图像拼接(Image Stitching)是一种利用实景图像组成全景空间的技术,它将多幅图像拼接成一幅大尺度图像或360°全景图,可视作场景重建的一种特殊情况,其中图像仅通过平面单应性进行关联。图像拼接在运动检测和跟踪,增强现实,分辨率增强,视频压缩和图像稳定等机器视觉领域有很大的应用。
图像拼接的输出是两个输入图像的并集。
1、特征点提取(Feature Extraction):检测输入图像中的特征点。
2、图像配准(Image Registration):建立了图像之间的集合对应关系,使它们可在一个共同的参照系中进行变换、比较和分析。
3、投影变换(Warping):将其中一幅图像的图像重投影,并将图像放置在更大的画布上。
4、图像融合(Blending):通过改变边界附近的图像灰度级,去除这些缝隙,创建混合图像,从而在图像之间实现平滑过渡。混合模式(Blending Modes)用于将两层融合到一起。
用SIFT算法来实现图像拼接是很常用的方法,但是因为SIFT计算量很大,所以在速度要求很高的场合下不再适用。所以,它的改进方法SURF因为在速度方面有了明显的提高(速度是SIFT的3倍),所以在图像拼接领域还是大有作为。虽说SURF精确度和稳定性不及SIFT,但是其综合能力还是优越一些。下面将详细介绍拼接的主要步骤。
//创建SURF对象
//create 参数 海森矩阵阈值
Ptr<SURF> surf;
surf = SURF::create(800);
//暴力匹配器
BFMatcher matcher;
vector<KeyPoint> key1, key2;
Mat c, d;
//寻找特征点
surf->detectAndCompute(left, Mat(), key2, d);
surf->detectAndCompute(right, Mat(), key1, c);
//特征点对比 保存
vector<DMatch>matches;
//使用暴力匹配器匹配特征点 保存
matcher.match(d, c, matches);
//排序 从小到大
sort(matches.begin(), matches.end());
//保留最优的特征点收集
vector<DMatch>good_matches;
int ptrPoint = std::min(50, (int)(matches.size()*0.15));
for(int i=0; i<ptrPoint; i++)
good_matches.push_back(matches[i]);
//最佳匹配的特征点连成一线
Mat outimg;
drawMatches(left, key2, right, key1, good_matches, outimg,
Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
imshow("outimg", outimg);
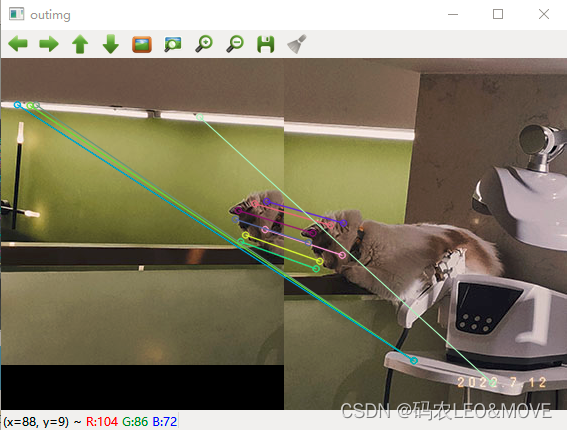
这样子就得到了两幅待拼接图的匹配点集,接下来进行图像的配准,即将两张图像转换为同一坐标下,这里需要使用findHomography函数来求得变换矩阵。
但是需要注意的是,findHomography函数所要用到的点集是Point2f类型的,所以需要对刚得到的点集good_matches再做一次处理,使其转换为Point2f类型的点集。
//特征点配准
vector<Point2f>imagepoint1, imagepoint2;
for(int i=0; i<good_matches.size(); i++)
{
imagepoint1.push_back(key1[good_matches[i].trainIdx].pt);
imagepoint2.push_back(key2[good_matches[i].queryIdx].pt);
}
上述操作后,用imagepoint1, imagepoint2去求变换矩阵,并且实现图像配准。
值得注意的是findHomography函数的参数中选择CV_RANSAC。使用RANSAC算法继续筛选可靠地匹配点,这使得匹配点解更为精确。
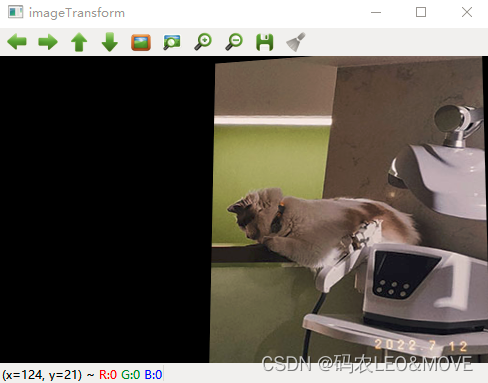
//透视转换
Mat homo = findHomography(imagepoint1, imagepoint2, CV_RANSAC);
imshow("homo", homo);
//右图四个顶点坐标转换计算
CalcCorners(homo, right);
Mat imageTransform;
warpPerspective(right, imageTransform, homo,
Size(MAX(corners.right_top.x, corners.right_bottom.x), left.rows));
imshow("imageTransform", imageTransform);
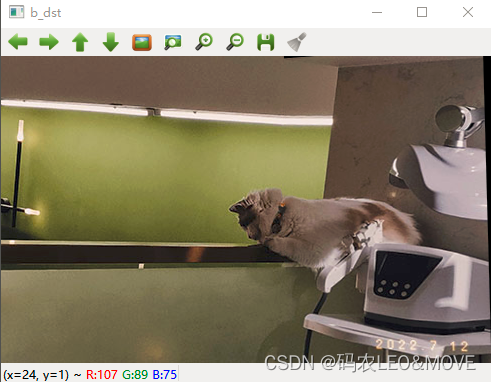
拷贝的思路很简单,就是将左图直接拷贝到配准图上就可以了。
int dst_width = imageTransform.cols;
int dst_height = imageTransform.rows;
Mat dst(dst_height, dst_width, CV_8UC3);
dst.setTo(0);
imageTransform.copyTo(dst(Rect(0, 0, imageTransform.cols, imageTransform.rows)));
left.copyTo(dst(Rect(0, 0, left.cols, left.rows)));
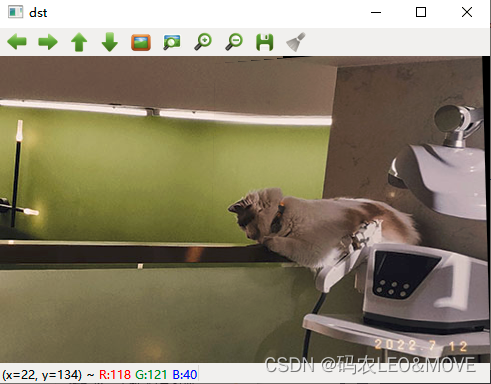
OptimizeSeam(left, imageTransform, dst);
imshow("dst", dst);
waitKey(0);
//优化两图的连接处,使得拼接自然
void OptimizeSeam(Mat& img1, Mat& trans, Mat& dst)
{
int start = MIN(corners.left_top.x, corners.left_bottom.x);//开始位置,即重叠区域的左边界
double processWidth = img1.cols - start;//重叠区域的宽度
int rows = dst.rows;
int cols = img1.cols; //注意,是列数*通道数
double alpha = 1;//img1中像素的权重
for (int i = 0; i < rows; i++)
{
uchar* p = img1.ptr<uchar>(i); //获取第i行的首地址
uchar* t = trans.ptr<uchar>(i);
uchar* d = dst.ptr<uchar>(i);
for (int j = start; j < cols; j++)
{
//如果遇到图像trans中无像素的黑点,则完全拷贝img1中的数据
if (t[j * 3] == 0 && t[j * 3 + 1] == 0 && t[j * 3 + 2] == 0)
{
alpha = 1;
}
else
{
//img1中像素的权重,与当前处理点距重叠区域左边界的距离成正比,实验证明,这种方法确实好
alpha = (processWidth - (j - start)) / processWidth;
}
d[j * 3] = p[j * 3] * alpha + t[j * 3] * (1 - alpha);
d[j * 3 + 1] = p[j * 3 + 1] * alpha + t[j * 3 + 1] * (1 - alpha);
d[j * 3 + 2] = p[j * 3 + 2] * alpha + t[j * 3 + 2] * (1 - alpha);
}
}
}
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/xfeatures2d.hpp>
#include <opencv2/calib3d.hpp>
#include <opencv2/imgproc.hpp>
using namespace std;
using namespace cv;
using namespace cv::xfeatures2d;
typedef struct
{
Point2f left_top;
Point2f left_bottom;
Point2f right_top;
Point2f right_bottom;
}four_corners_t;
four_corners_t corners;
void CalcCorners(const Mat& H, const Mat& src)
{
double v2[] = { 0, 0, 1 };//左上角
double v1[3];//变换后的坐标值
Mat V2 = Mat(3, 1, CV_64FC1, v2); //列向量
Mat V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
//左上角(0,0,1)
cout << "V2: " << V2 << endl;
cout << "V1: " << V1 << endl;
corners.left_top.x = v1[0] / v1[2];
corners.left_top.y = v1[1] / v1[2];
//左下角(0,src.rows,1)
v2[0] = 0;
v2[1] = src.rows;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.left_bottom.x = v1[0] / v1[2];
corners.left_bottom.y = v1[1] / v1[2];
//右上角(src.cols,0,1)
v2[0] = src.cols;
v2[1] = 0;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.right_top.x = v1[0] / v1[2];
corners.right_top.y = v1[1] / v1[2];
//右下角(src.cols,src.rows,1)
v2[0] = src.cols;
v2[1] = src.rows;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.right_bottom.x = v1[0] / v1[2];
corners.right_bottom.y = v1[1] / v1[2];
}
//优化两图的连接处,使得拼接自然
void OptimizeSeam(Mat& img1, Mat& trans, Mat& dst)
{
int start = MIN(corners.left_top.x, corners.left_bottom.x);//开始位置,即重叠区域的左边界
double processWidth = img1.cols - start;//重叠区域的宽度
int rows = dst.rows;
int cols = img1.cols; //注意,是列数*通道数
double alpha = 1;//img1中像素的权重
for (int i = 0; i < rows; i++)
{
uchar* p = img1.ptr<uchar>(i); //获取第i行的首地址
uchar* t = trans.ptr<uchar>(i);
uchar* d = dst.ptr<uchar>(i);
for (int j = start; j < cols; j++)
{
//如果遇到图像trans中无像素的黑点,则完全拷贝img1中的数据
if (t[j * 3] == 0 && t[j * 3 + 1] == 0 && t[j * 3 + 2] == 0)
{
alpha = 1;
}
else
{
//img1中像素的权重,与当前处理点距重叠区域左边界的距离成正比,实验证明,这种方法确实好
alpha = (processWidth - (j - start)) / processWidth;
}
d[j * 3] = p[j * 3] * alpha + t[j * 3] * (1 - alpha);
d[j * 3 + 1] = p[j * 3 + 1] * alpha + t[j * 3 + 1] * (1 - alpha);
d[j * 3 + 2] = p[j * 3 + 2] * alpha + t[j * 3 + 2] * (1 - alpha);
}
}
}
//计算配准图的四个顶点坐标
int main()
{
Mat left = imread("A.jpg");
Mat right =imread("B.jpg");
imshow("left", left);
imshow("right", right);
//1.特征点提取和匹配
//创建SURF对象
//create 参数 海森矩阵阈值
Ptr<SURF> surf;
surf = SURF::create(800);
//暴力匹配器
BFMatcher matcher;
vector<KeyPoint> key1, key2;
Mat c, d;
//寻找特征点
surf->detectAndCompute(left, Mat(), key2, d);
surf->detectAndCompute(right, Mat(), key1, c);
//特征点对比 保存
vector<DMatch>matches;
//使用暴力匹配器匹配特征点 保存
matcher.match(d, c, matches);
//排序 从小到大
sort(matches.begin(), matches.end());
//保留最优的特征点收集
vector<DMatch>good_matches;
int ptrPoint = std::min(50, (int)(matches.size()*0.15));
for(int i=0; i<ptrPoint; i++)
good_matches.push_back(matches[i]);
//最佳匹配的特征点连成一线
Mat outimg;
drawMatches(left, key2, right, key1, good_matches, outimg,
Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
imshow("outimg", outimg);
//2.图像配准
//特征点配准
vector<Point2f>imagepoint1, imagepoint2;
for(int i=0; i<good_matches.size(); i++)
{
imagepoint1.push_back(key1[good_matches[i].trainIdx].pt);
imagepoint2.push_back(key2[good_matches[i].queryIdx].pt);
}
//透视转换
Mat homo = findHomography(imagepoint1, imagepoint2, CV_RANSAC);
imshow("homo", homo);
//右图四个顶点坐标转换计算
CalcCorners(homo, right);
Mat imageTransform;
warpPerspective(right, imageTransform, homo,
Size(MAX(corners.right_top.x, corners.right_bottom.x), left.rows));
imshow("imageTransform", imageTransform);
//3.图像拷贝
int dst_width = imageTransform.cols;
int dst_height = imageTransform.rows;
Mat dst(dst_height, dst_width, CV_8UC3);
dst.setTo(0);
imageTransform.copyTo(dst(Rect(0, 0, imageTransform.cols, imageTransform.rows)));
left.copyTo(dst(Rect(0, 0, left.cols, left.rows)));
//4.优化拼接最终结果图,去除黑边
OptimizeSeam(left, imageTransform, dst);
imshow("dst", dst);
waitKey(0);
return 0;
}
我有带有Logo图像的公司模型has_attached_file:logo我用他们的Logo创建了许多公司。现在,我需要添加新样式has_attached_file:logo,:styles=>{:small=>"30x15>",:medium=>"155x85>"}我是否应该重新上传所有旧数据以重新生成新样式?我不这么认为……或者有什么rake任务可以重新生成样式吗? 最佳答案 参见Thumbnail-Generation.如果rake任务不适合你,你应该能够在控制台中使用一个片段来调用重新处理!关于相关公司
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m
我正在尝试使用Ruby2.0.0和Rails4.0.0提供的API从imgur中提取图像。我已尝试按照Ruby2.0.0文档中列出的各种方式构建http请求,但均无济于事。代码如下:require'net/http'require'net/https'defimgurheaders={"Authorization"=>"Client-ID"+my_client_id}path="/3/gallery/image/#{img_id}.json"uri=URI("https://api.imgur.com"+path)request,data=Net::HTTP::Get.new(path
2022/8/4更新支持加入水印水印必须包含透明图像,并且水印图像大小要等于原图像的大小pythonconvert_image_to_video.py-f30-mwatermark.pngim_dirout.mkv2022/6/21更新让命令行参数更加易用新的命令行使用方法pythonconvert_image_to_video.py-f30im_dirout.mkvFFMPEG命令行转换一组JPG图像到视频时,是将这组图像视为MJPG流。我需要转换一组PNG图像到视频,FFMPEG就不认了。pyav内置了ffmpeg库,不需要系统带有ffmpeg工具因此我使用ffmpeg的python包装p
有这样的事吗?我想在Ruby程序中使用它。 最佳答案 试试这个http://csl.sublevel3.org/jp2a/此外,Imagemagick可能还有一些东西 关于ruby-是否有将图像文件转换为ASCII艺术的命令行程序或库?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/6510445/
我正在使用Dragonfly在Rails3.1应用程序上处理图像。我正在努力通过url将图像分配给模型。我有一个很好的表格:{:multipart=>true}do|f|%>RemovePicture?Dragonfly的文档指出:Dragonfly提供了一个直接从url分配的访问器:@album.cover_image_url='http://some.url/file.jpg'但是当我在控制台中尝试时:=>#ruby-1.9.2-p290>picture.image_url="http://i.imgur.com/QQiMz.jpg"=>"http://i.imgur.com/QQ
我对图像处理完全陌生。我对JPEG内部是什么以及它是如何工作一无所知。我想知道,是否可以在某处找到执行以下简单操作的ruby代码:打开jpeg文件。遍历每个像素并将其颜色设置为fx绿色。将结果写入另一个文件。我对如何使用ruby-vips库实现这一点特别感兴趣https://github.com/ender672/ruby-vips我的目标-学习如何使用ruby-vips执行基本的图像处理操作(Gamma校正、亮度、色调……)任何指向比“helloworld”更复杂的工作示例的链接——比如ruby-vips的github页面上的链接,我们将不胜感激!如果有ruby-
Organization和Image具有一对一的关系。Image有一个名为filename的列,它存储文件的路径。我在Assets管道中包含这样一个文件:app/assets/other/image.jpg。播种时如何包含此文件的路径?我已经在我的种子文件中尝试过:@organization=...@organization.image.create!(filename:File.open('app/assets/other/image.jpg'))#Ialsotried:#@organization.image.create!(filename:'app/assets/other/i
默认情况下:回形针gem将所有附件存储在公共(public)目录中。出于安全原因,我不想将附件存储在公共(public)目录中,所以我将它们保存在应用程序根目录的uploads目录中:classPost我没有指定url选项,因为我不希望每个图像附件都有一个url。如果指定了url:那么拥有该url的任何人都可以访问该图像。这是不安全的。在user#show页面中:我想实际显示图像。如果我使用所有回形针默认设置,那么我可以这样做,因为图像将在公共(public)目录中并且图像将具有一个url:Someimage:看来,如果我将图像附件保存在公共(public)目录之外并且不指定url(同
使用Paperclip,我想从这样的URL抓取图像:require'open-uri'user.photo=open(url)问题是我最后得到一个像“open-uri20110915-4852-1o7k5uw”这样的文件名。有什么方法可以更改user.photo上的文件名?作为一个额外的变化,Paperclip将我的文件存储在S3上,所以如果我可以在初始分配中设置我想要的文件名就更好了,这样图像就会上传到正确的S3key。像这样:user.photo=open(url),:filename=>URI.parse(url).path 最佳答案