbcheckingformain()in-lpthread...yescheckingforv8.h...no***e
我的最终目标是安装当前版本的RubyonRails。我在OSXMountainLion上运行。到目前为止,这是我的过程:已安装的RVM$\curl-Lhttps://get.rvm.io|bash-sstable检查已知(我假设已批准)安装$rvmlistknown我看到当前的稳定版本可用[ruby-]2.0.0[-p247]输入命令安装$rvminstall2.0.0-p247注意:我也试过这些安装命令$rvminstallruby-2.0.0-p247$rvminstallruby=2.0.0-p247我很快就无处可去了。结果:$rvminstall2.0.0-p247Search